HVS-2885.Arduino Ant Hexa Robot - Walking Spider Robot
₹39,000.00
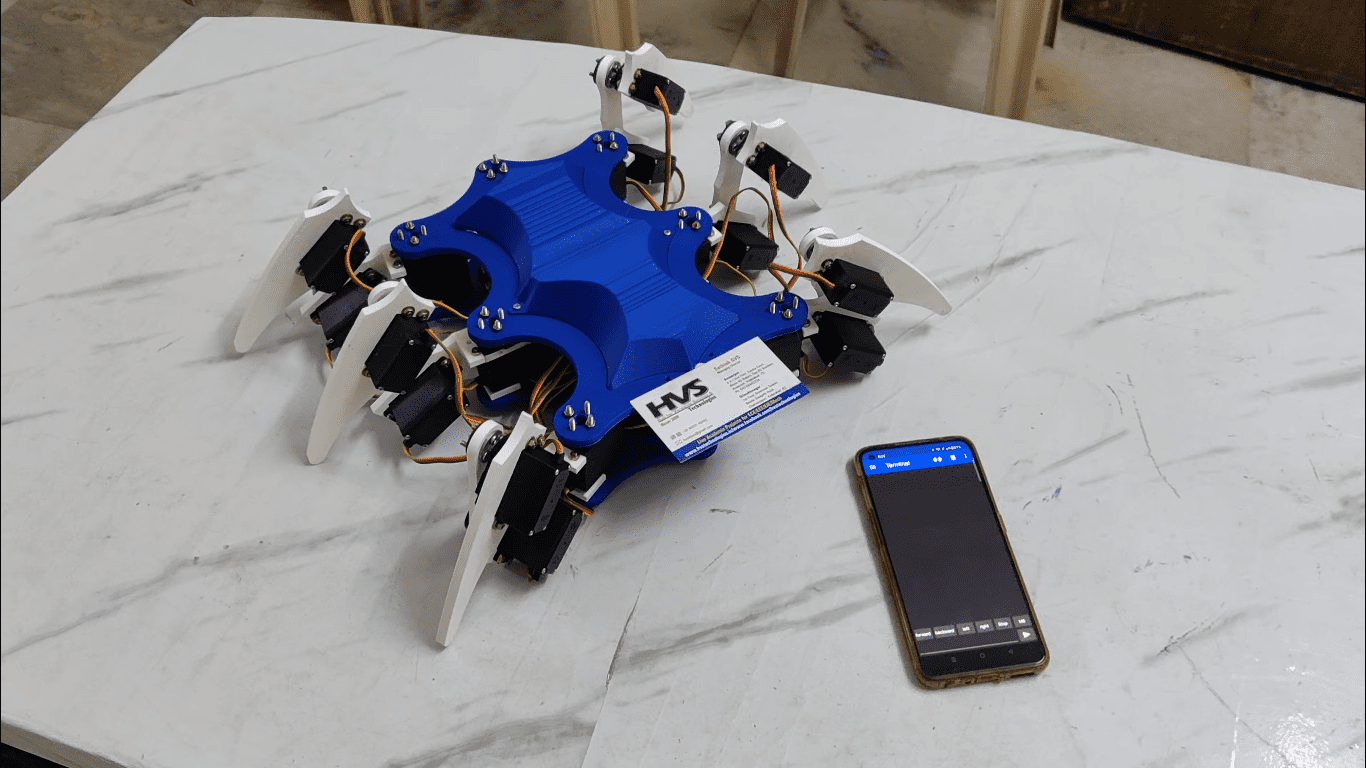
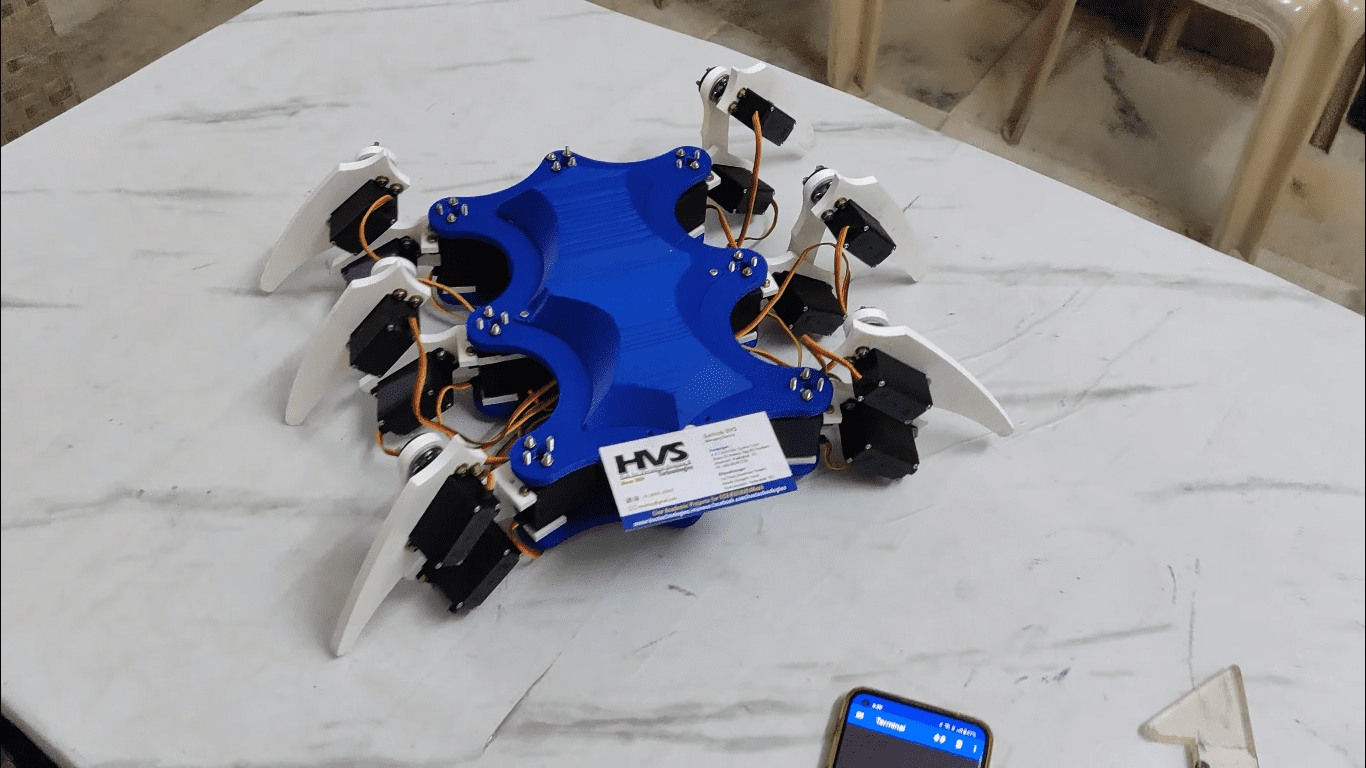
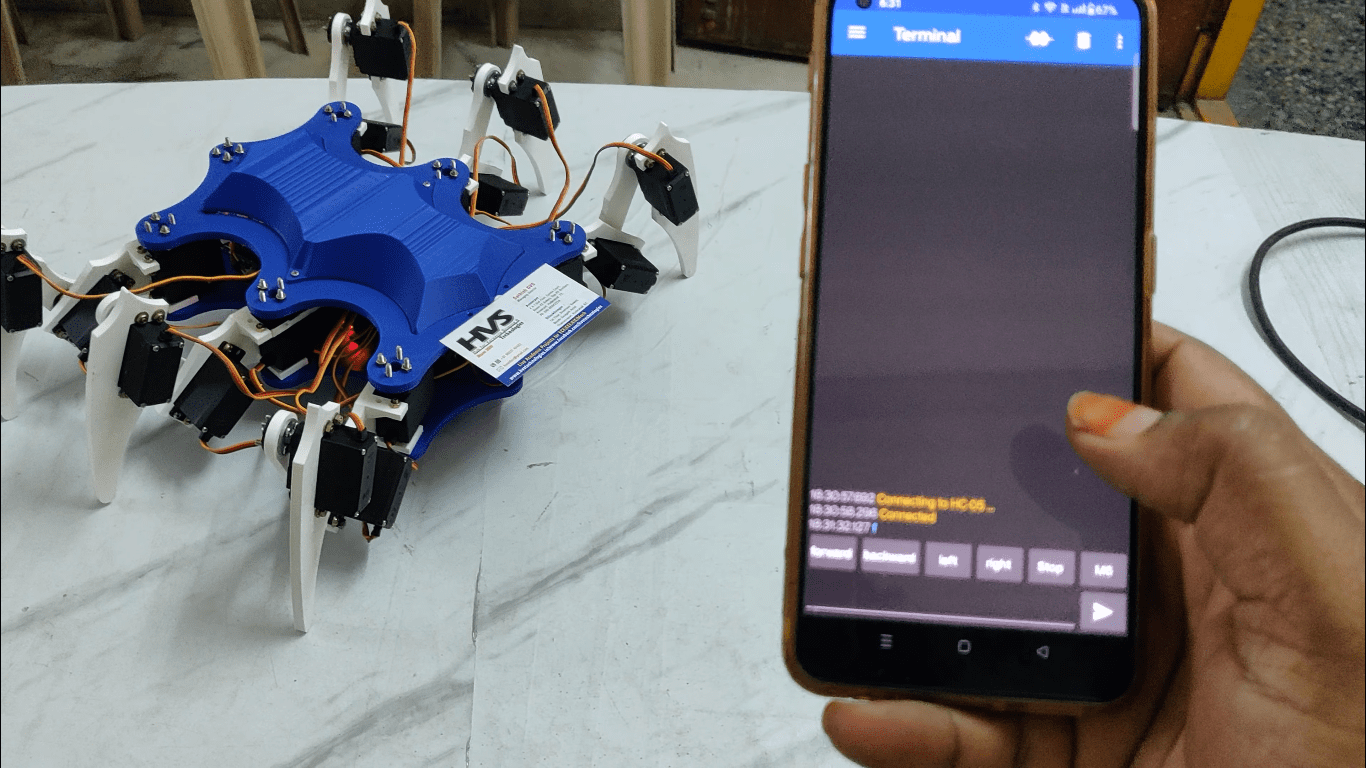
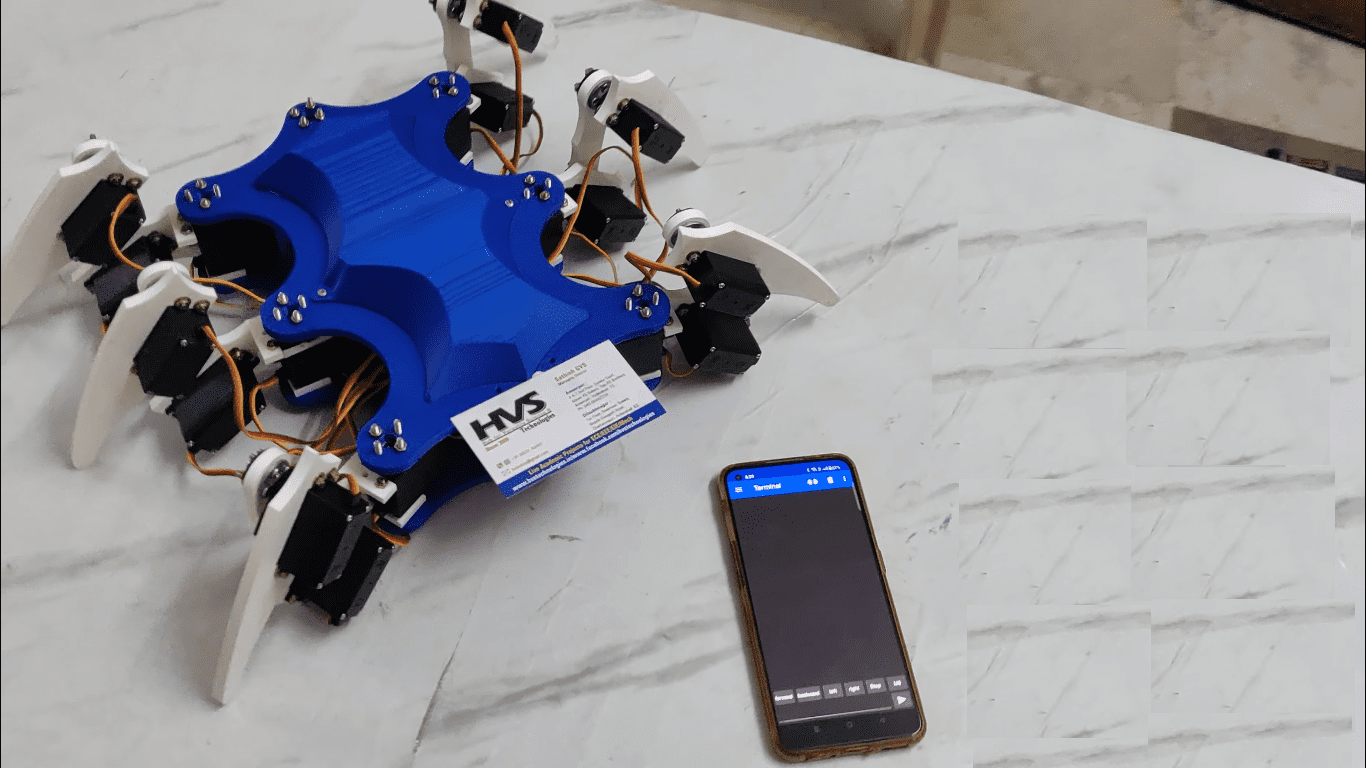
This project presents the design and implementation of an Arduino-based ANT Hexa Robot (Walking Spider Robot) that can move like an insect using six legs. The robot is controlled wirelessly through an Android mobile application using the HC-05 Bluetooth module, enabling smooth and user-friendly operation.
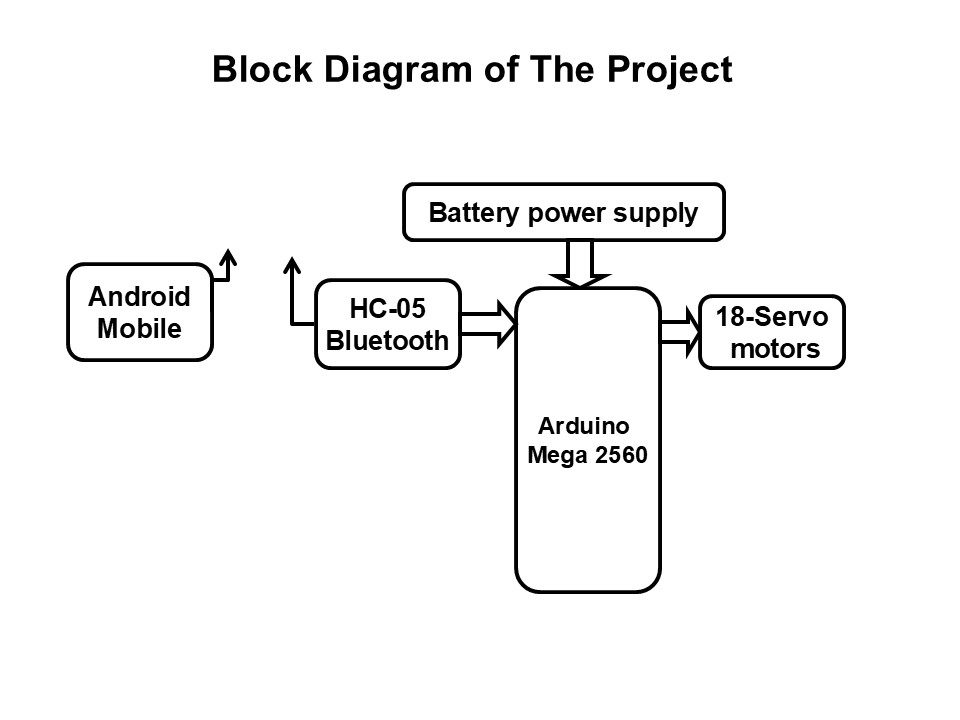
This project presents the design and implementation of an Arduino-based ANT Hexa Robot (Walking Spider Robot) that can move like an insect using six legs. The robot is controlled wirelessly through an Android mobile application using the HC-05 Bluetooth module, enabling smooth and user-friendly operation. The core controller of the system is the Arduino Mega 2560, which processes control commands received from the mobile phone and generates accurate signals to drive multiple servo motors.
The robot uses 18 servo motors (3 servos for each leg) to perform realistic walking movements such as forward, backward, left turn, right turn, and stop. A dedicated servo motor driver is used to supply required current and improve stable motor operation. The complete system is powered using a rechargeable Li-ion battery, making the robot portable and suitable for outdoor and indoor use.
The main purpose of this project is to demonstrate multi-legged robotic locomotion with wireless control, making it useful for applications such as surveillance, obstacle navigation research, rescue missions, exploration in narrow areas, and robotic learning platforms. The proposed system is compact, efficient, and provides a strong base for future upgrades like sensors, autonomous navigation, and camera support.
The Major Building blocks of this project are:
LI-ION BATTERY.
Arduino MEGA2560.
18-Servo motors.
HC-05 Bluetooth module.
Software’s used:
Arduino IDE for compiling and dumping code into Microcontroller
 1 × ₹12,500.00
1 × ₹12,500.00 1 × ₹8,000.00
1 × ₹8,000.00



 video:
video:









