No products in the cart.



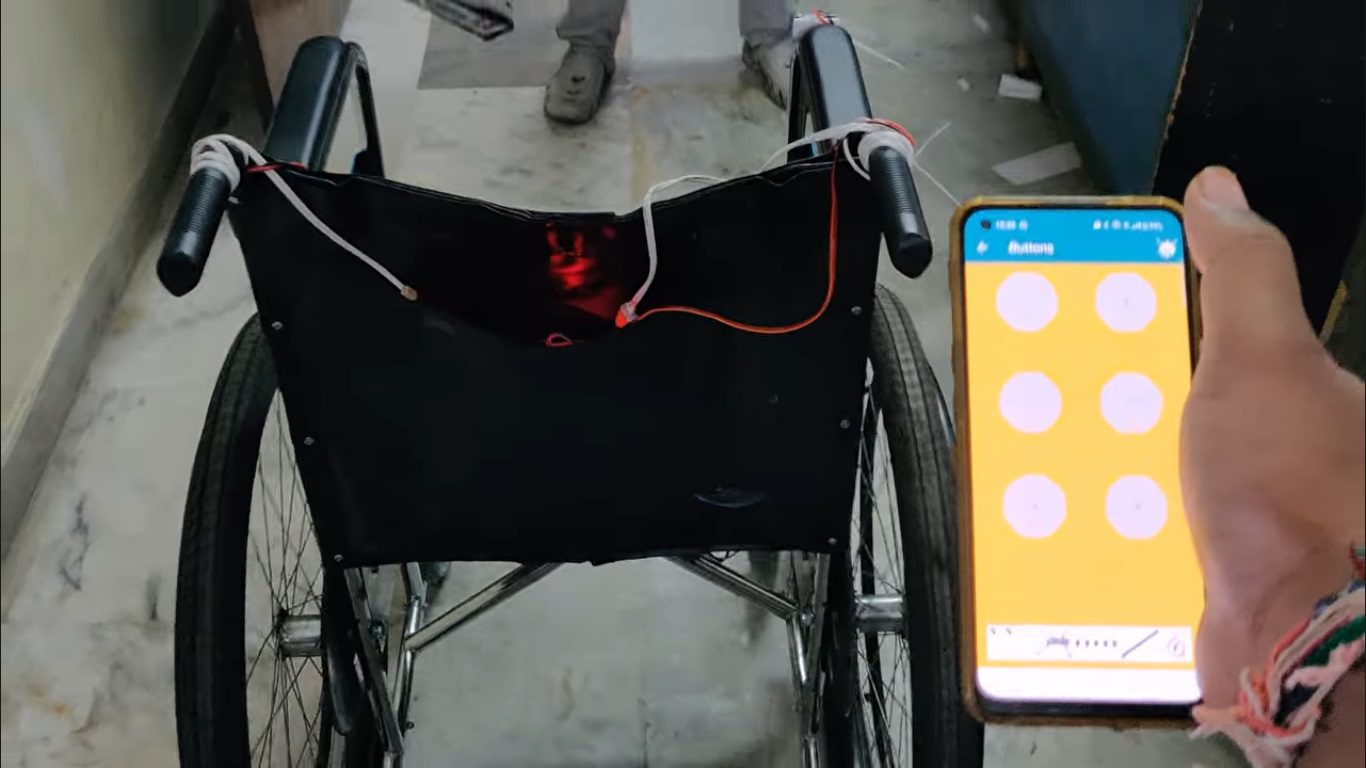
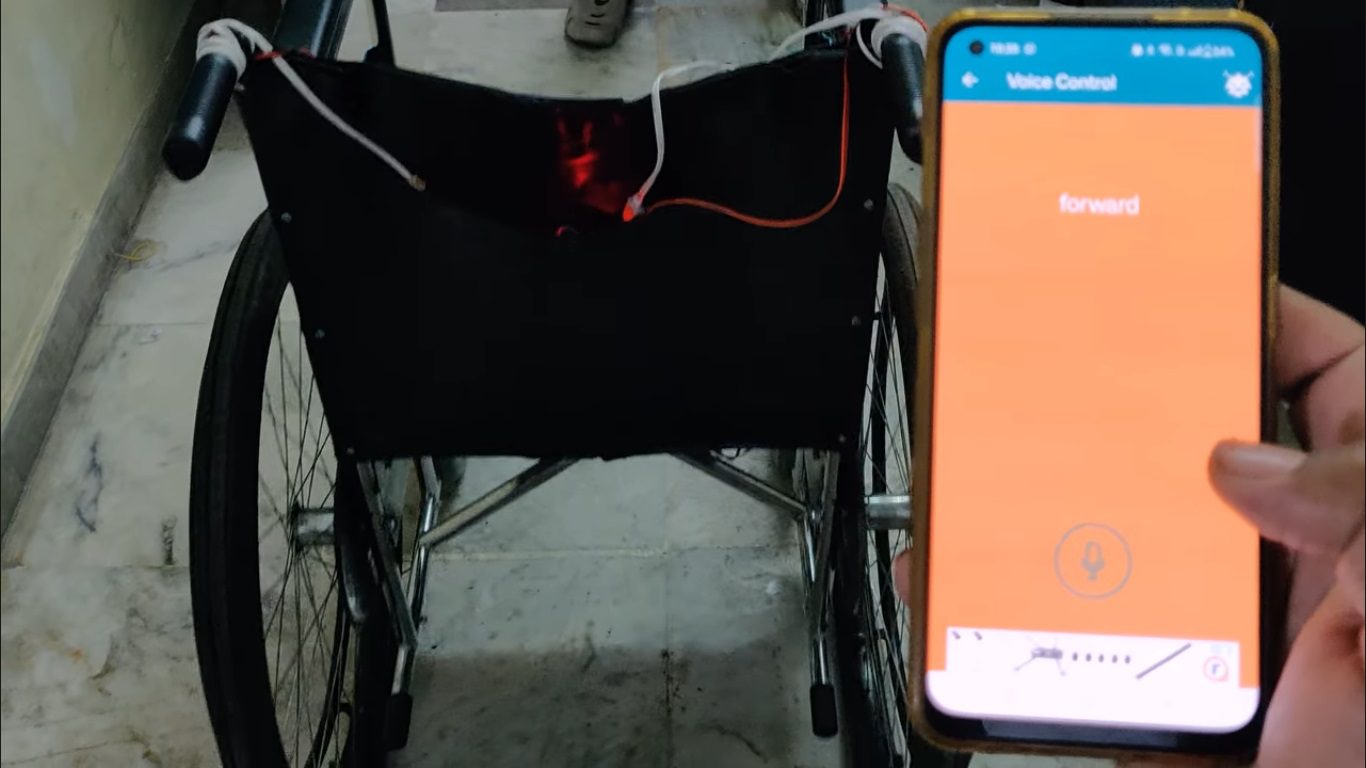
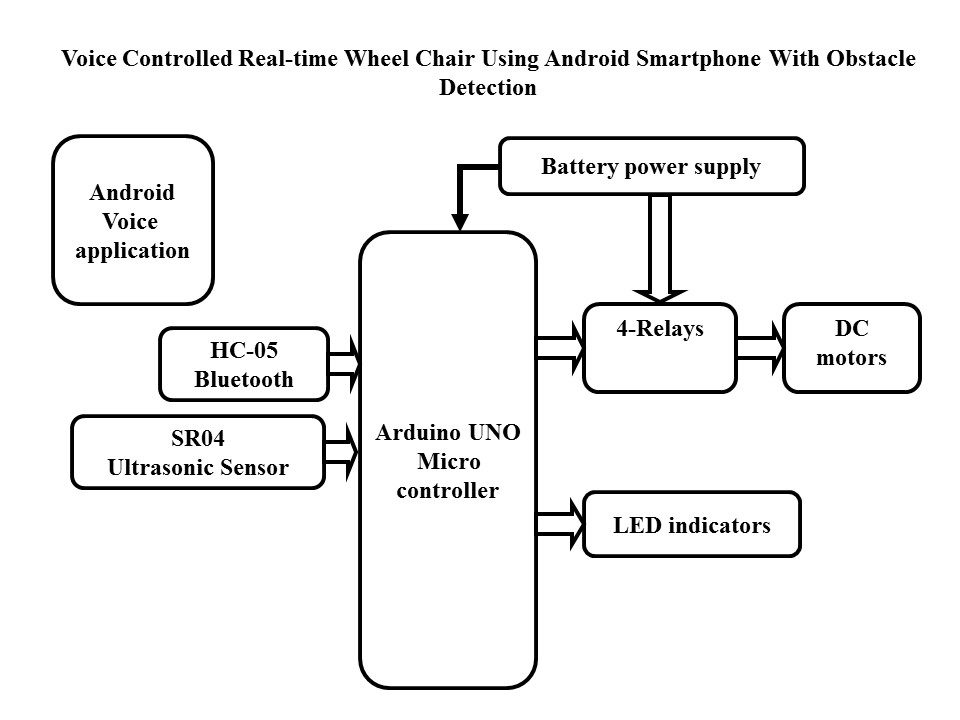
Mobility assistance is essential for physically challenged individuals, especially leg amputees and elderly people. This project presents the design and implementation of a Voice-Controlled Real-Time Wheelchair using Bluetooth communication and obstacle detection. The system allows users to control the wheelchair through Android-based voice commands, providing hands-free and convenient operation. An Arduino UNO microcontroller processes the received commands and controls DC motors through a 4-relay board. An ultrasonic sensor (SR04) is integrated to detect obstacles and automatically stop the wheelchair to ensure user safety. The system is battery-operated, cost-effective, and designed for real-time applications in healthcare and assistive technology. This project enhances independence, safety, and ease of mobility for users.
Objectives:- To design and develop a voice-controlled wheelchair system.
- To enable hands-free operation using Android-based voice commands.
- To implement Bluetooth communication for wireless control.
- To control wheelchair movement in forward, reverse, left, and right directions.
- To integrate ultrasonic obstacle detection for user safety.
- To develop a battery-operated and energy-efficient system.
- To provide a low-cost and reliable mobility solution for physically challenged individuals.
- Battery power supply.
- Arduino UNO Microcontroller.
- LED indicators.
- DC motors with Relay driver.
- HC-05 Bluetooth.
- SR04 Ultrasonic sensor.
- Embedded C programming.
- ARDUINO IDE for dumping code into Micro controller.
- Express SCH for Circuit design.
 video:
video: