No products in the cart.


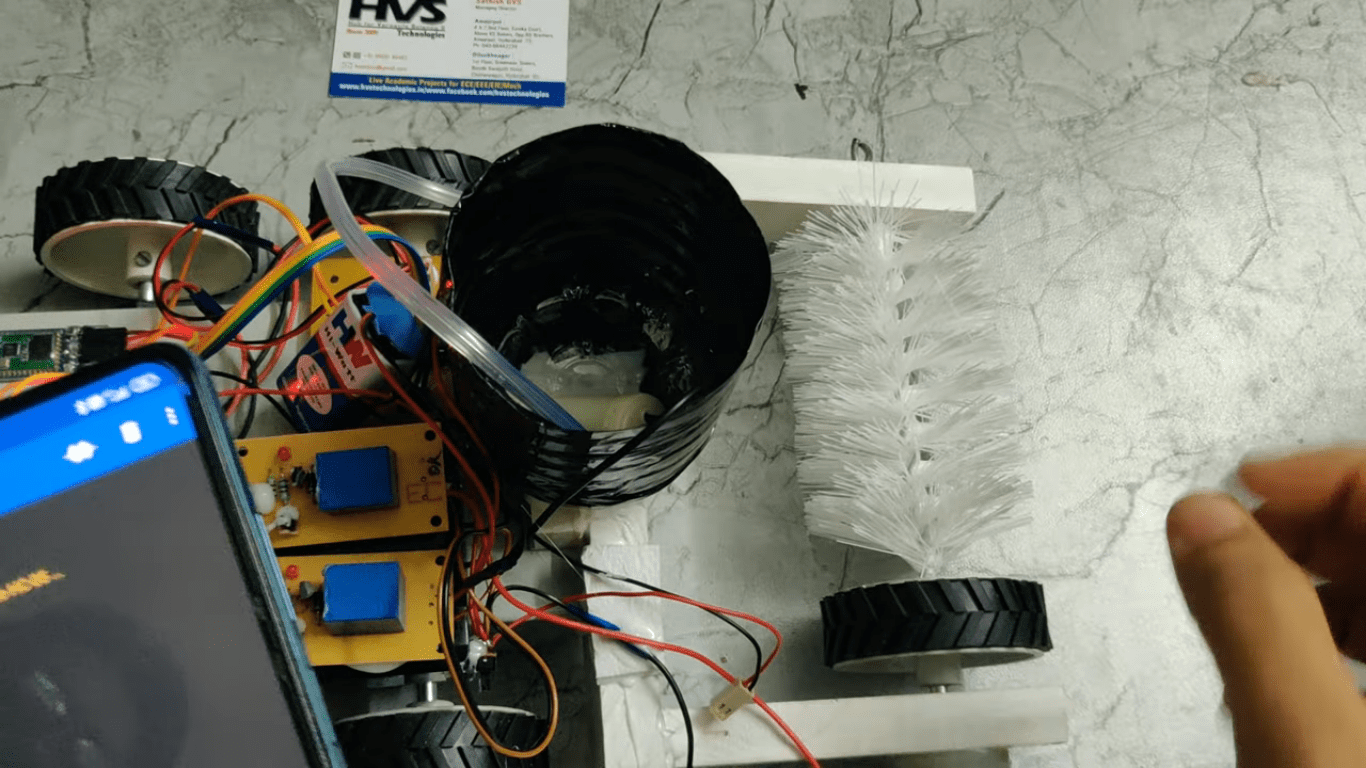
The Solar Panels Farms are generally situated in dirt and dust areas which are mostly in case of tropical countries. The performance of solar panels depends on various factors, the power generated by farm can decreased if there is dust and dirt on panels and this is the main factor for reduction. One can generally assume a reduction of about 40% - 50%, if the panels are not clean properly for 1-2 months. So to overcome this problem and to increase the efficiency of power production cleaning of module on regular basis is necessary. To clean the dust, we develop a cleaning robot, which can clean the panels on regular interval of time.
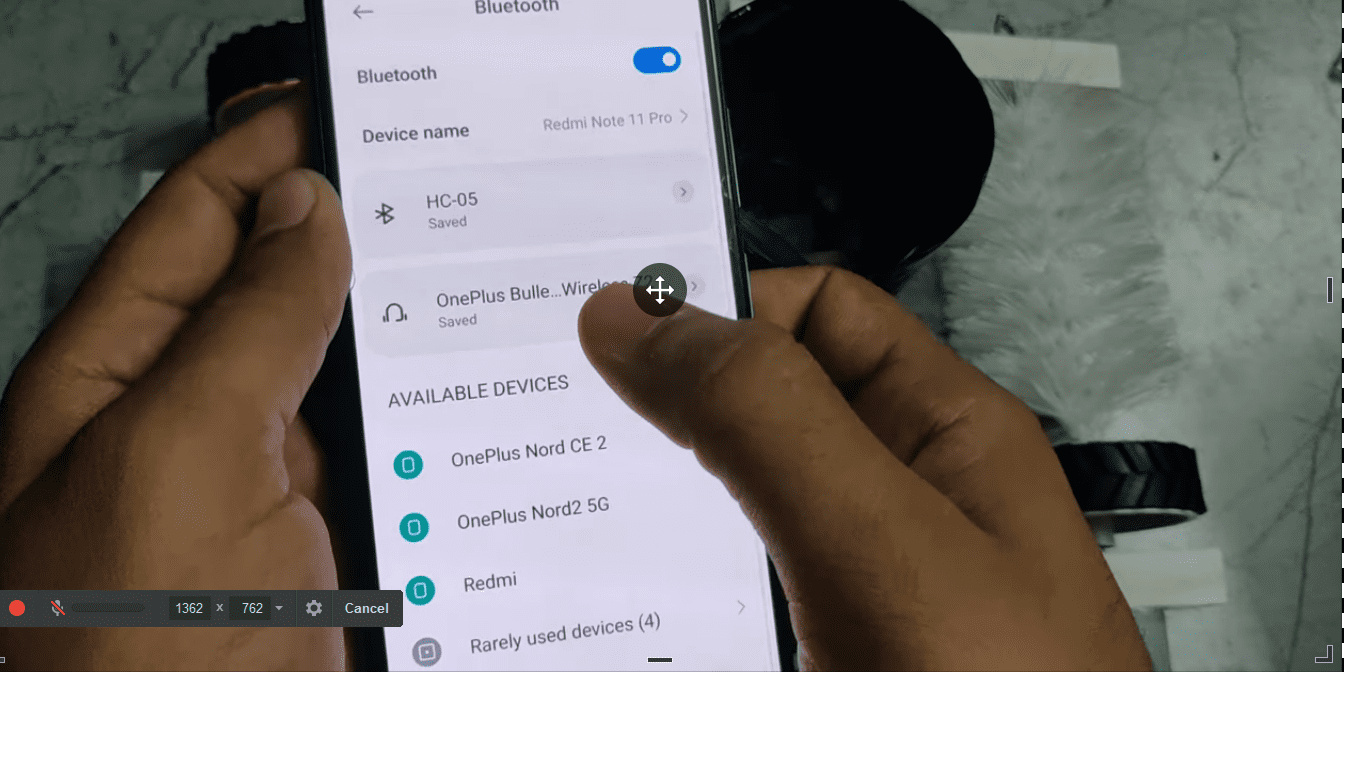
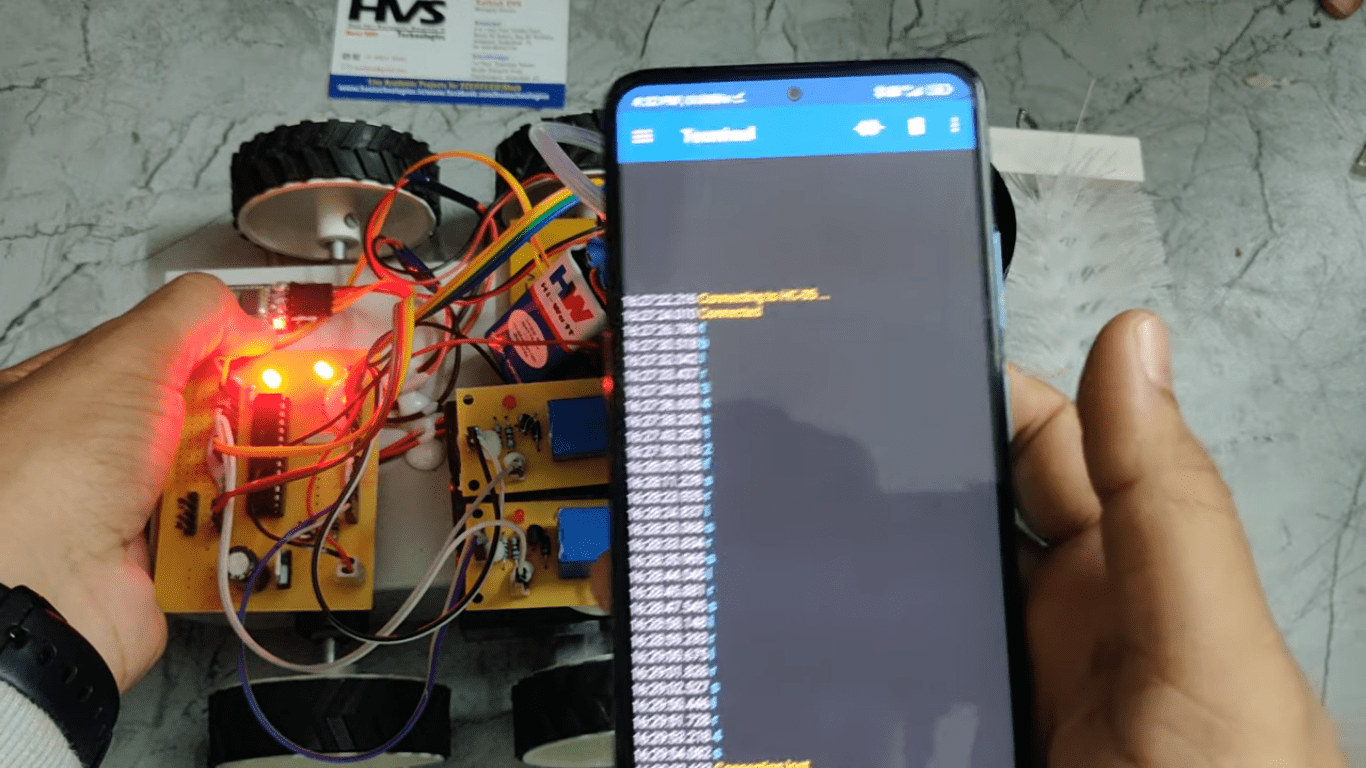
The main aim of this project is to design a robot which uses to clean the solar panels while moving and which can be control by the user from Bluetooth mobile application using android mobile phone.
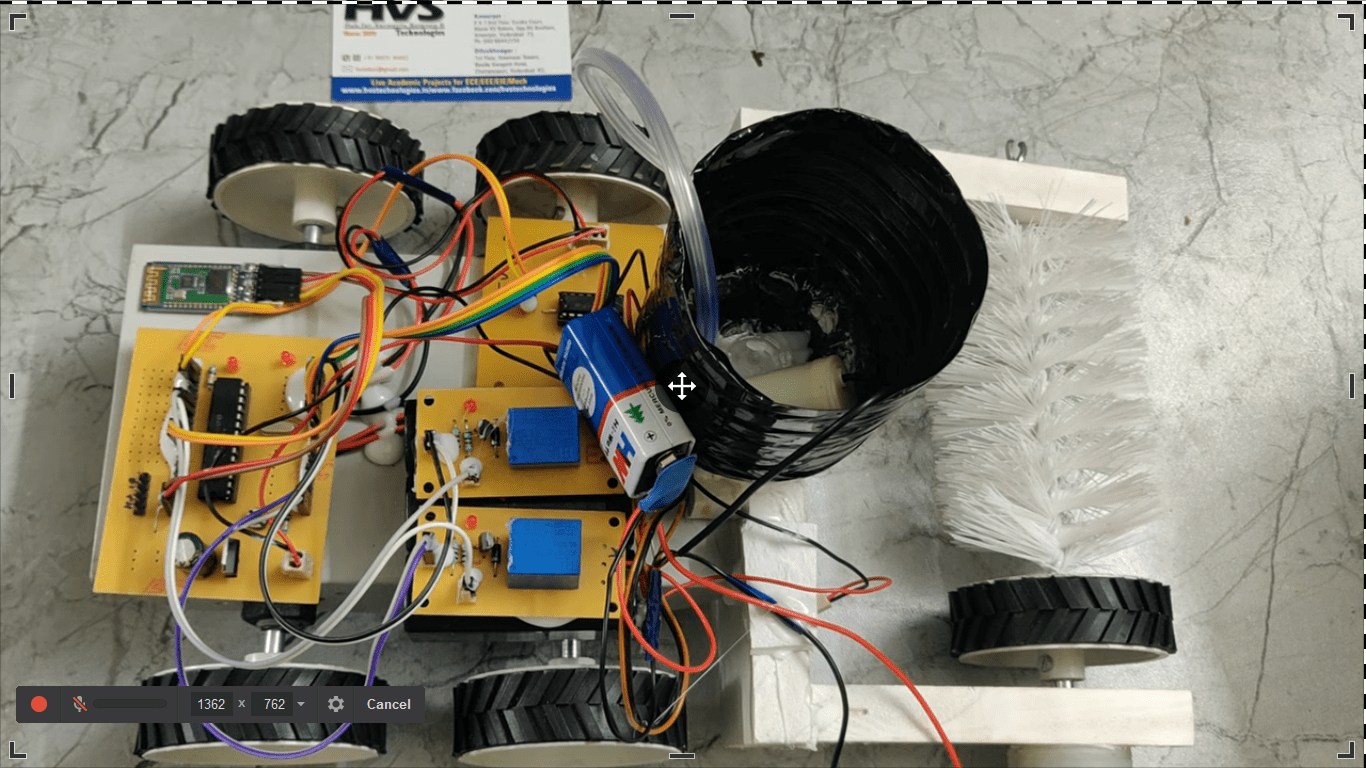
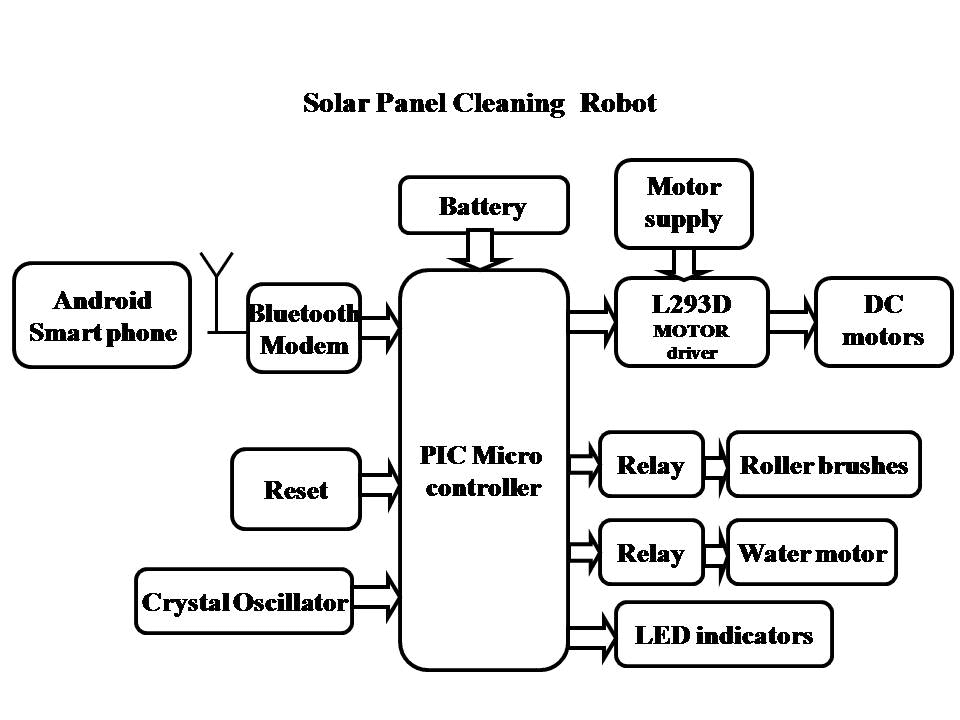
The main controlling part in this project is PIC Microcontroller. Bluetooth module, roller brushes along with Relay, water motor along with relay, DC motors along with L293D motor driver is interfaced to the PIC Microcontroller. User can control the robot along with water motor as well as roller brushes from android Bluetooth application by using mobile phone. This data is received by Bluetooth module and process this data to the microcontroller. Then microcontroller will control the robot, water motor and roller brushes accordingly.
The objectives of the project include:
 Block diagram:
video:
Block diagram:
video:
- Design a Solar panel cleaning robot.
- Control the robot from Bluetooth application.
- Roller brushes-based cleaning setup.
- Relay based switching mechanism of water motor and roller brushes.
- DC motors are uses to moves the robot.
- To achieve this task using PIC Microcontroller.
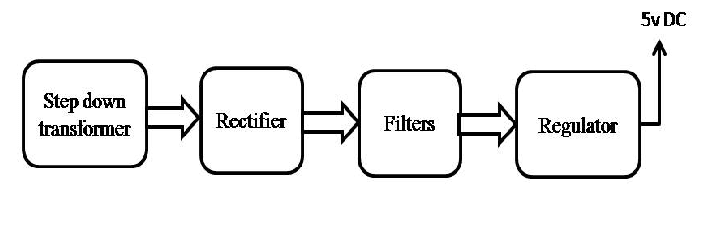
- Battery power supply.
- PIC Microcontroller.
- Reset Button
- Crystal
- LED indicator.
- DC Motors with L293D motor driver.
- Roller brushes with relay.
- Water motor with relay.
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Microcontroller.
- Express SCH for circuit designing.
 Block diagram:
Block diagram:
 video:
video:







