
Subtotal ₹10,500.00


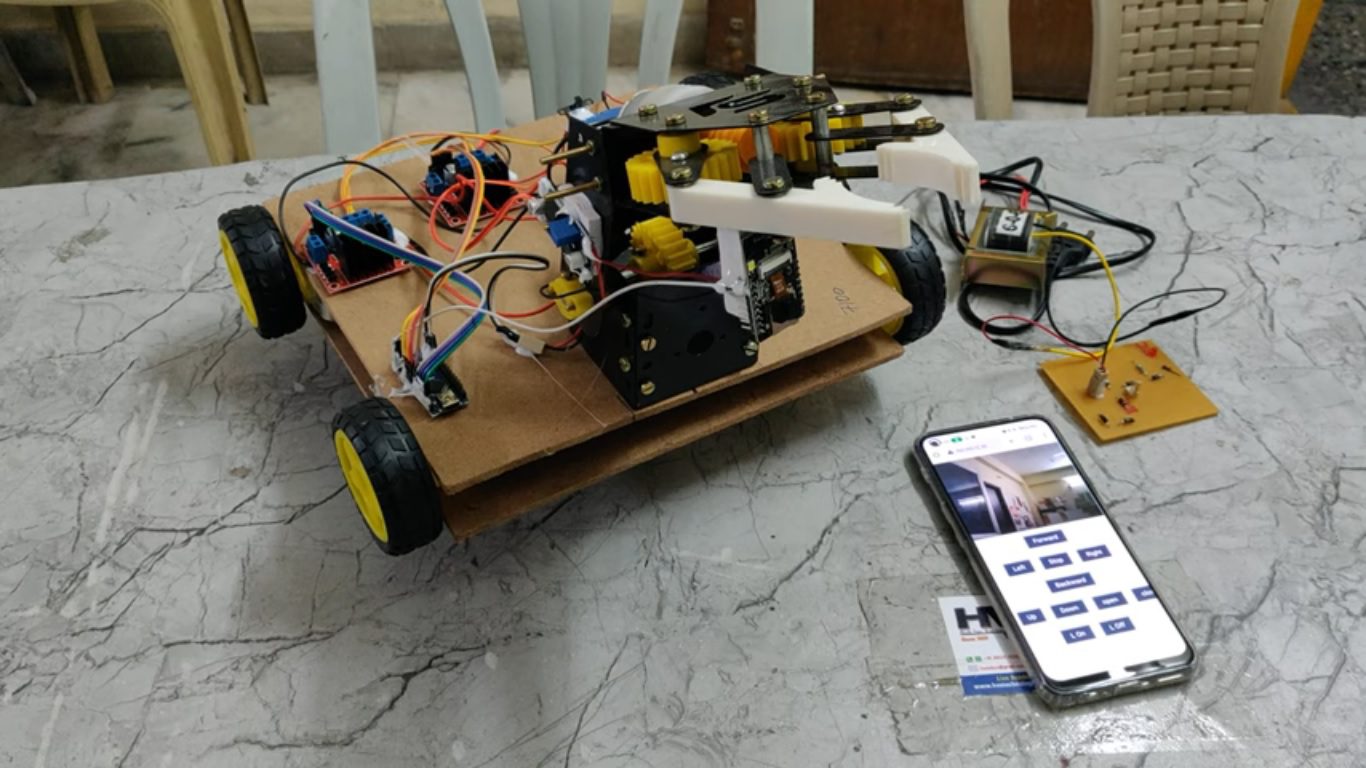
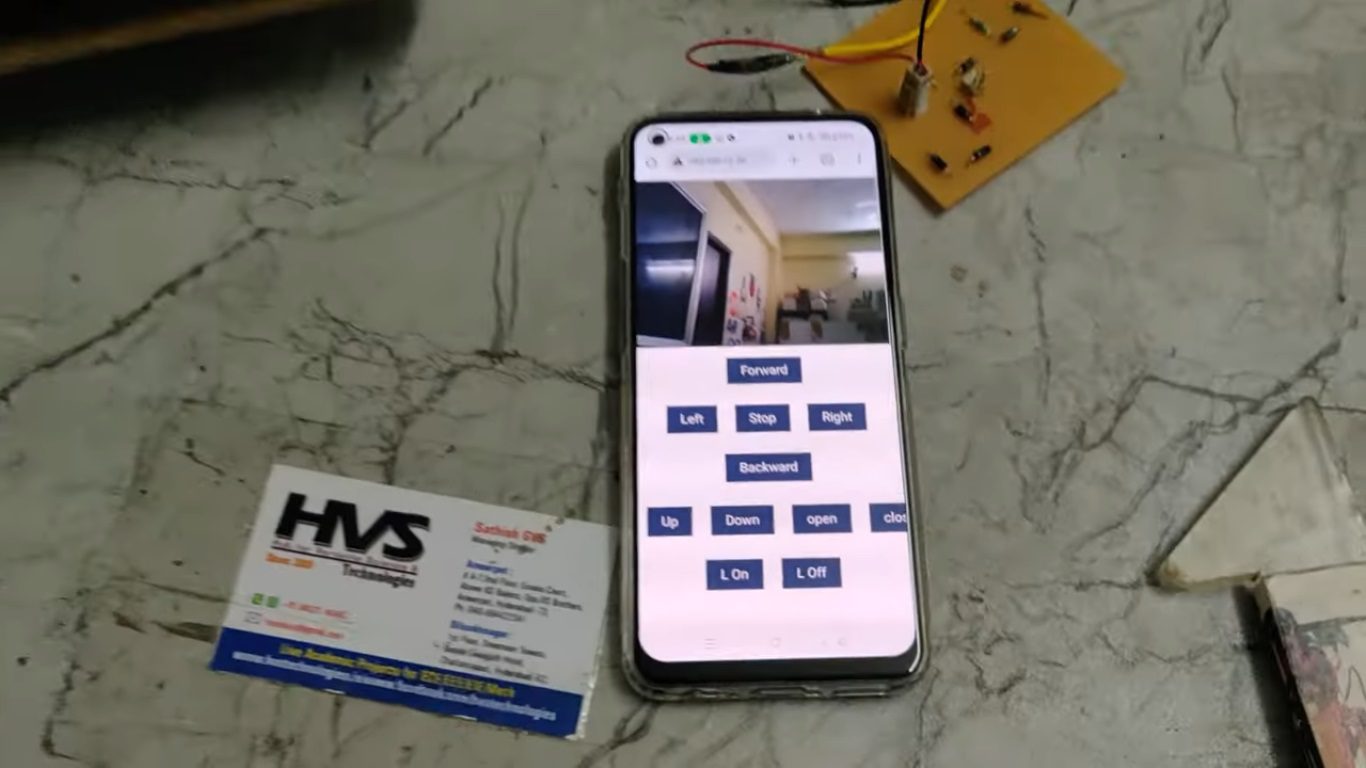

This project presents a touchscreen-based remote-controlled Pick and Place Robotic Arm with surveillance, designed using Internet of Things (IoT) technology for wireless operation through a smartphone or web browser. The system uses an ESP32-CAM module to provide live video streaming, enabling the user to remotely monitor the robot’s surroundings in real time. Through the web interface, the user can control the robot’s movement in all directions (forward, backward, left, and right) and operate the robotic arm to pick and place objects accurately from a remote location.
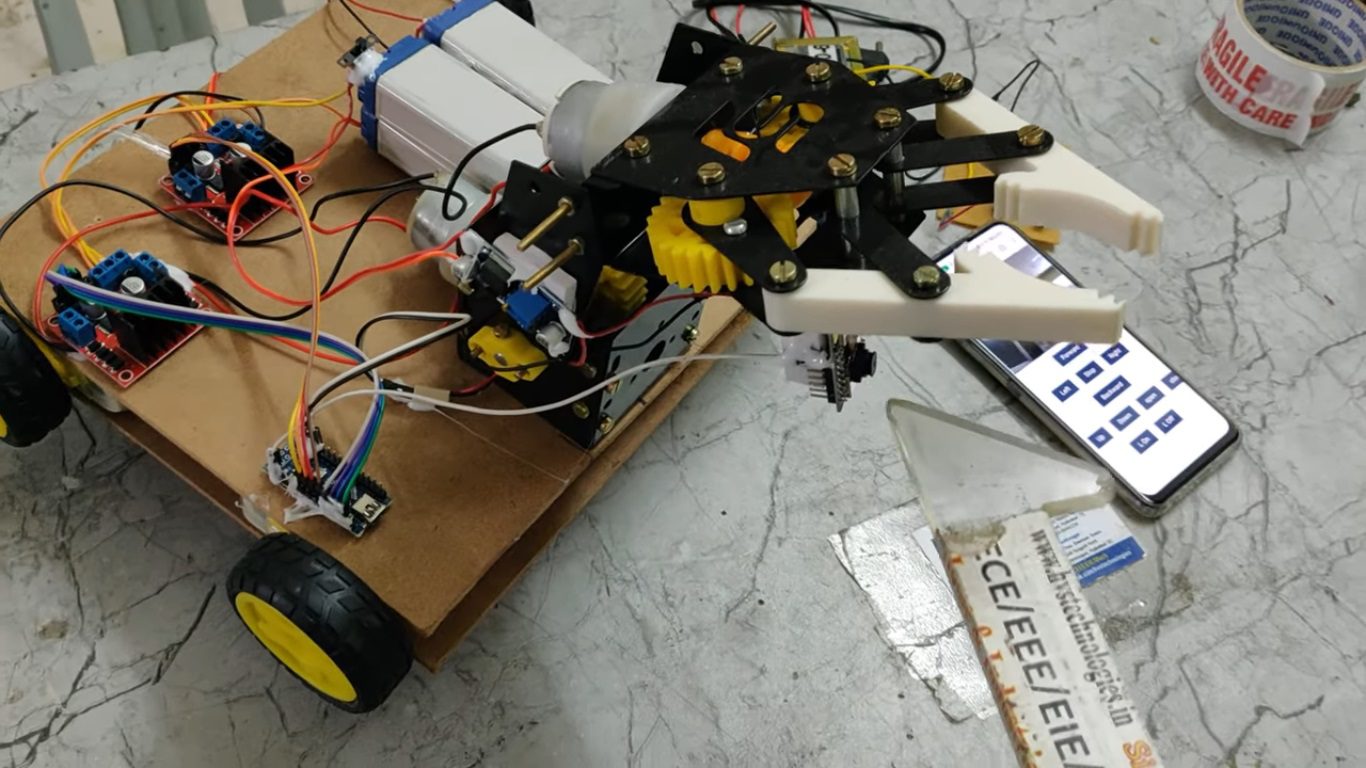
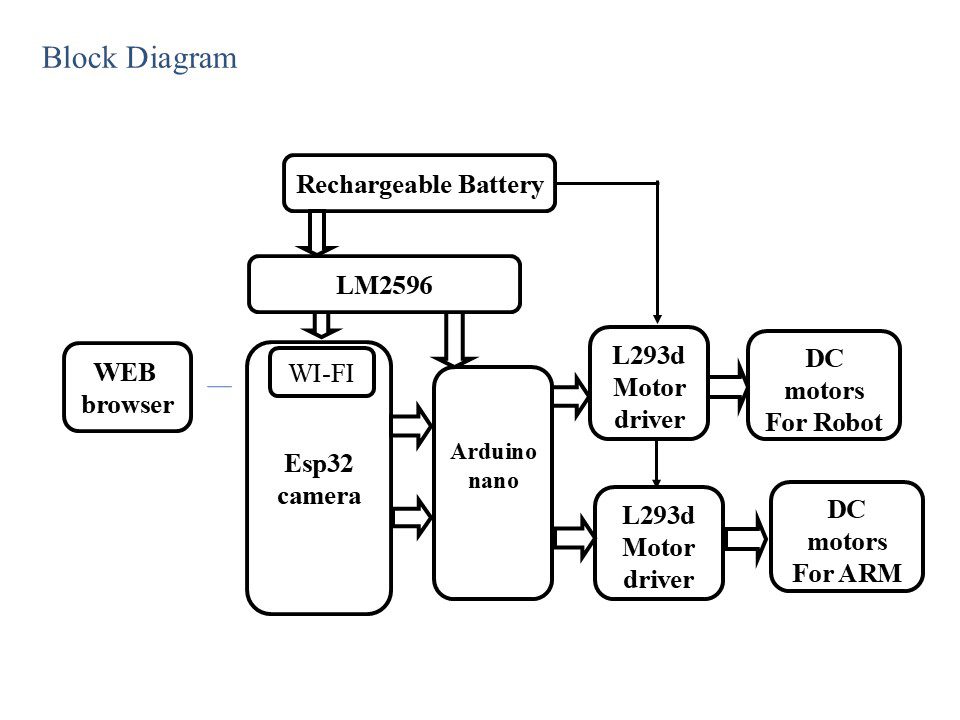
The robot consists of an ESP32 camera module, Arduino Nano, L293D motor drivers, DC motors for robot navigation and arm movement, and a rechargeable 12V battery for power supply. The ESP32-CAM captures live images and transmits them to a dedicated IP address over Wi-Fi, allowing remote access and control through any smart device with a web browser. The Arduino Nano coordinates motor operations based on control commands, while the motor drivers ensure efficient movement of both the robotic platform and the robotic arm. This system can be applied in hazardous environments, industrial automation, surveillance, and remote handling applications, providing a smart, flexible, and cost-effective robotic solution.
Objectives:
 video:
video:
- To design a wireless IoT-based pick and place robotic arm system.
- To control the robot remotely using a smartphone or web browser.
- To provide real-time video surveillance using the ESP32 camera module.
- To enable robot movement in forward, backward, left, and right directions.
- To develop an efficient robotic arm for object, pick and place operations.
- To interface DC motors using L293D motor driver circuits.
- To transmit live video streaming through Wi-Fi and internet connectivity.
- To provide remote monitoring and control from any location.
- To implement embedded C programming for robotic automation.
- To develop a low-cost and user-friendly surveillance robot system.
- Rechargeable Battery.
- LM2596.
- ESP32 Camera.
- Arduino Nano.
- DC Motors with L293D driver.
- Robotic ARM.
- Arduino IDE Studio Compiler for Embedded C programming.
- Express SCH for Circuit design.
 video:
video:







