HVS-4862. MATLAB GUI Wireless Controlled Pick and Place Robotic ARM.
₹18,000.00
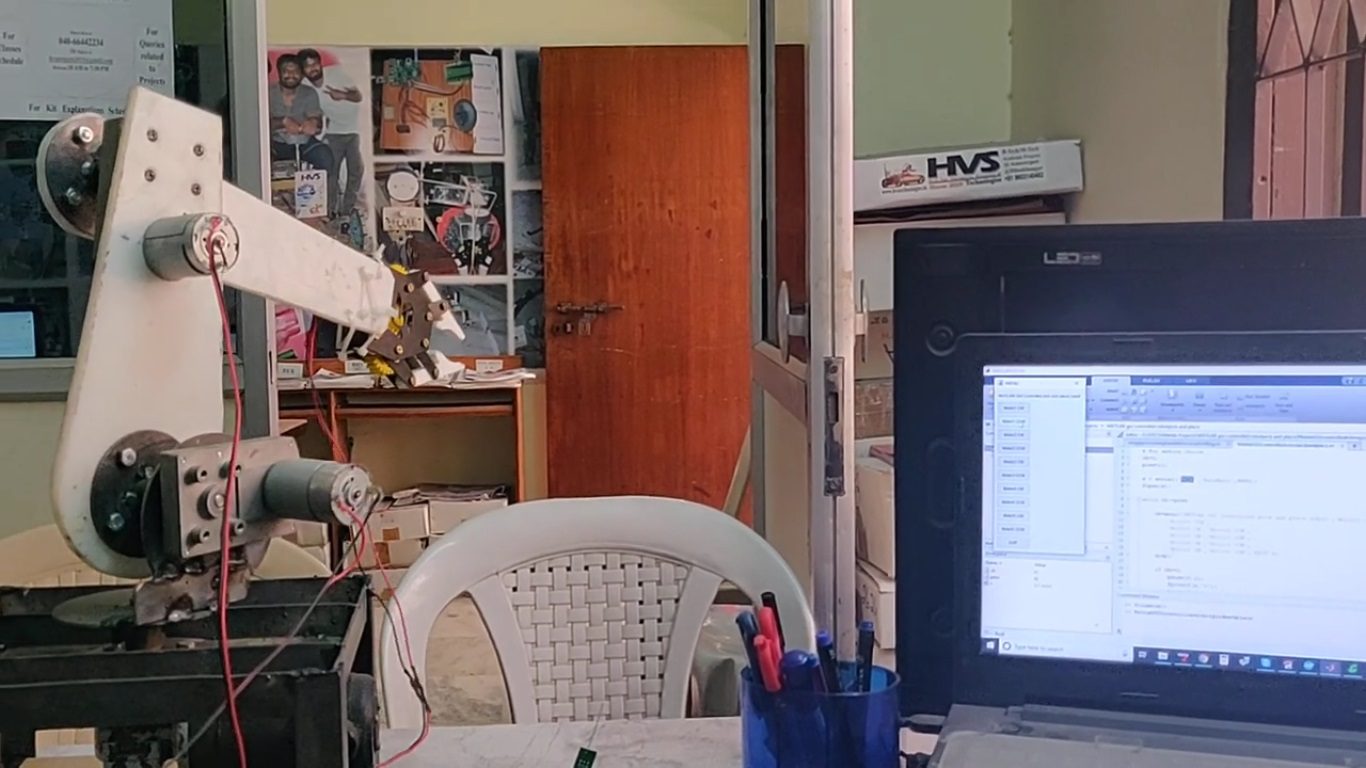
The MATLAB GUI Wireless Controlled Pick and Place Robotic Arm is an intelligent automation system designed to perform object handling operations through wireless communication.
The MATLAB GUI Wireless Controlled Pick and Place Robotic Arm is an intelligent automation system designed to perform object handling operations through wireless communication. The system consists of a PC-based MATLAB Graphical User Interface (GUI), ZigBee wireless modules, a PIC microcontroller, relay drivers, and DC motor-driven robotic arm mechanisms. The primary objective of the project is to enable remote control of a robotic arm for pick-and-place applications in industrial, laboratory, and material-handling environments.
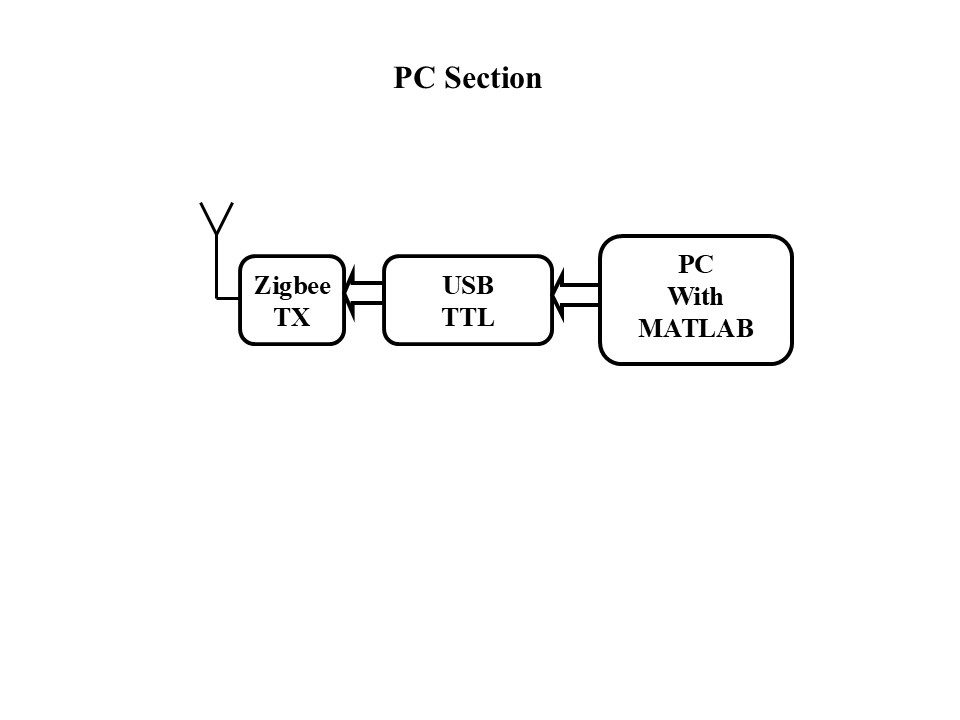
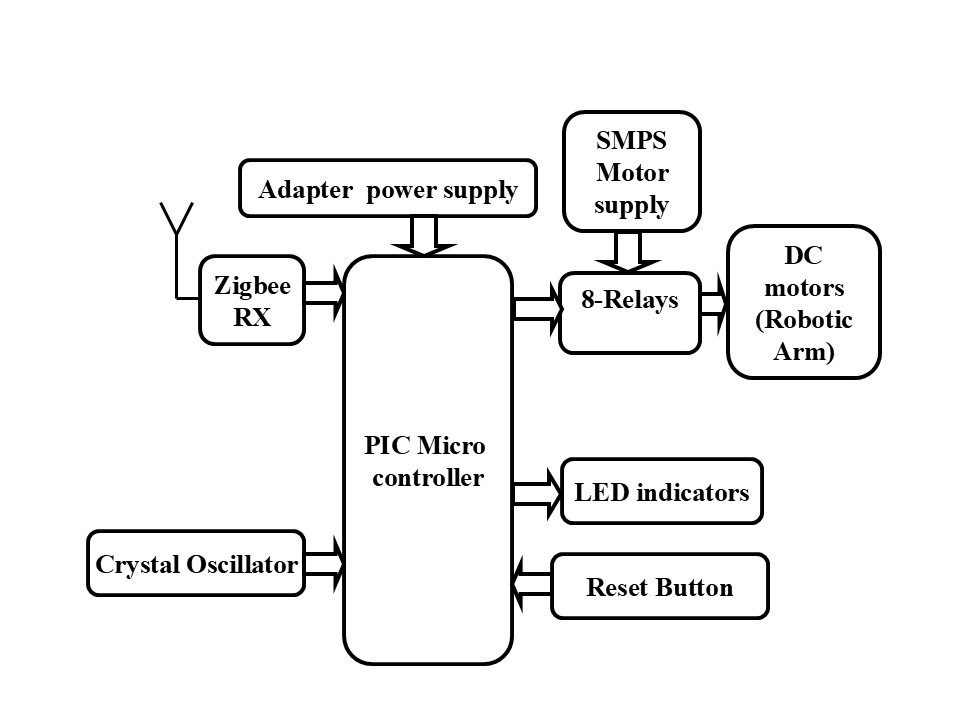
In this system, the operator provides movement commands through a MATLAB GUI running on a personal computer. The commands are transmitted wirelessly using a ZigBee transmitter module connected to the PC through a USB-to-TTL interface. The transmitted data is received by a ZigBee receiver module connected to the PIC microcontroller in the robotic section. Based on the received commands, the microcontroller controls the relay modules, which drive the DC motors responsible for the movement of the robotic arm joints and gripper mechanism.
The robotic arm performs various operations such as arm rotation, lifting, lowering, gripping, and releasing objects according to the commands received from the MATLAB GUI. LED indicators provide system status information, while a crystal oscillator ensures accurate microcontroller timing and operation. The wireless architecture eliminates the need for physical control cables, increasing flexibility and ease of operation.
The developed system provides a cost-effective, reliable, and user-friendly solution for wireless robotic manipulation. It demonstrates the integration of MATLAB-based control, ZigBee wireless communication, embedded systems, and robotic automation, making it suitable for industrial automation, hazardous environment handling, educational robotics, and research applications.
Objectives
To design and develop a wireless pick-and-place robotic arm for automated object handling applications.
To create a MATLAB-based Graphical User Interface (GUI) for easy and user-friendly control of the robotic arm.
To establish wireless communication using ZigBee modules between the PC and the robotic arm.
To control multiple DC motors through a PIC microcontroller and relay driver circuit for precise robotic arm movements.
To perform pick, move, and place operations remotely based on commands received from the MATLAB GUI.
To eliminate wired connections between the operator and the robot, thereby increasing operational flexibility and safety.
To provide a low-cost and efficient automation solution for material handling and industrial applications.
To demonstrate the integration of MATLAB, wireless communication, embedded systems, and robotics in a single automation platform.
The major building blocks of this project are:
Regulated Power Supply.
ZIGBEE Transmitter, Receiver.
PIC Micro Controller
DC Motors with Relays driver.
Robotic ARM.
Gripper.
Crystal oscillator.
LED indicators.
Reset Button
Metal frame.
Software’s used:
PIC-C compiler for Embedded C programming.
PIC kit 2 programmer for dumping code into Micro controller.
 1 × ₹12,500.00
1 × ₹12,500.00

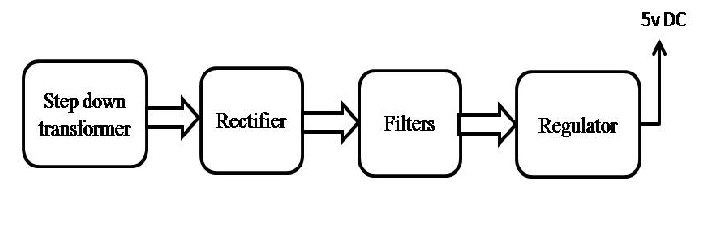 Block diagram:
Block diagram:
 video:
video:









