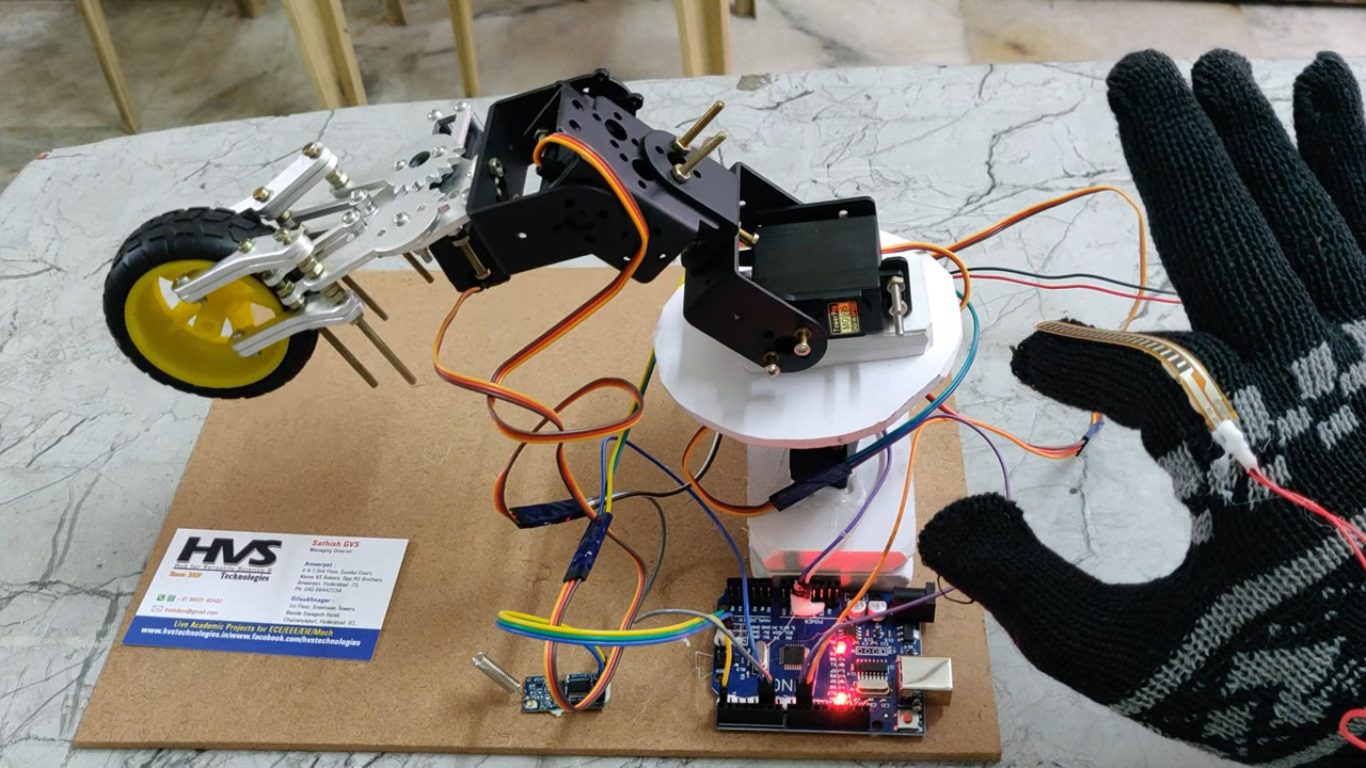
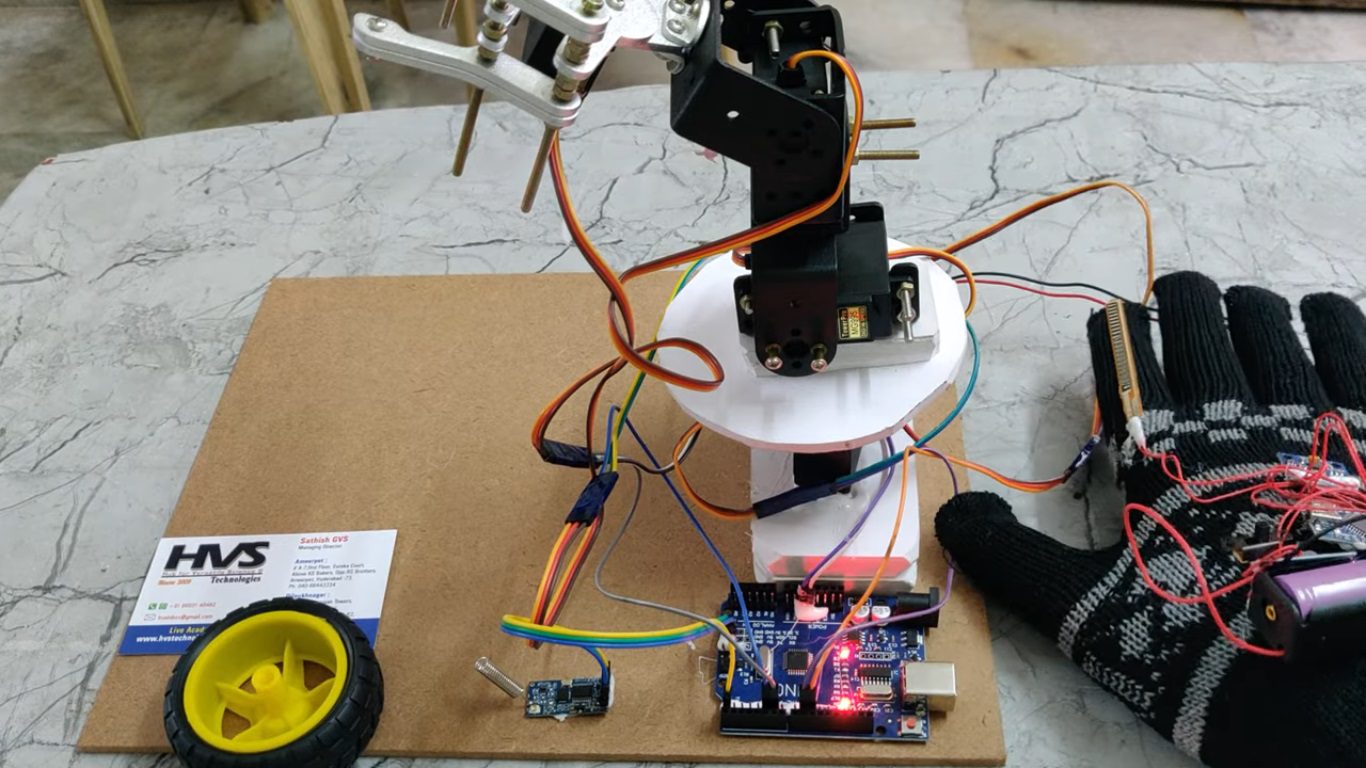
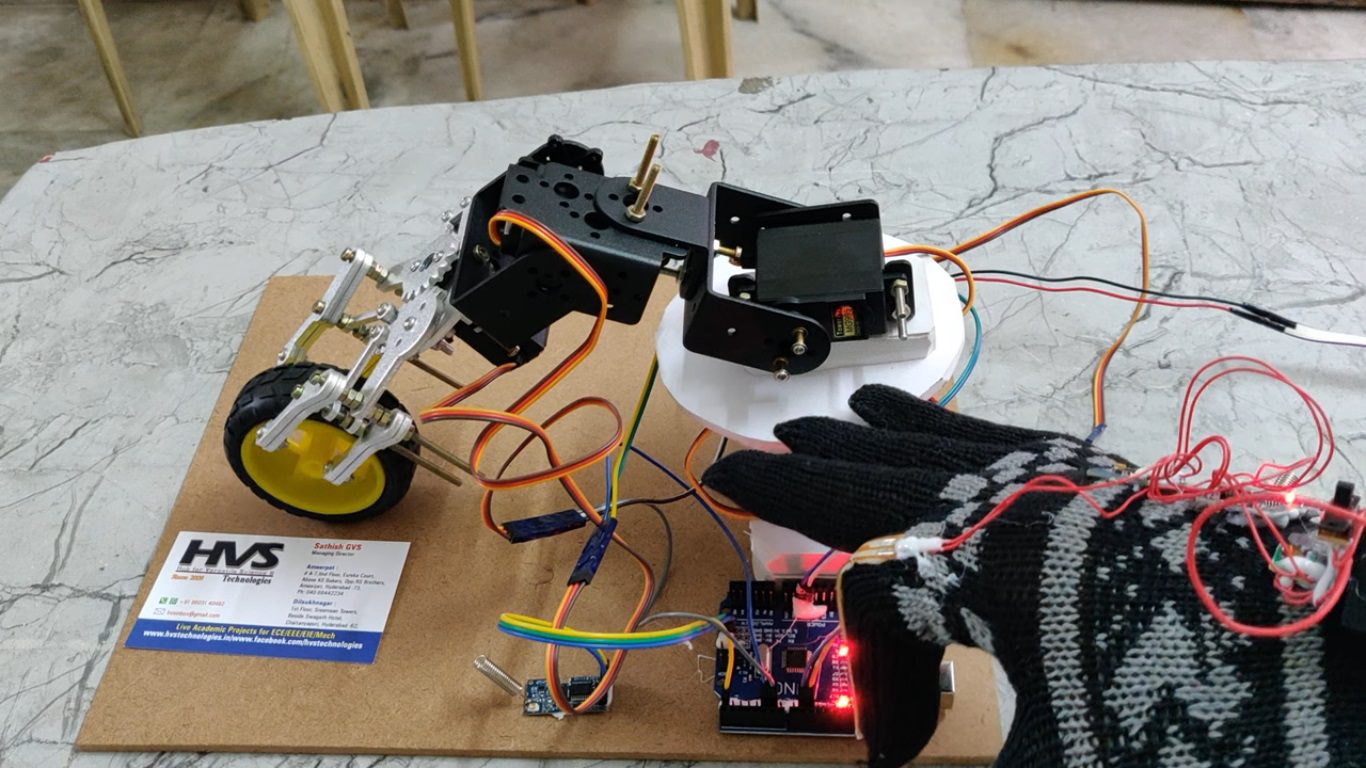
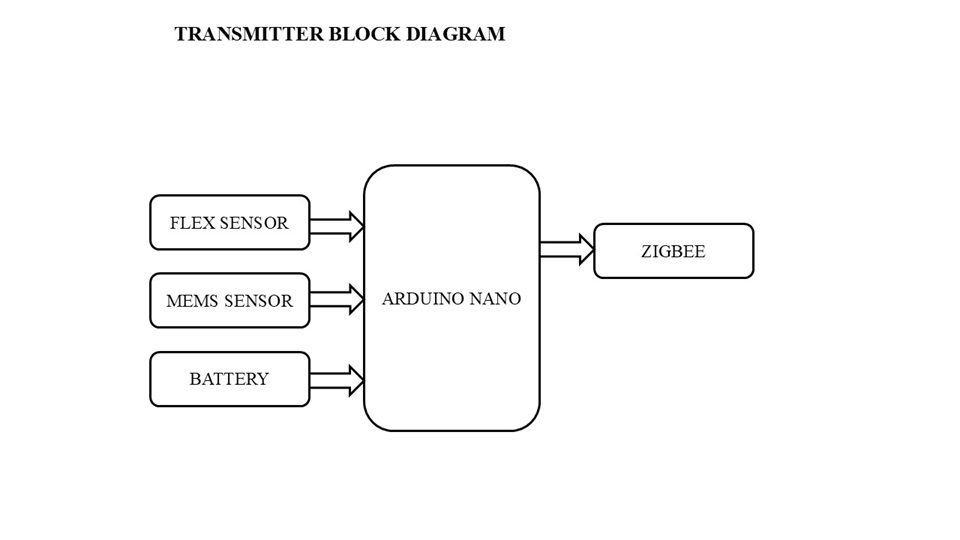
This project aims to design and develop a wireless robotic arm controlled using Flex sensors, MEMS technology, and Zigbee communication. The system is specially designed to assist paralysis patients and physically challenged persons in performing object handling operations easily. Flex sensors are used to detect finger bending movements by varying their resistance according to the bending angle, while the MEMS sensor detects rotational motion along the X, Y, and Z axes for controlling the directional movement of the robotic arm. These sensor values are processed by the Arduino Nano microcontroller and transmitted wirelessly through the Zigbee transmitter module.
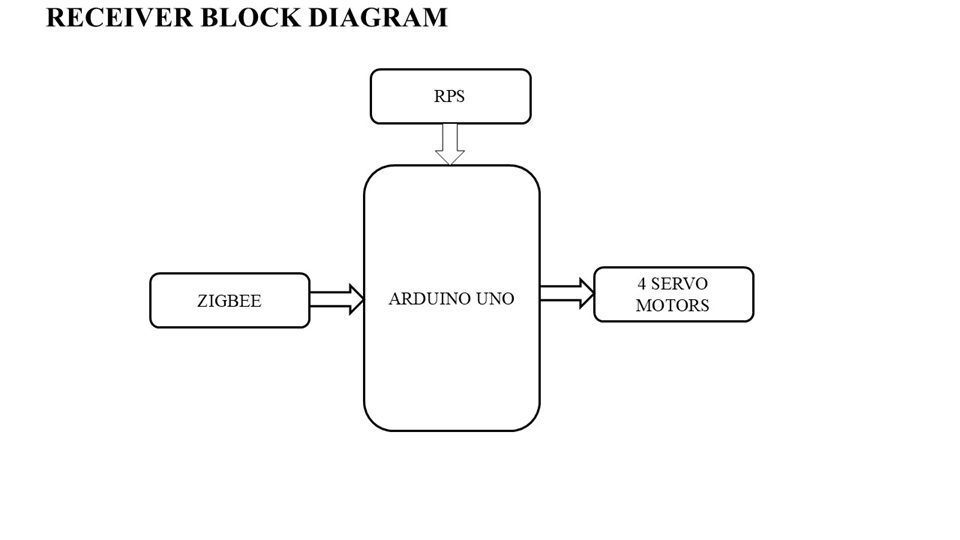
At the receiver side, the Zigbee receiver transfers the received data to the Arduino UNO microcontroller, which controls the servo motors connected to the robotic arm and gripper mechanism. Based on the hand gestures and finger movements, the robotic arm performs up-down, left-right, open-close, and pick-and-place operations accurately. The proposed system provides efficient wireless control, reduced human effort, and improved flexibility in robotic applications. This technology can be widely used in medical assistance systems, industrial automation, and remote object handling applications.
OBJECTIVES:
To design a wireless robotic arm system using Flex sensors, MEMS sensors, and Zigbee communication technology.
To control robotic arm movements through hand gestures and finger bending motions for pick-and-place operations.
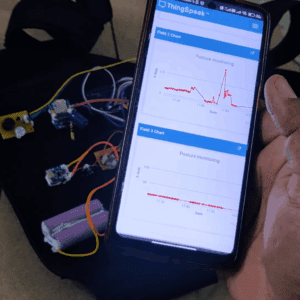
To transmit sensor data wirelessly using Zigbee modules between the transmitter and receiver sections.
To interface Arduino Nano and Arduino UNO microcontrollers for processing sensor inputs and controlling servo motors effectively.
To assist physically challenged and paralysis patients by developing an easy-to-use robotic arm for object handling applications.
The major building blocks of this project are:
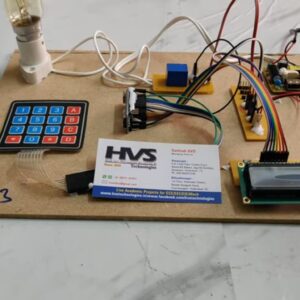
Regulated power supply.
Battery Supply (3.7V).
Arduino uno Microcontroller.
Arduino nano.
Flex sensor.
MEMS sensor.
Zigbee transmitter and receiver modules.
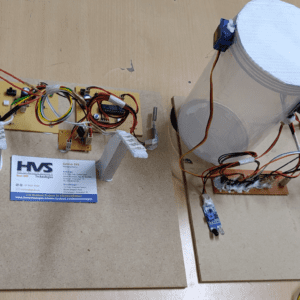
4-Servo motors.
Robotic arm.
Hand glove.
LED indicators.
Software’s used:
Arduino IDE for compiling and dumping code into Microcontroller.
 1 × ₹9,500.00
1 × ₹9,500.00



 video:
video: