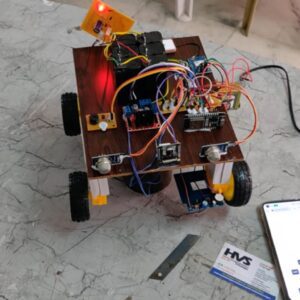
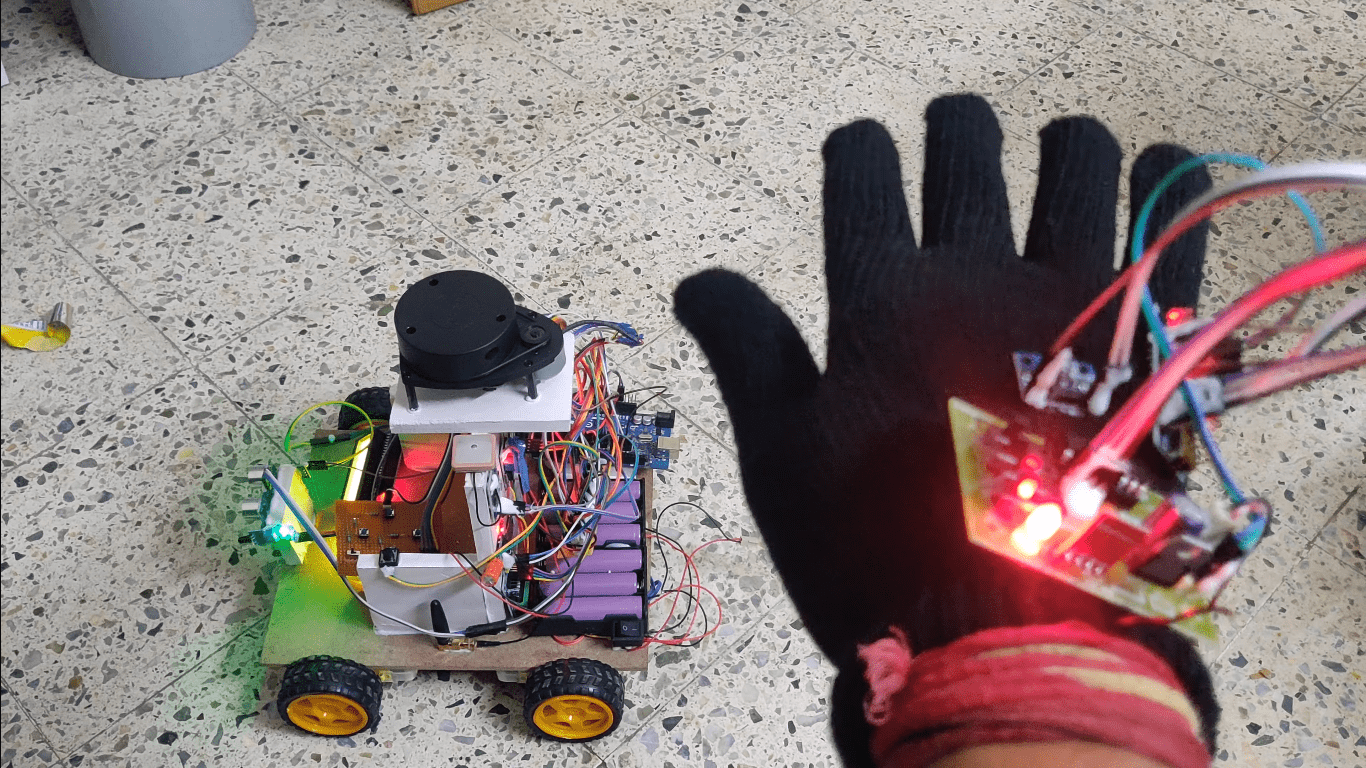
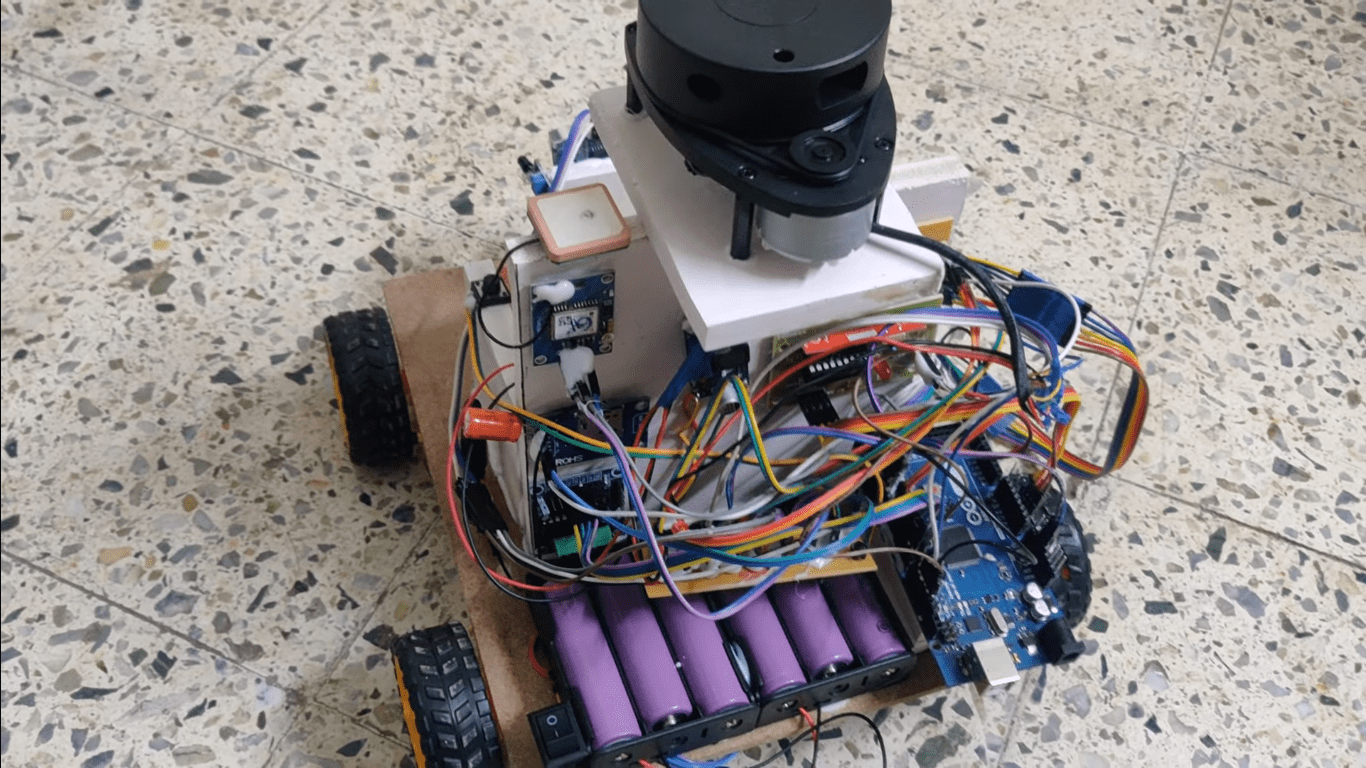
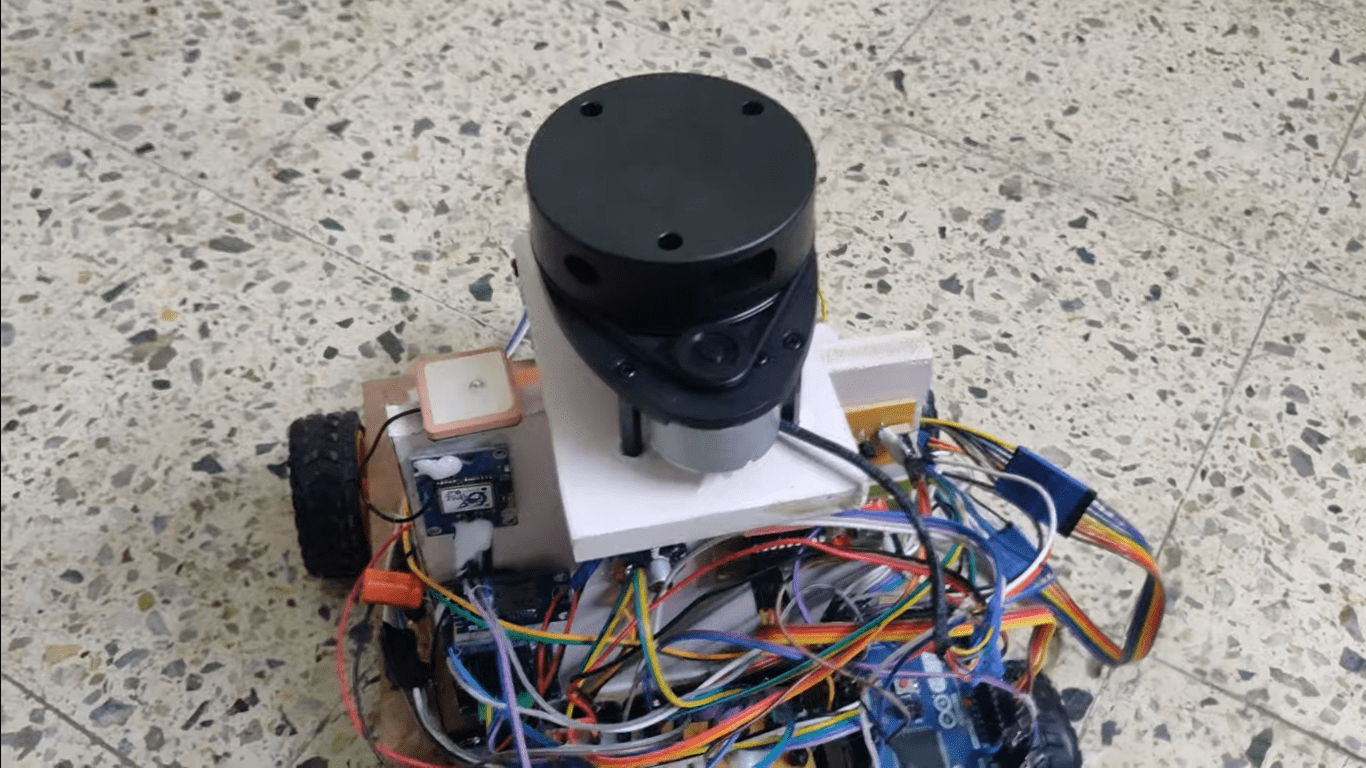
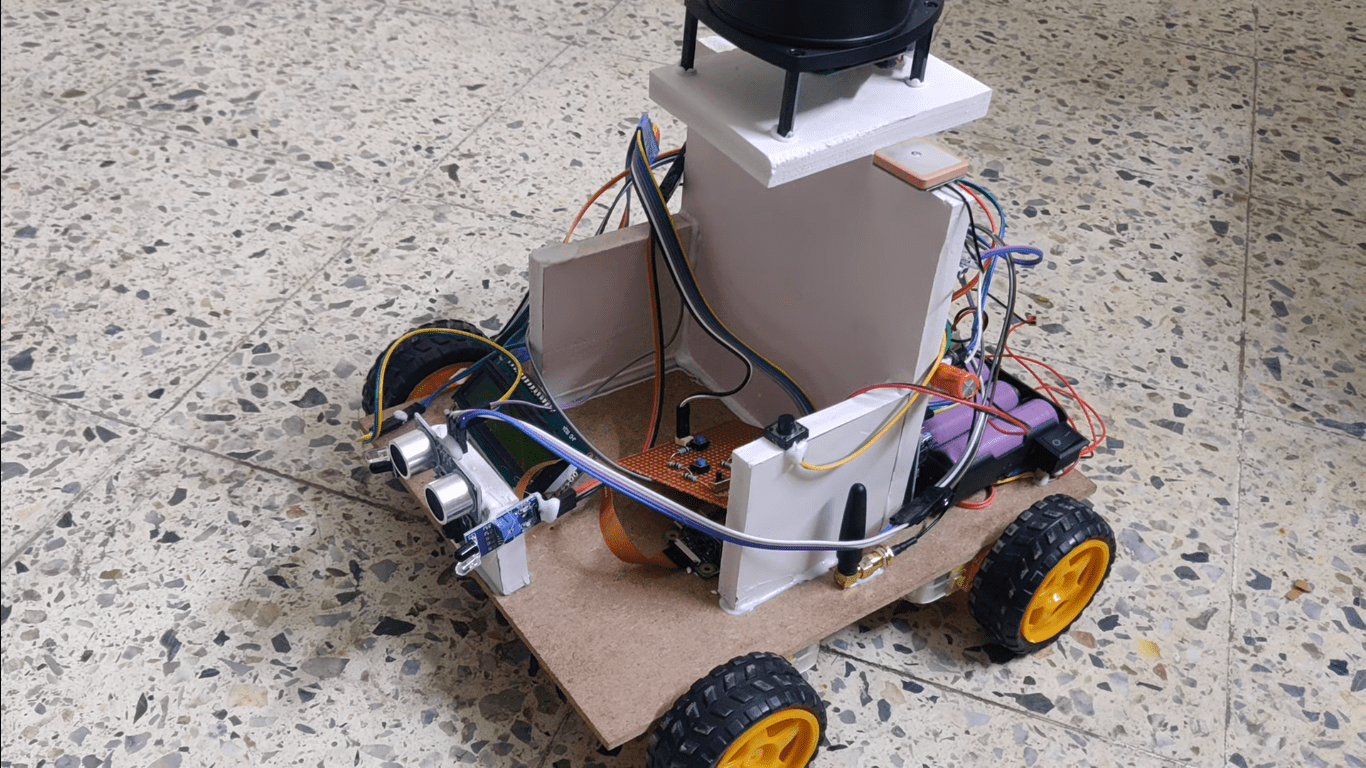
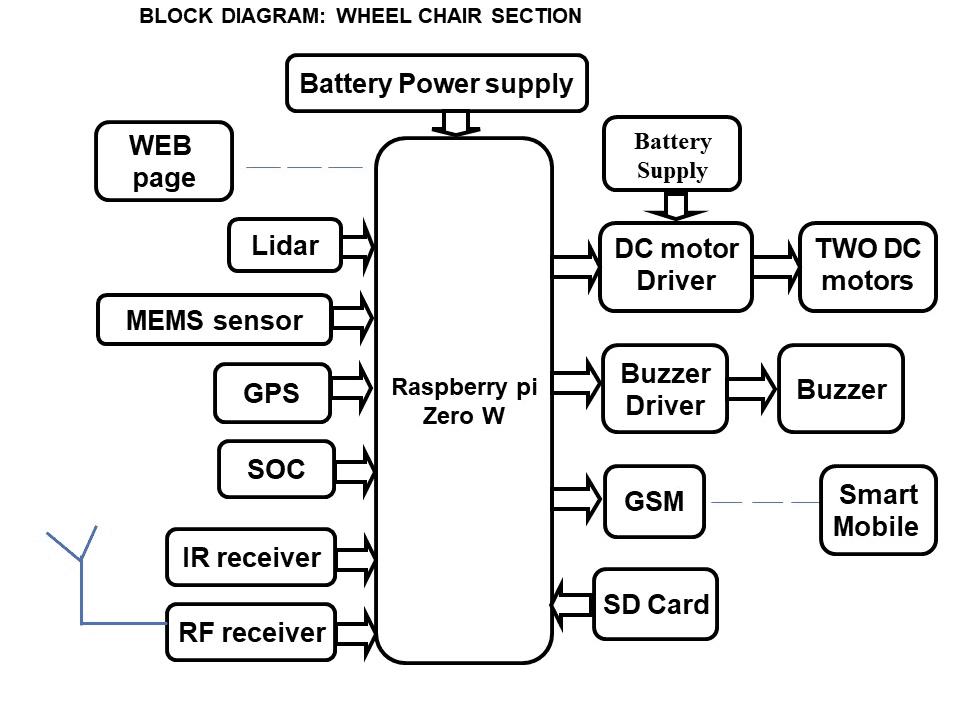
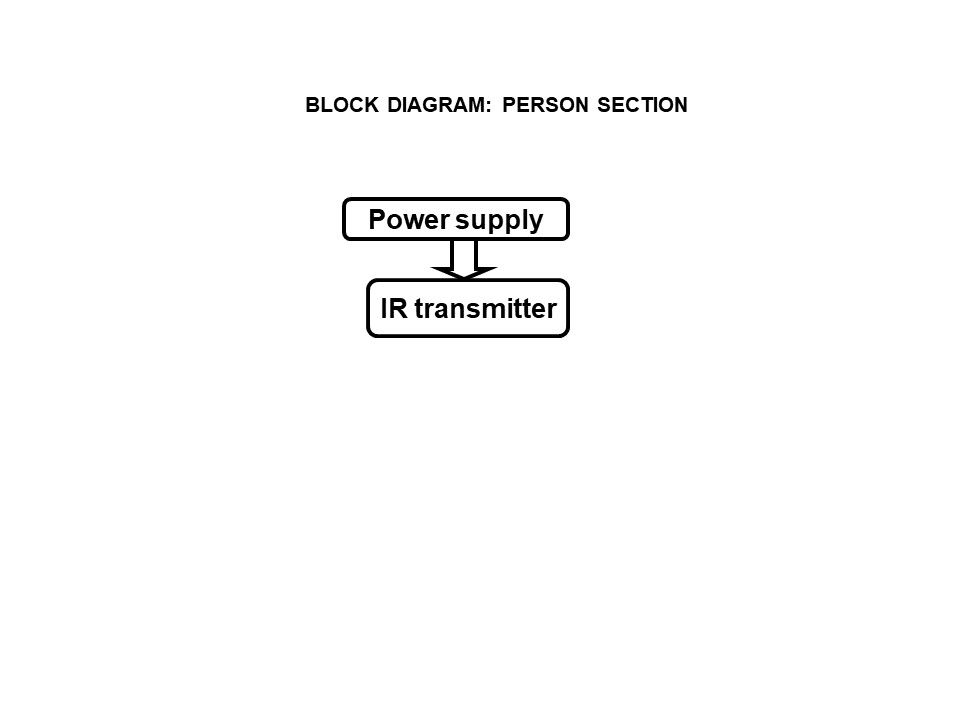
The main aim of this project is to design a smart wheel chair which can control manually through hand gesture using Joystick and which can control autonomously using lidar and GPS and also which can follow the human automatically using IR transmitter and receiver.
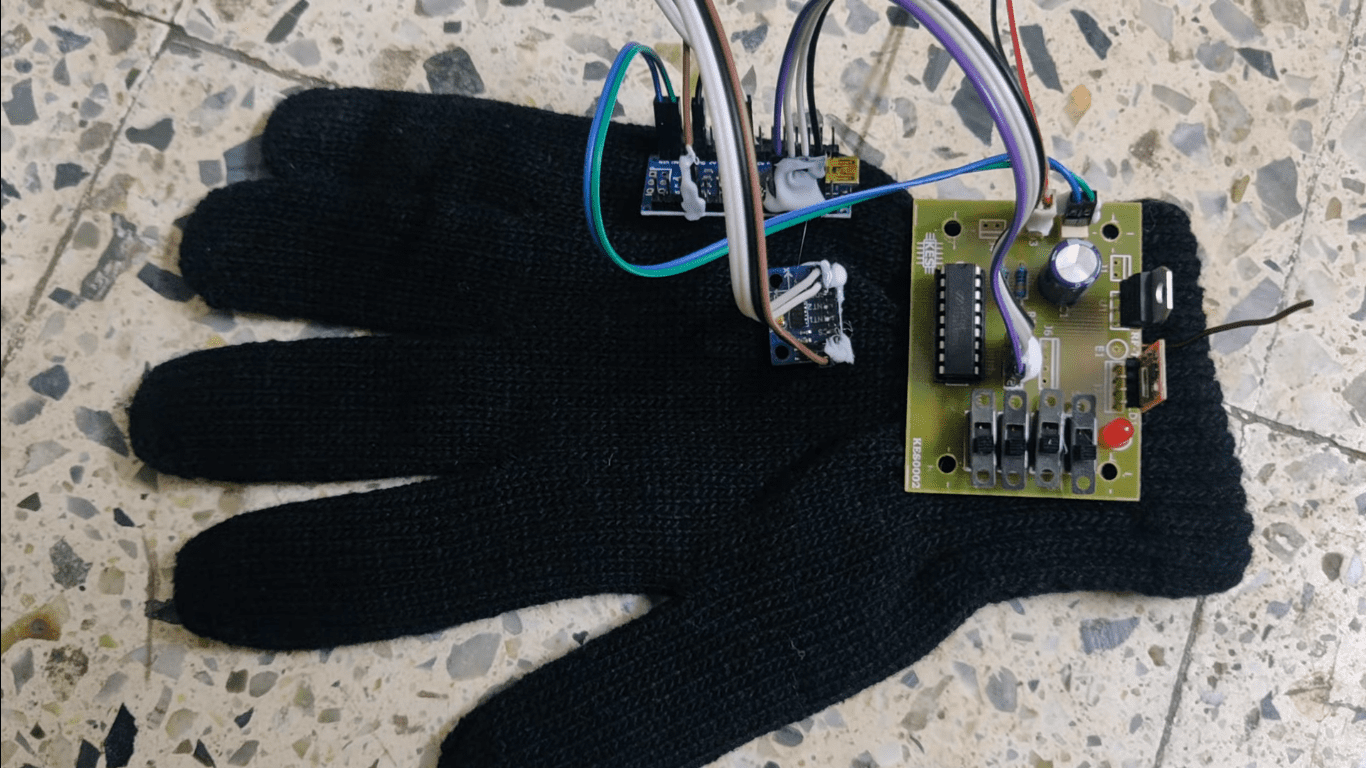
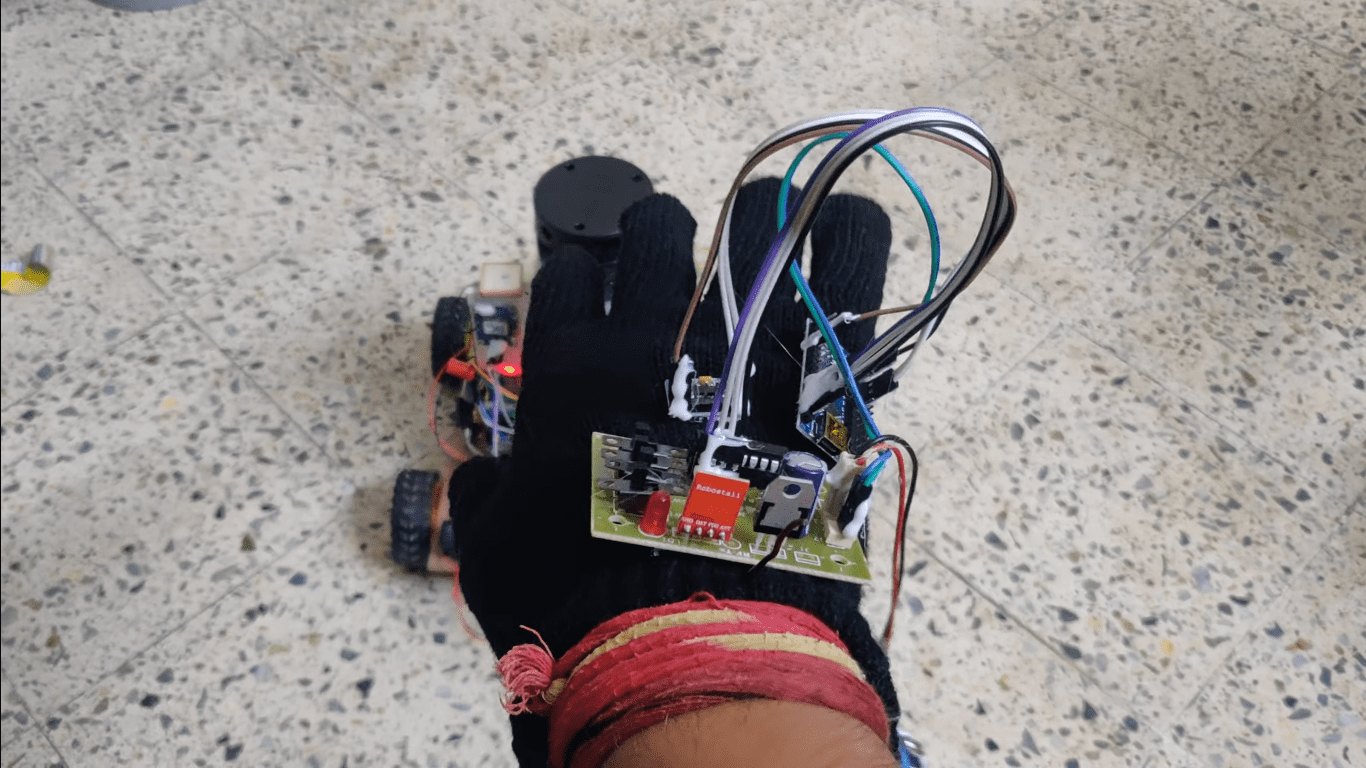
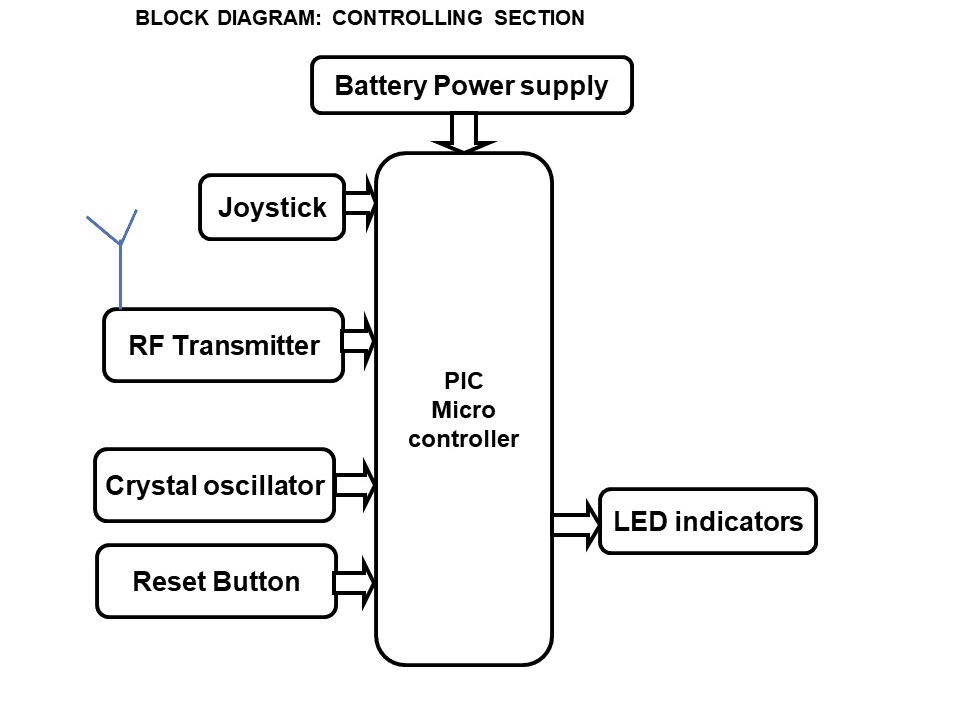
To control the wheel chair by hand movement using joystick. Joystick is a simple device with four direction movement. Wheel chair movement can be controlled in Forward, Reverse, Left, Right and stop direction using JOYSTICK by using wireless RF technology. To control the wheel chair by hand movement using joystick. Joystick is a simple device with four direction movement.
 1 × ₹11,500.00
1 × ₹11,500.00


 video:
video:









