No products in the cart.


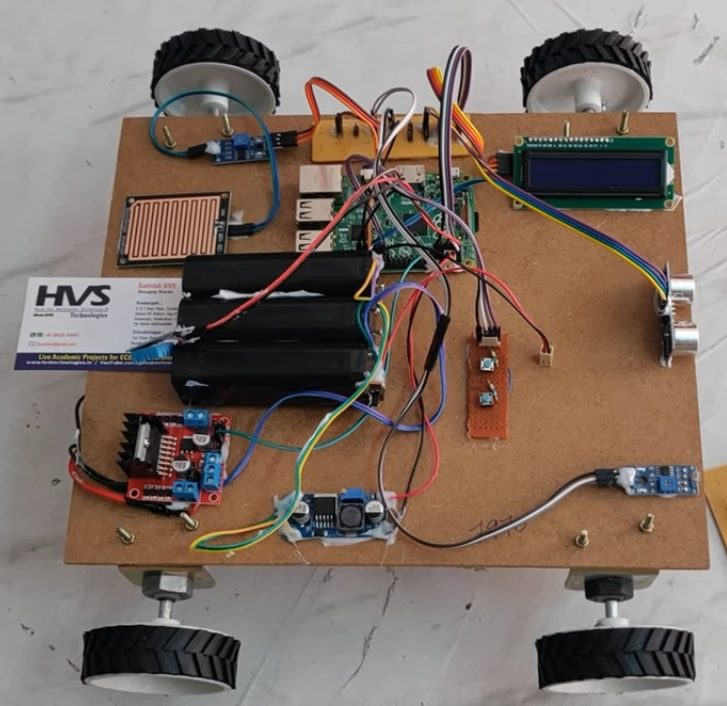
The AI-Enabled Weather Adaptive Cruise Control System for Collision Avoidance is designed to improve vehicle safety by automatically adjusting speed based on surrounding obstacles and weather conditions. The system is built around the Raspberry Pi 3 which acts as the central controller for processing sensor data and executing control decisions.
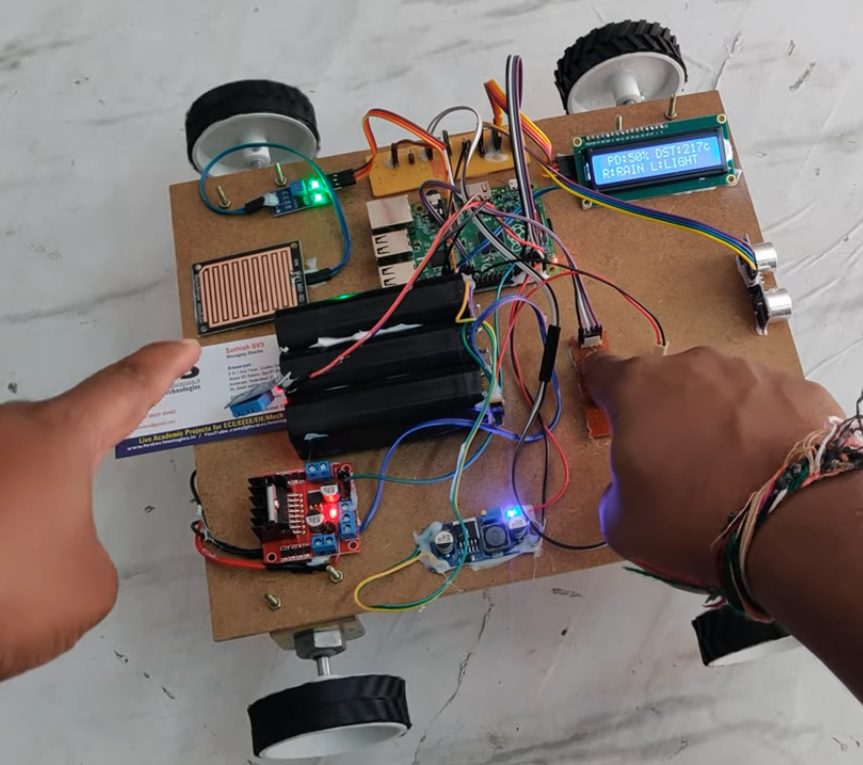
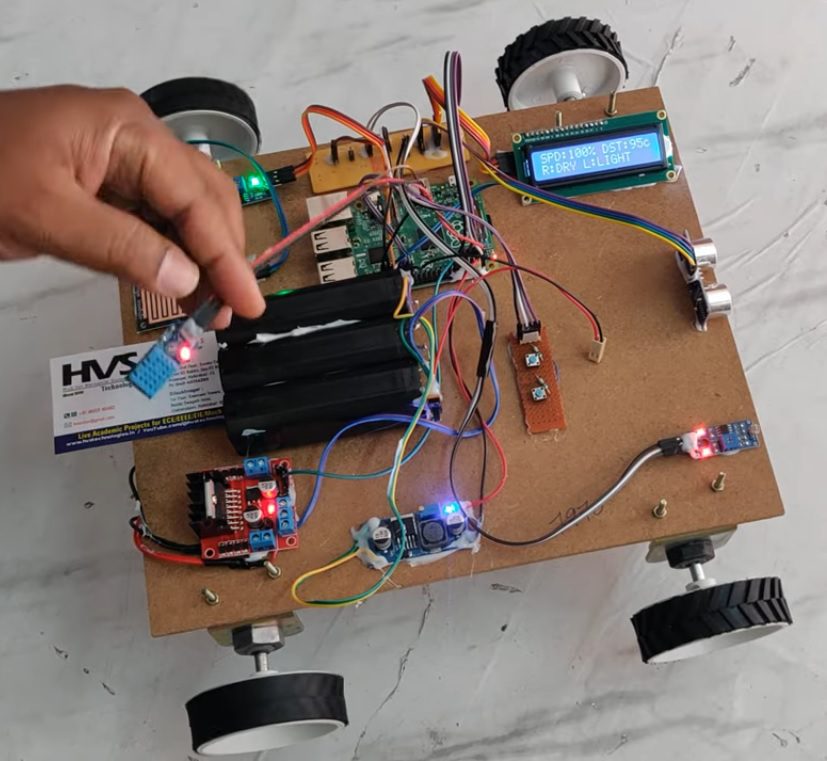
An HC-SR04 Ultrasonic Sensor is used to continuously monitor the distance between the vehicle and obstacles in front. Environmental conditions such as temperature and humidity are monitored using the DHT11 Sensor, while rain and fog sensors detect adverse weather conditions. All sensor data is processed by an AI decision module that determines the appropriate speed of the vehicle based on predefined safety rules.
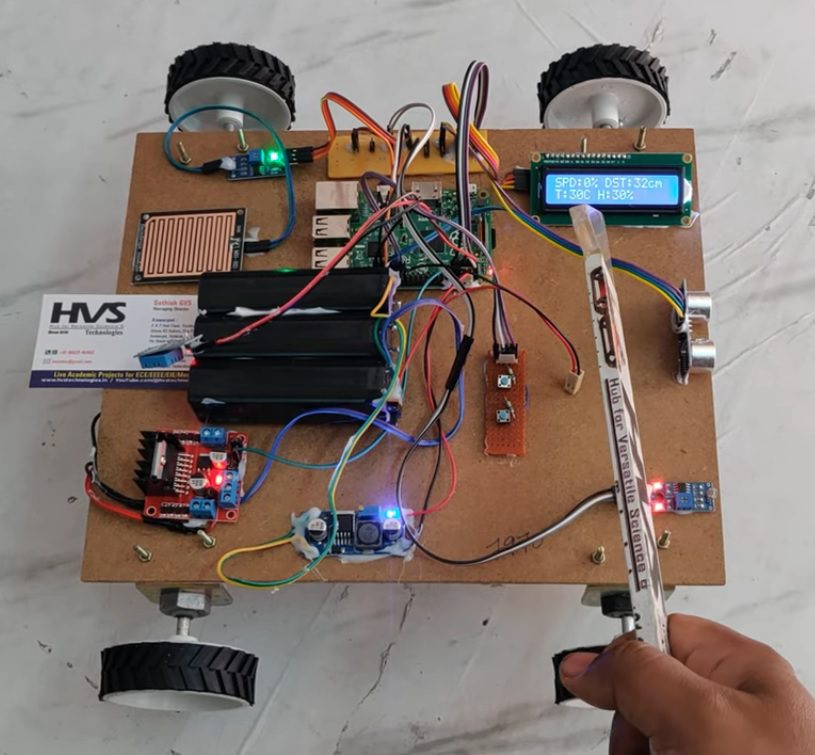
The AI module automatically adjusts the vehicle speed automatically. When rain or fog is detected, the system increases the safe following distance and reduces the vehicle speed to prevent accidents. If an obstacle is detected at a critical distance, the system immediately stops the vehicle automatically to avoid collision. Motor control is achieved using a DC motor driver that regulates the speed of the motors.
A display module provides real-time information such as obstacle distance, speed level, and weather conditions, allowing the user to monitor system status. The system also includes an SD card for data storage and buttons for basic speed control. Overall, the proposed system enhances driving safety by combining sensor-based monitoring with intelligent AI-based decision making for adaptive cruise control and automatic collision avoidance.
Objectives:
 video:
video:
To design an intelligent vehicle safety system using a Raspberry Pi 3 for controlling speed and monitoring environmental conditions.
To detect obstacles in front of the vehicle using the HC-SR04 Ultrasonic Sensor and automatically stop the vehicle to avoid collisions.
To monitor weather conditions such as temperature and humidity using the DHT11 Sensor along with rain and fog sensors.
To automatically adjust vehicle speed using an AI decision module based on predefined safety rules during rain, fog, or obstacle detection.
To provide real-time system information such as distance, speed level, and weather status on a display module.
To improve road safety by implementing automatic collision avoidance and adaptive cruise control mechanisms.
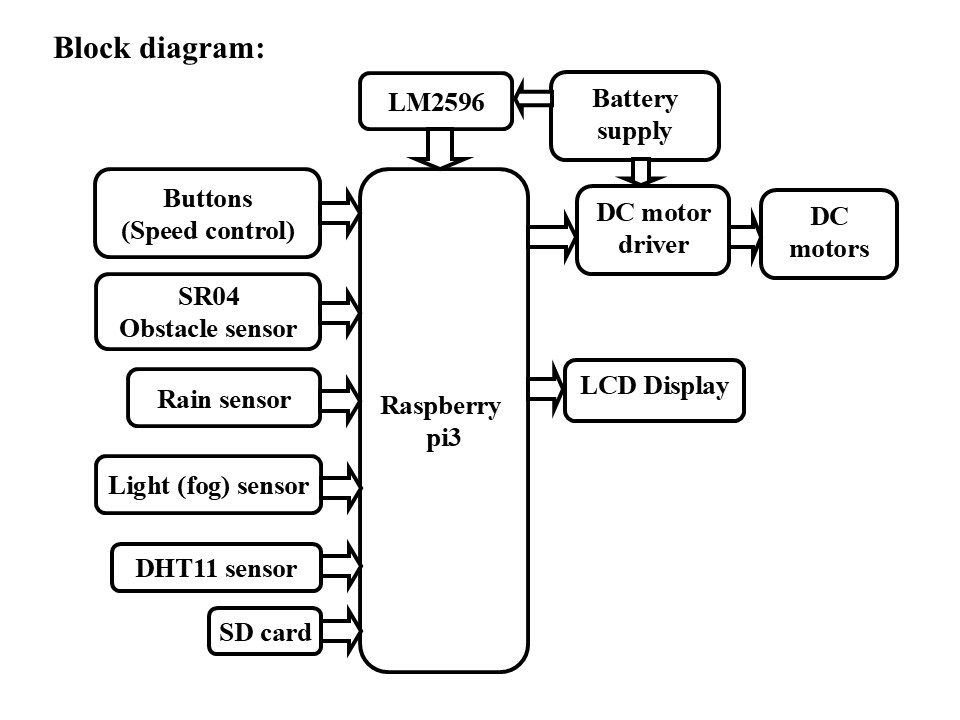
The major building blocks of the project are:- Battery power supply.
- LM2596 module.
- Raspberry pi 3.
- LCD display.
- DC motors with l293d motor driver.
- Buttons (speed control).
- SD card.
- Ultrasonic sensor.
- Rain sensor.
- DHT11 sensor.
- FOG (light) sensor.
- Python language.
- Raspbian OS.
- Express SCH for Circuit design.
- Artificial Intelligence.
 video:
video: