Subtotal ₹6,500.00


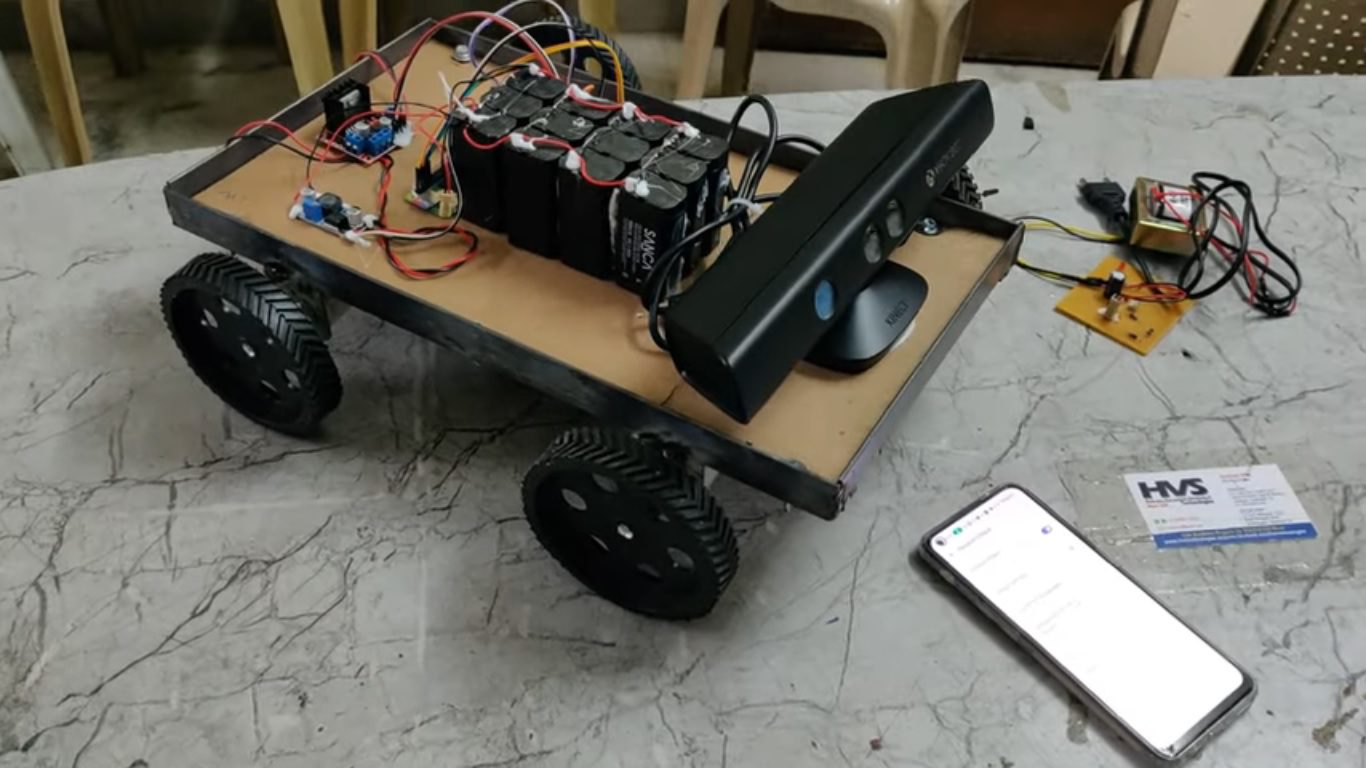
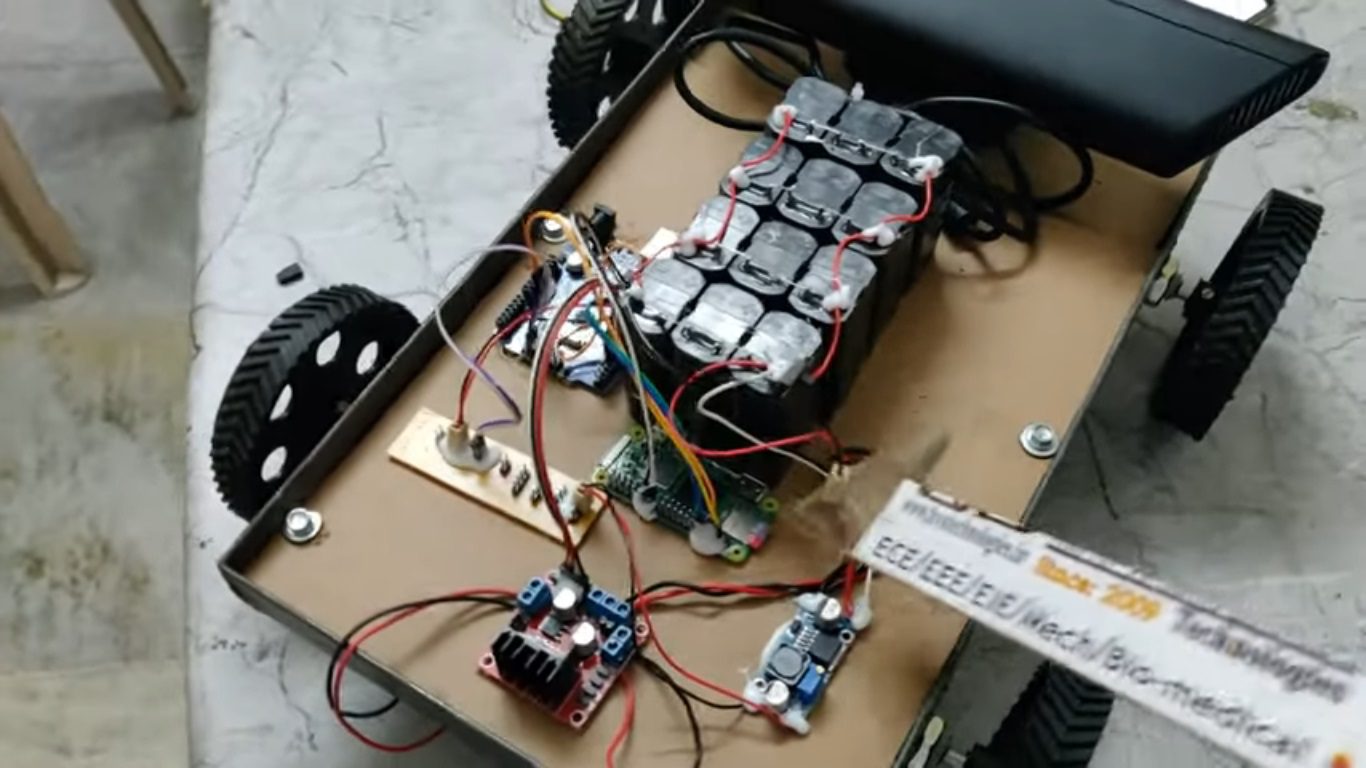

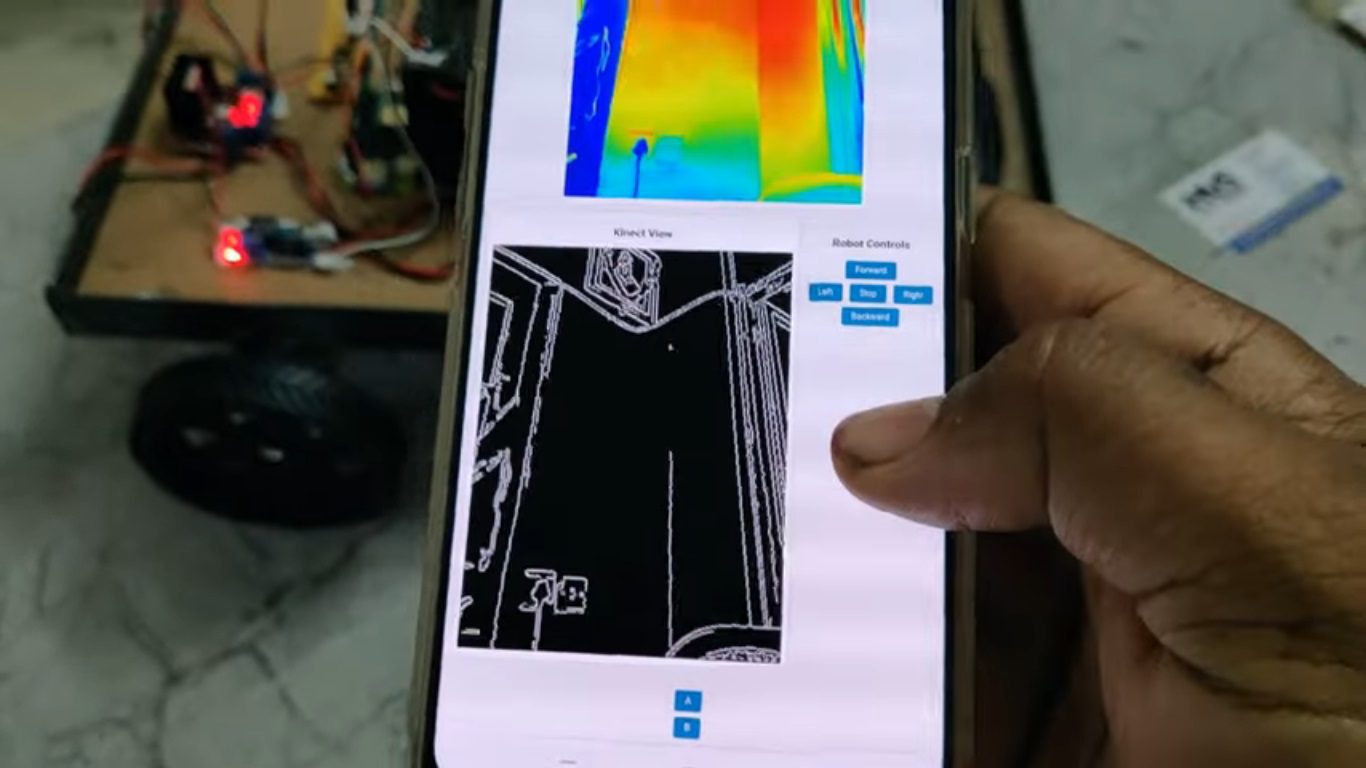

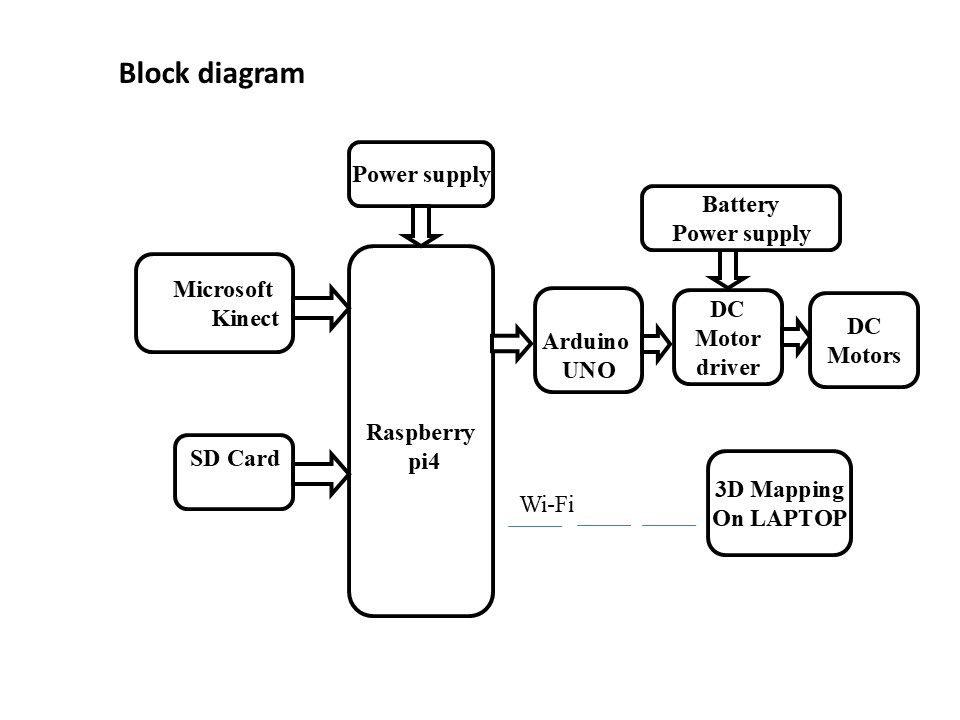
The ROS Based Robot for 3D Scanning Using Kinect 360 is an advanced robotic system developed for real-time environment mapping and 3D visualization. The system integrates a Microsoft Kinect 360 sensor with a Raspberry Pi 4 running the Robot Operating System (ROS) to capture depth and RGB image data from the surrounding environment. The acquired data is processed to generate accurate three-dimensional maps, which are transmitted wirelessly through Wi-Fi to a laptop for real-time monitoring and visualization. An Arduino UNO interfaced with a DC motor driver controls the movement of the robot, enabling smooth navigation and scanning operations.
The project is designed to support autonomous navigation, obstacle detection, and environment analysis by utilizing ROS-based mapping and sensor integration techniques. The generated 3D maps can be applied in indoor navigation, robotic exploration, surveillance, virtual modeling, and research applications. By combining affordable hardware with open-source ROS technology, the system provides a cost-effective and efficient solution for robotics education, research, and real-time 3D scanning applications. The project demonstrates the practical implementation of intelligent robotic mapping systems capable of operating in dynamic environments.
Objectives
 video:
video:
- To develop a ROS-based mobile robot capable of performing real-time 3D scanning and mapping using the Kinect 360 sensor.
- To capture and process depth and RGB image data using Raspberry Pi 4 for accurate environment visualization.
- To enable wireless transmission of 3D mapping data to a laptop through Wi-Fi for real-time monitoring.
- To implement obstacle detection and avoidance techniques for autonomous robot navigation.
- To control robot movement using Arduino UNO and DC motor driver interfacing.
- To create an affordable and efficient robotic platform for educational, research, and indoor mapping applications.
- To integrate ROS tools and packages for sensor communication, data processing, and robotic mapping.
- To improve real-time spatial analysis and environment exploration using intelligent robotic systems.
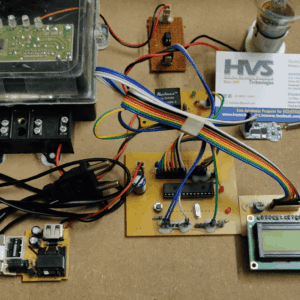
- Battery power supply.
- Raspberry pi4.
- Microsoft Kinect.
- Arduino UNO.
- DC motor driver.
- DC motor.
- Robot chassis.
- Python language.
- Raspbian OS.
- Express SCH for Circuit design.
 video:
video:







