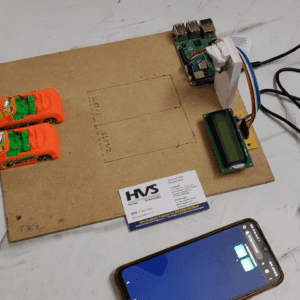
This project presents the design and development of a web-controlled spherical mobile robot using an Arduino Nano and ESP32-CAM module. The robot can be remotely operated through a web browser over a wireless network, enabling real-time movement control and live video monitoring from any connected device such as a mobile phone or computer.
The ESP32-CAM module acts as the main vision unit by capturing and streaming live video to the web interface. Users can observe the robot’s surroundings in real time while controlling the robot’s motion through directional control buttons provided on the webpage. The movement of the robot is achieved using DC motors controlled through an L298 motor driver module connected to the Arduino Nano.
A 3.7V Li-Po battery with a TP4056 charging module powers the system, while a boost converter provides the required operating voltage to the controller and motor driver. An additional feature of the system is image capturing through the web interface. By pressing a capture button on the browser, the ESP32-CAM captures photographs and stores them directly into the MMC card connected to the module for future reference and monitoring purposes.
The proposed system is compact, wireless, and user-friendly, making it suitable for surveillance, inspection, security monitoring, rescue operations, and remote robotic applications.
The objectives of the project include:
To design and develop a spherical mobile robot using Arduino Nano and ESP32-CAM.
To control the robot wirelessly through a web browser interface.
To provide real-time live video streaming from the robot using the ESP32-CAM module.
To control the movement of DC motors using the L298 motor driver.
To capture images remotely by pressing a button on the web page.
To store the captured images in the MMC card for future use.
To develop a compact and portable robotic surveillance system.
To implement rechargeable battery-based power management using TP4056 and Li-Po battery.
To create a low-cost and user-friendly remote monitoring robot for security and inspection applications.
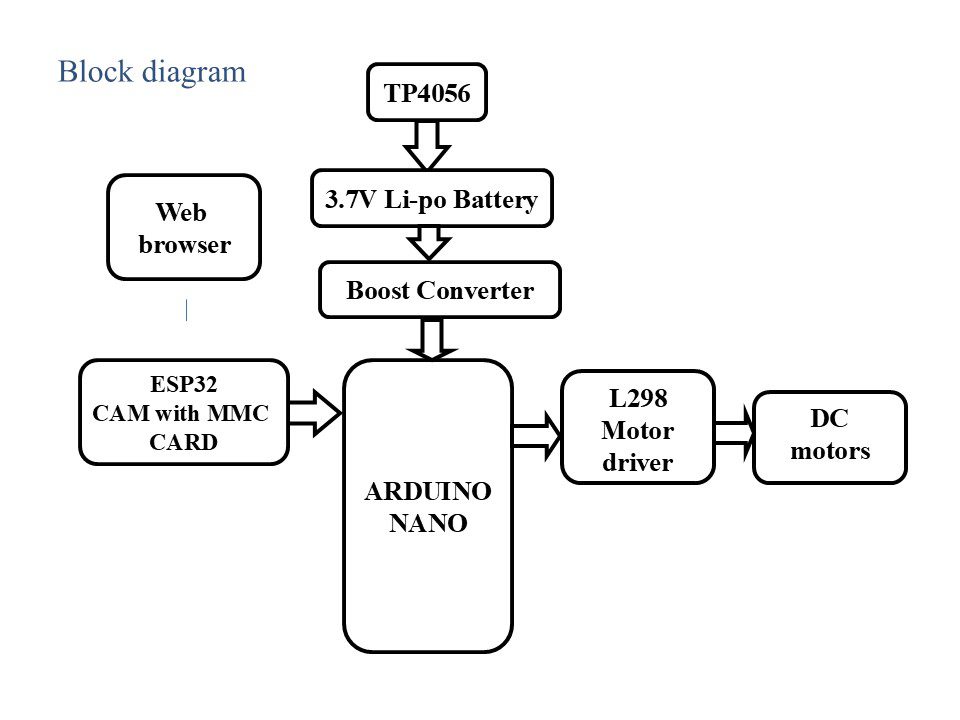
The major building blocks of this project are:
TP4056.
Boost Converter.
Li-Po Battery.
ESP32 Camera.
Arduino Nano.
DC Motors with L298 driver.
Software’s used:
Arduino IDE for compiling and dumping code into Microcontroller
 1 × ₹11,500.00
1 × ₹11,500.00





 video:
video: