No products in the cart.


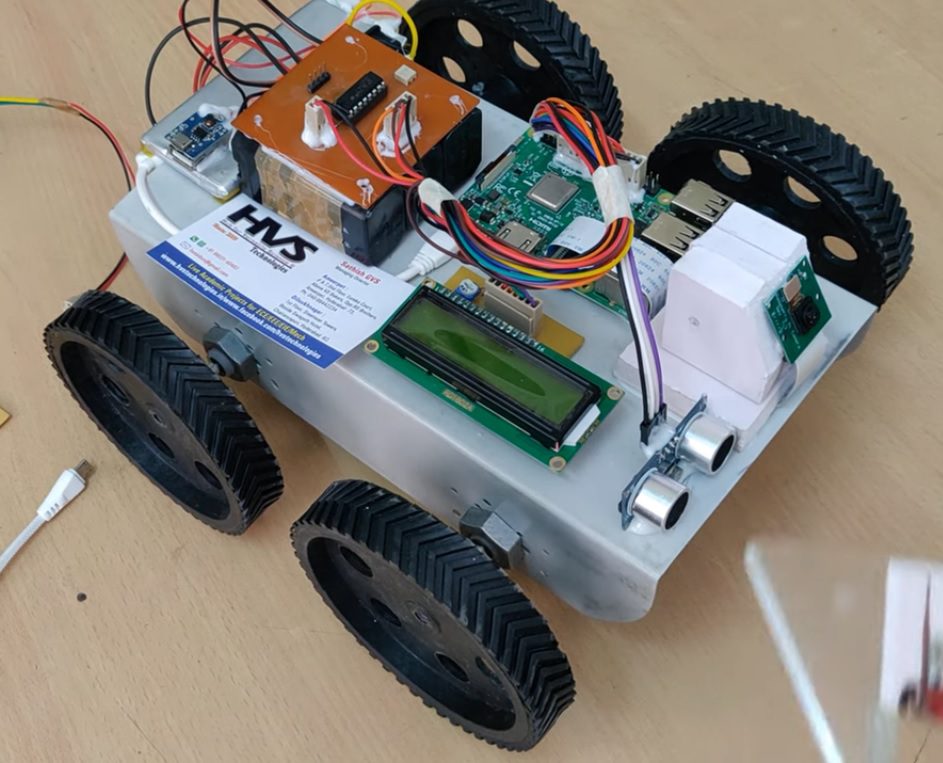


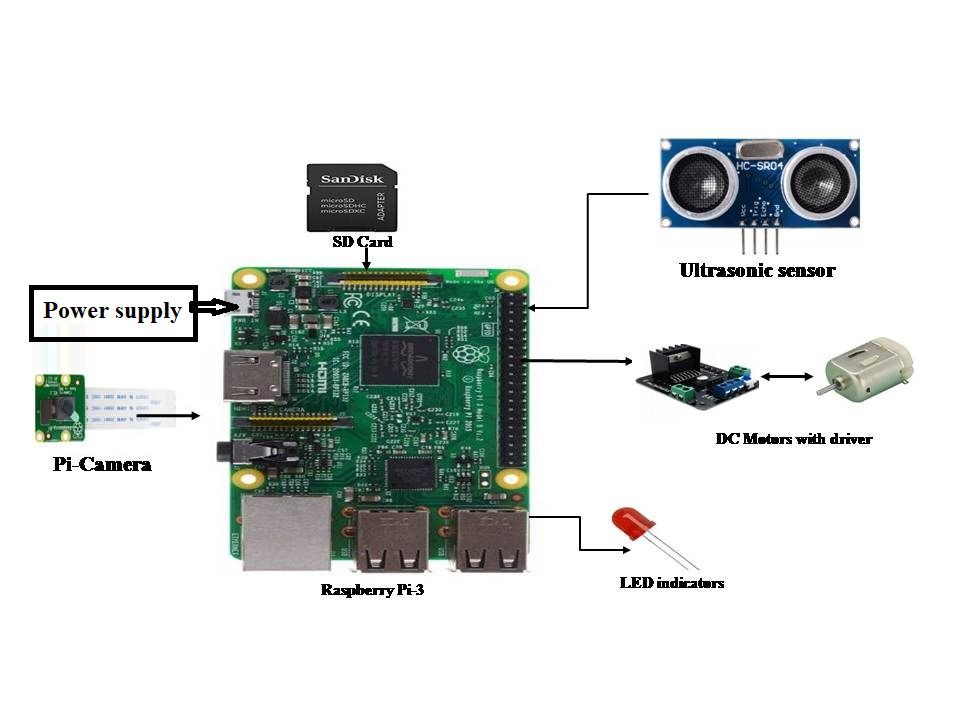
Robotic technology plays a vital role in today's world, where intelligent systems are increasingly required to interact and coexist with humans. This project presents an AI-Based Human Following Robot with Live Video Monitoring using a Raspberry Pi. The system consists of a Raspberry Pi 3, Pi Camera, Ultrasonic Sensor, DC Motors, and a Motor Driver. The robot is powered by a 12V battery, while the Raspberry Pi receives power from a 5V power bank.
The Pi Camera continuously captures video frames, which are processed by the Raspberry Pi using computer vision and AI algorithms to detect and track a human target. When a person is detected, a bounding box is displayed around the person on a live monitoring webpage, indicating successful detection and tracking. Based on the person's position in the camera frame, the Raspberry Pi controls the robot's movement, allowing it to follow the person while maintaining a safe distance.
To ensure safe navigation, an ultrasonic sensor continuously monitors the surroundings for obstacles. If an obstacle is detected within a predefined range, the Raspberry Pi automatically stops the robot to prevent collisions. The entire system is programmed in Python and provides real-time human tracking, obstacle avoidance, and live video monitoring through a web interface. This project demonstrates an intelligent robotic assistant suitable for surveillance, personal assistance, and smart automation applications.
The main objectives of the project are:
 video:
video:
To design and develop a human-following robot using Raspberry Pi and AI-based vision techniques.
To detect and track a person in real time using a Pi Camera and computer vision algorithms.
To automatically control robot movement based on the detected person's position.
To maintain a safe distance between the robot and the person while following.
To detect and avoid obstacles using an ultrasonic sensor for safe navigation.
To provide live video monitoring through a webpage for remote observation.
To display a bounding box around the detected person for visual confirmation of tracking.
To implement intelligent decision-making using Python programming on Raspberry Pi.
To improve human-robot interaction through autonomous and responsive behavior.
To develop a low-cost and efficient robotic system for surveillance, assistance, and automation applications.
Components list:- 12v Rechargeable battery
- 5v Power Bank
- Raspberry pi3
- Pi camera
- Ultrasonic Sensor
- DC motors
- L293d motor driver
- Robot chaises
- Wheels
- Raspbian OS.
- Machine Learning.
 video:
video:







