No products in the cart.


Fire accidents in residential, industrial, and commercial environments can lead to severe damage to property and human life. To minimize these risks, this project presents a Fire Fighting Robot with Live Video Surveillance using ESP32-CAM in Auto/Manual Mode. The robot is designed to detect fire, transmit live video, and extinguish flames while allowing both autonomous and remote operation.
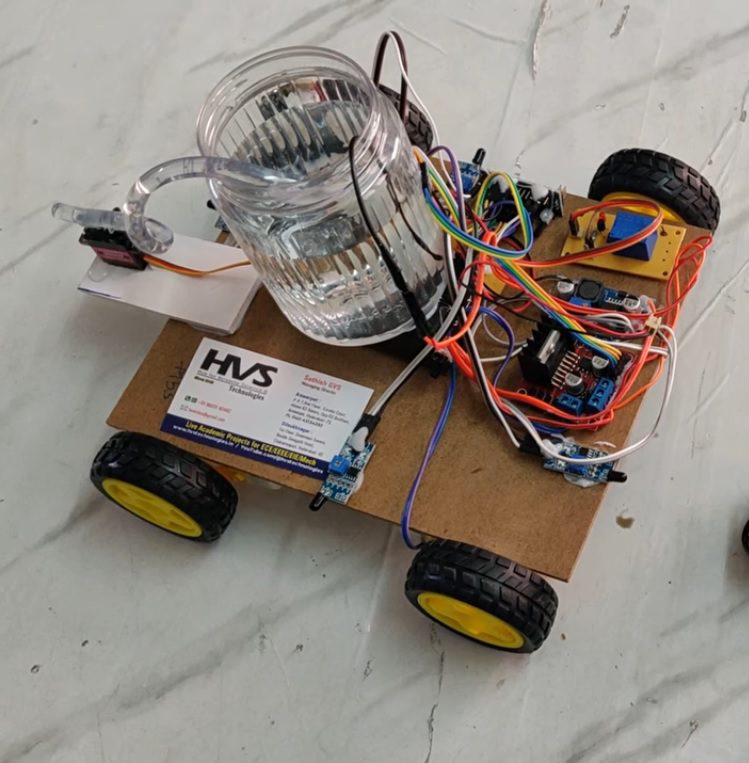
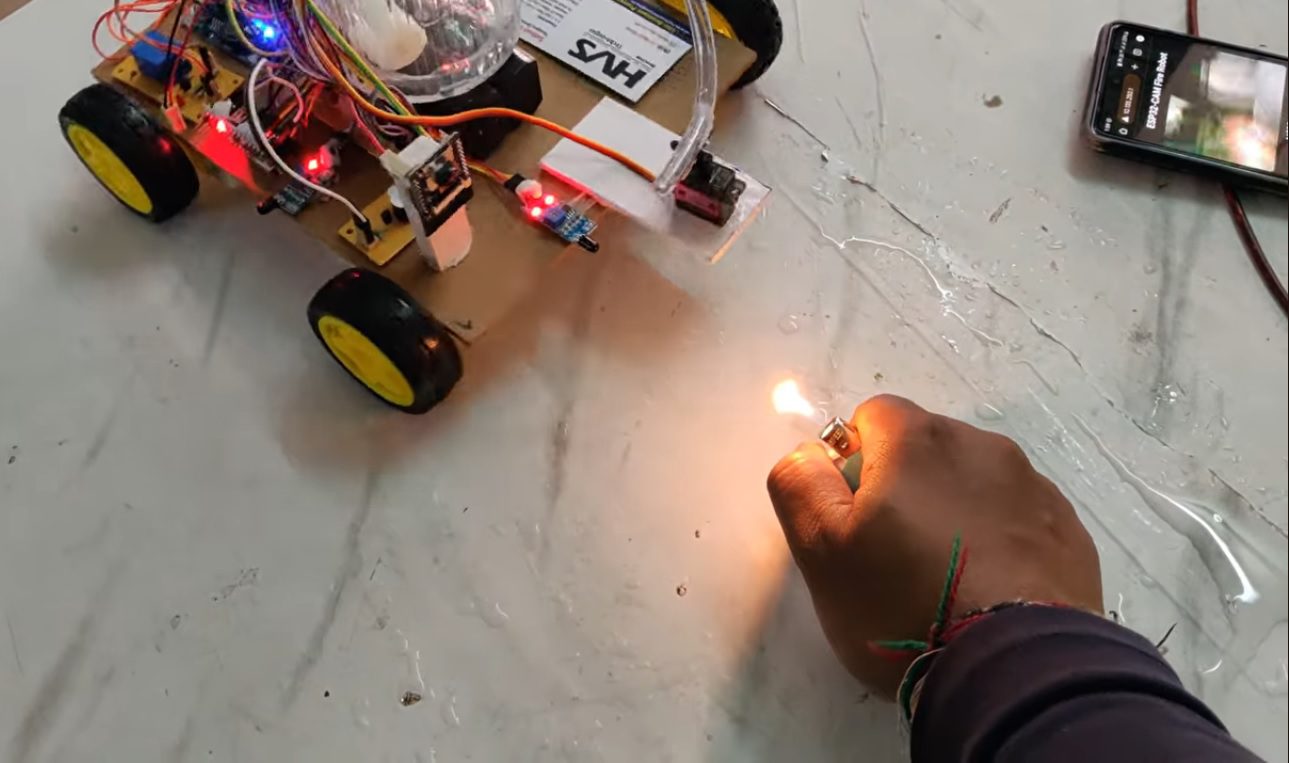
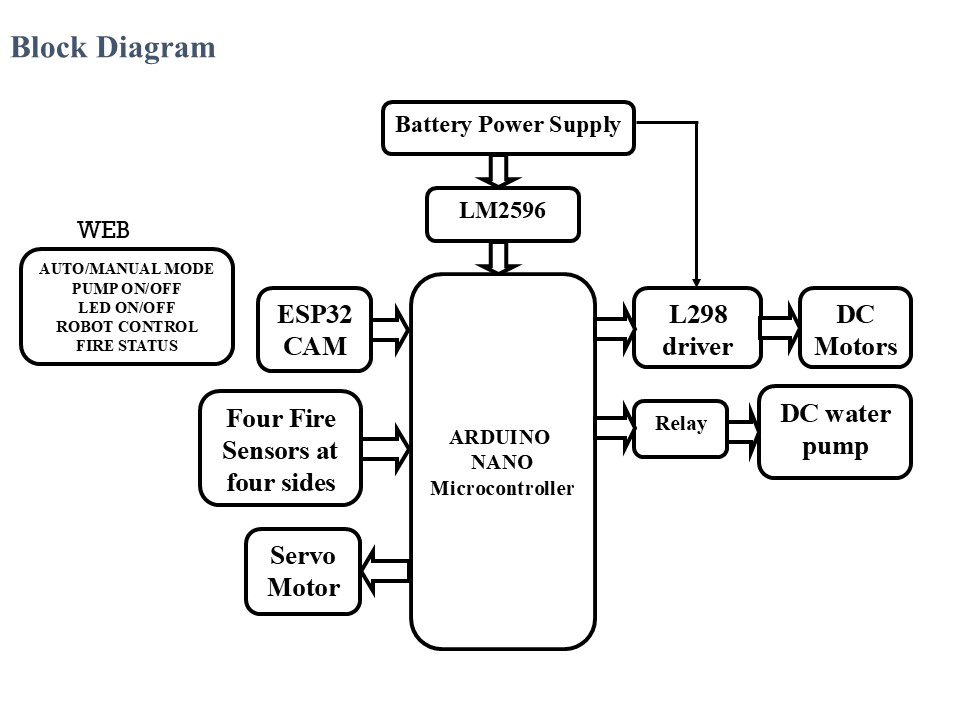
The system is built around an Arduino Nano microcontroller, which continuously monitors four flame sensors positioned on all sides of the robot for 360-degree fire detection. In Auto Mode, the robot automatically moves toward the detected fire using DC motors driven by an L298 motor driver. A servo motor adjusts the direction of the water nozzle, and a relay-controlled DC water pump sprays water to extinguish the fire. Once the fire is extinguished, the robot resumes monitoring for further fire incidents.
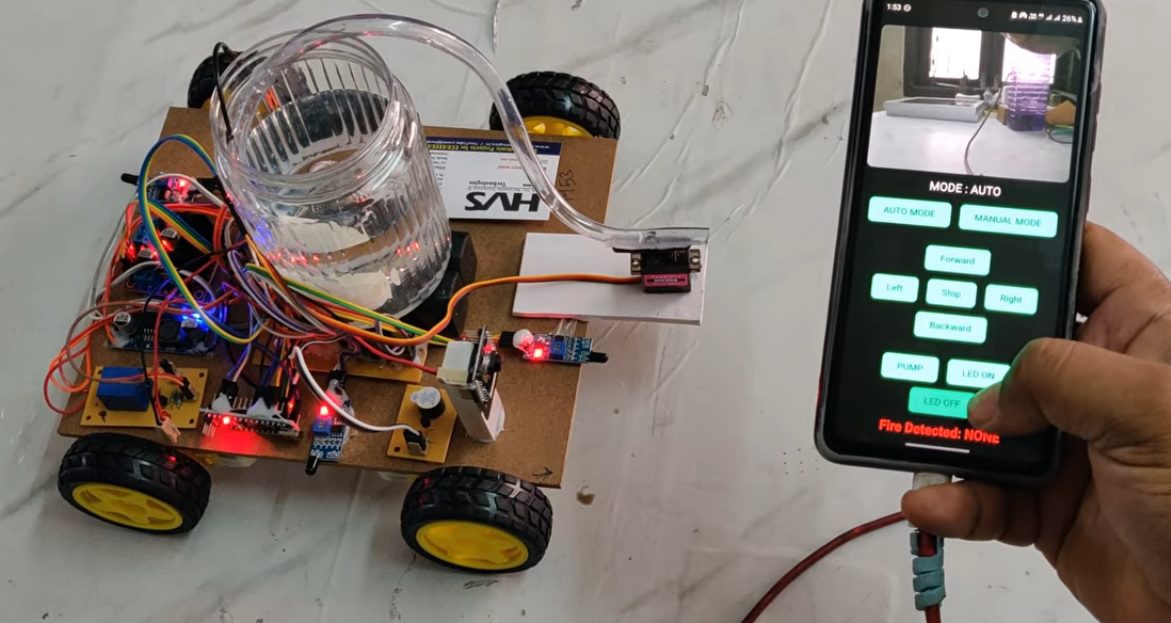
In Manual Mode, the robot is controlled through a web interface, enabling the user to move the robot, switch between Auto and Manual modes, control the water pump, and operate additional functions remotely. An ESP32-CAM module provides real-time live video streaming, allowing the operator to monitor the environment and accurately navigate the robot in hazardous areas. The system is powered by a rechargeable battery with an LM2596 voltage regulator to provide stable power to all modules.
The proposed robot offers a cost-effective, reliable, and intelligent fire safety solution by combining autonomous fire detection, wireless remote control, and live video surveillance. It is suitable for applications in homes, offices, warehouses, laboratories, industrial plants, and other hazardous environments where quick fire detection and response are essential.
Objectives:
 video:
video:
- To design and develop an intelligent fire-fighting robot capable of detecting and extinguishing fire automatically.
- To implement Auto and Manual operation modes for flexible robot control.
- To detect fire from all directions using four flame sensors for faster response.
- To provide live video surveillance using the ESP32-CAM for real-time remote monitoring.
- To enable wireless robot control through a web-based interface.
- To control the movement of the robot using DC motors driven by an L298 motor driver.
- To operate a servo-controlled water nozzle for accurate water spraying.
- To activate a DC water pump automatically or manually for fire extinguishing.
- To develop a compact, low-cost, and reliable fire safety system for homes, industries, offices, and hazardous environments.
- To improve firefighter safety by allowing remote operation in dangerous fire situations.
- Battery power supply.
- LM2596.
- ESP32 CAM.
- Arduino NANO.
- Relay.
- DC Water motor.
- Four Flame sensors.
- Servo motor.
- Embedded C programming.
- Arduino IDE for dumping code into Micro controller.
- Express SCH for Circuit design.
- WEB Technology.
 video:
video:







