HVS-1021. Joystick controlled wheel chair with Auto mode and obstacle sensor
₹5,500.00
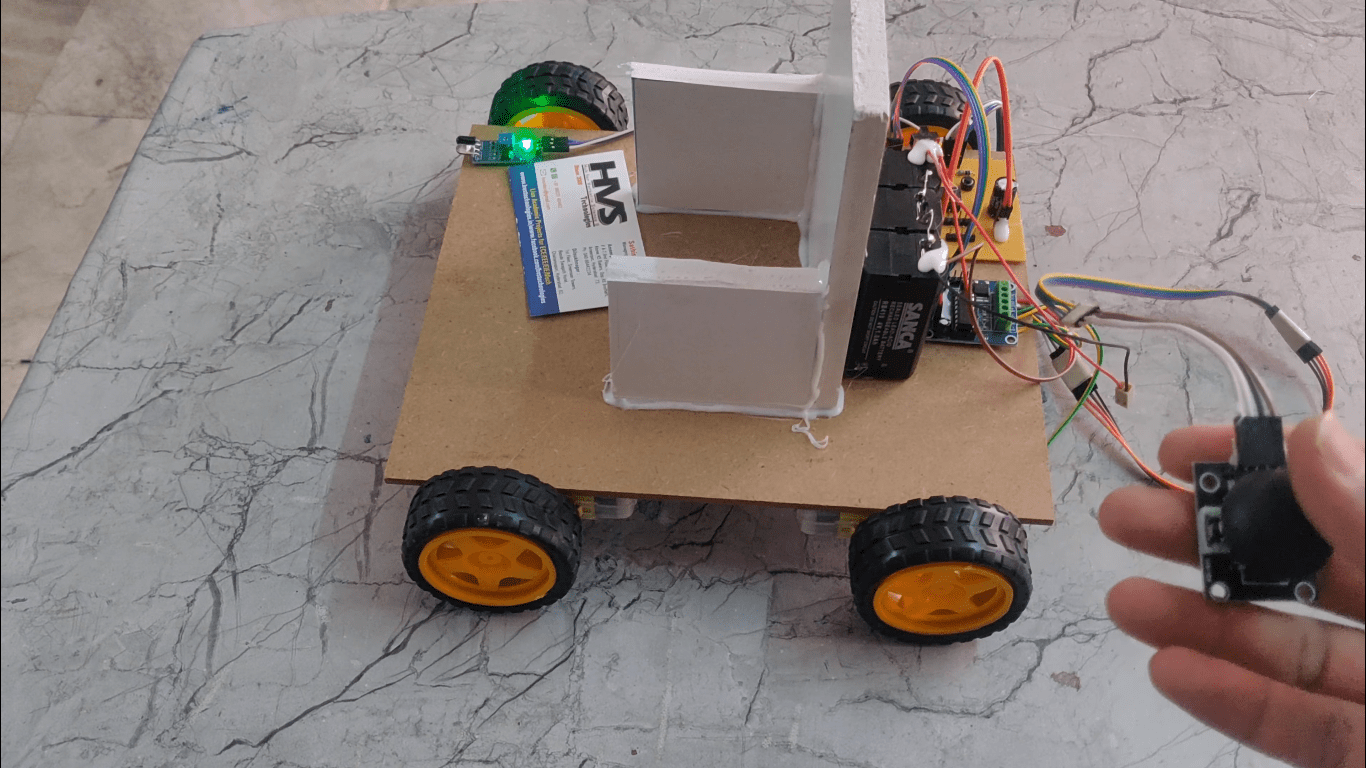
The purpose of this project is to control a wheel chair using joystick with IR obstacle Sensor. The obstacle detection mechanism is done by an IR obstacle sensor that makes uses of IR rays to find the presence of an obstacle in its path.
The purpose of this project is to control a wheel chair using joystick with IR obstacle Sensor. The obstacle detection mechanism is done by an IR obstacle sensor that makes uses of IR rays to find the presence of an obstacle in its path.
For handicapped people human found a wheel chair which can be moved by using hands for those who don’t have legs. But the peoples who don’t have legs as well as hands cannot move their wheel chair self. They need some other person to move their wheel chair. But sometimes such person faces so many problems if they didn’t get any person to move their wheel chair.
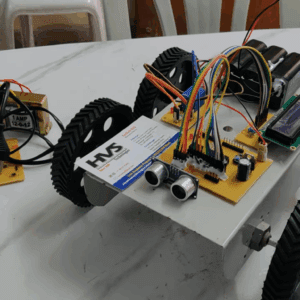
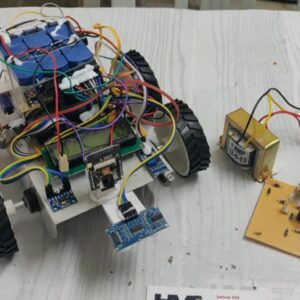
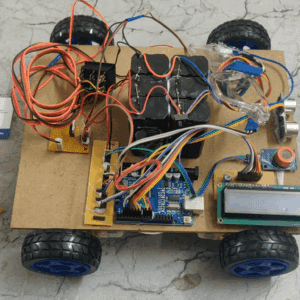
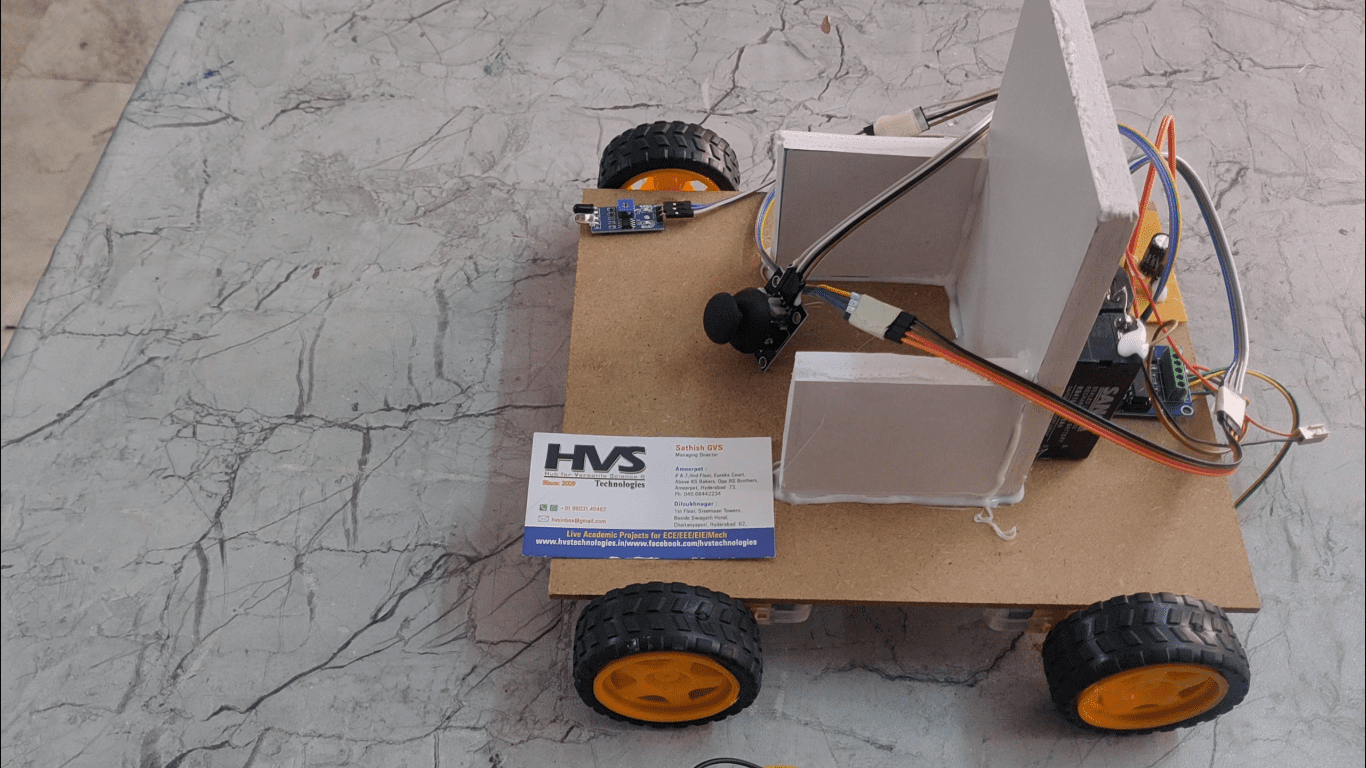
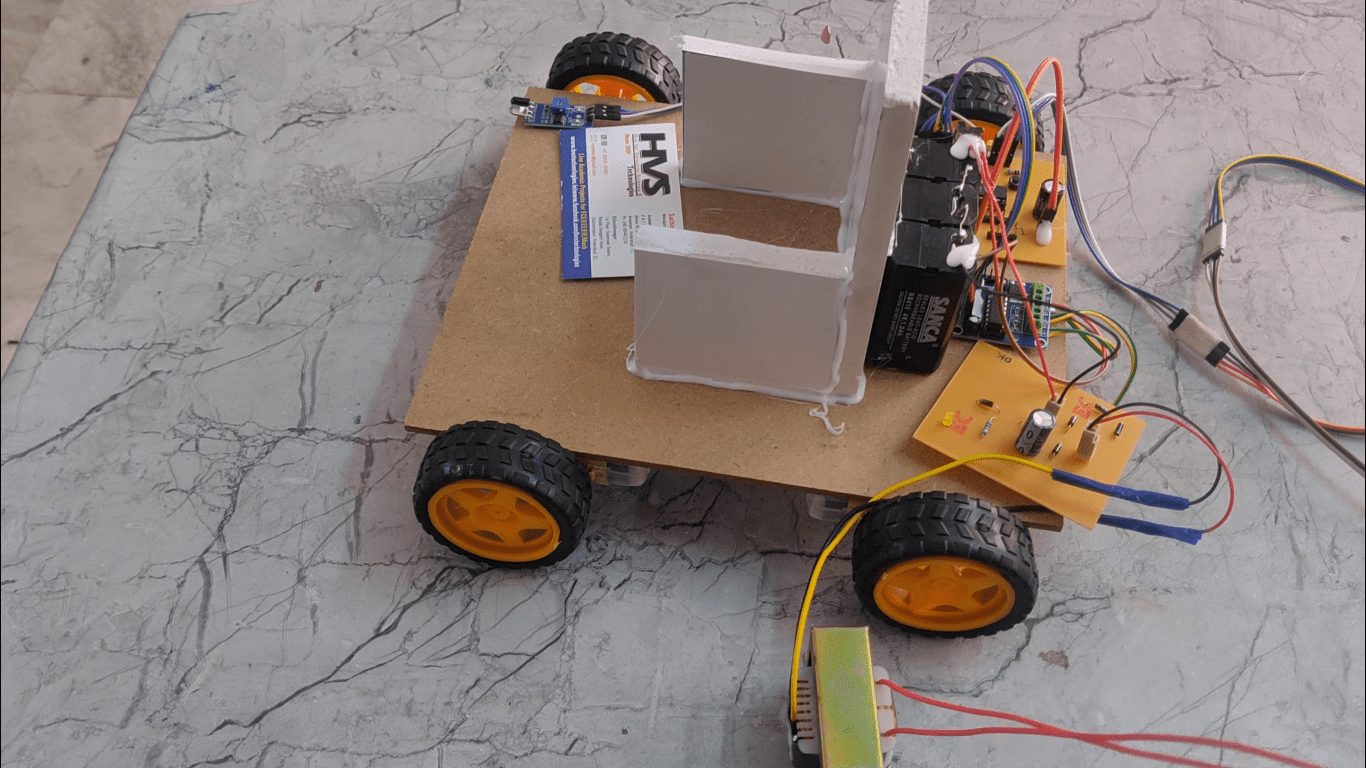
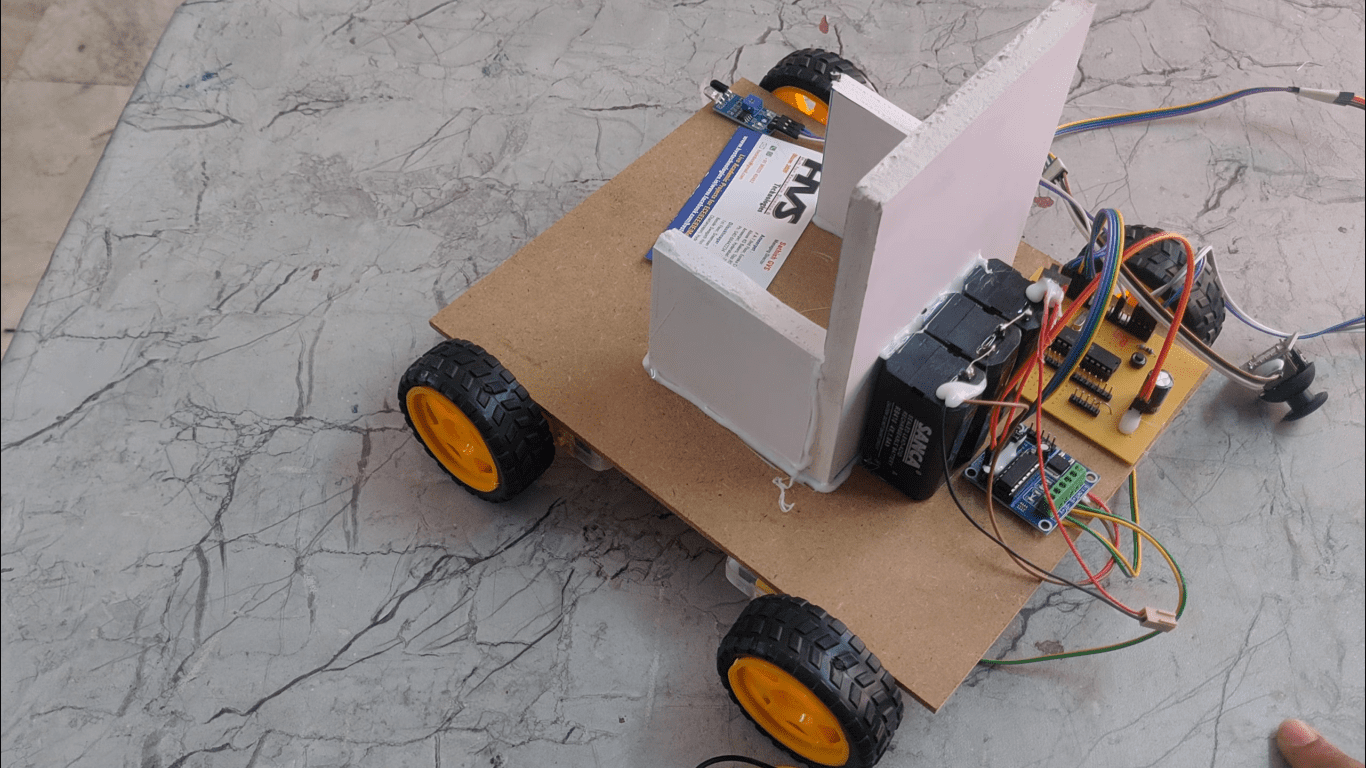
This project is on automatic wheelchair for physically disabled people. It consists of a Microcontroller based control system, battery powered DC motors, Joy stick and IR obstacle Sensor. This autonomous wheel chair senses the obstacles in its path by continuously transmitting the IR rays. If any obstacle comes in its vicinity, then the IR rays gets reflected back to the wheel chair. The IR obstacle receiver fitted on the wheel chair senses these IR obstacle rays and this information is passed onto the Microcontroller. Now the Microcontroller takes necessary action like taking the diversion, reversing the wheel chair direction etc.
The controlling device of the whole unit is a Microcontroller to which input and output modules are interfaced. The Microcontroller is programmed in Embedded C language which intelligently performs the specific task. Here, the Microcontroller gets input from the IR obstacle sensor attached to the wheel chair. This input is processed by controller and acts appropriately on the motors of the wheel chair.
Features of the project:
Ease in understanding the working module.
Easy to Operate.
Can be easily monitored
Automatic identification using IR sensor
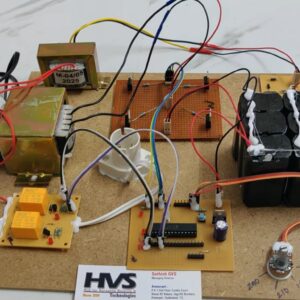
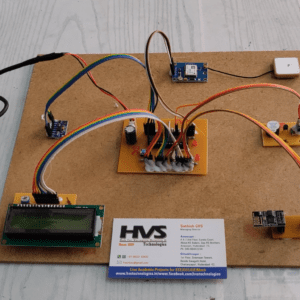
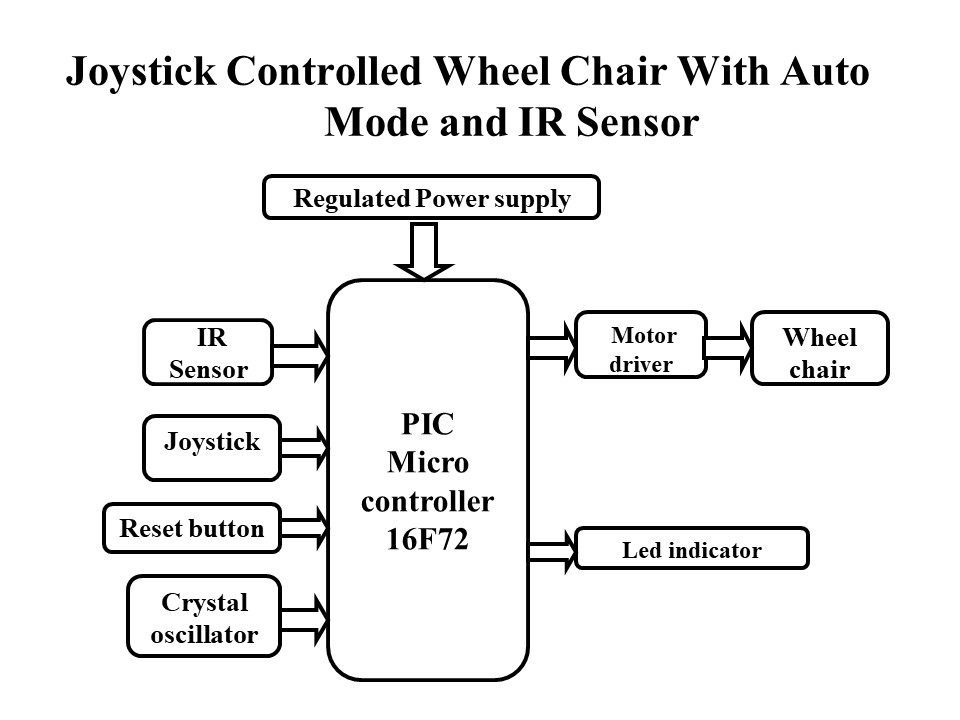
Main Blocks:
Battery Power Supply.
PIC Microcontroller.
Joystick.
IR Sensor.
Crystal oscillator.
Reset.
DC motors with driver.
LED indicators.
Software’s used:
PIC-C compiler for Embedded C programming.
PIC kit 2 programmer for dumping code into Micro controller.
 1 × ₹9,000.00
1 × ₹9,000.00


 video:
video: