No products in the cart.


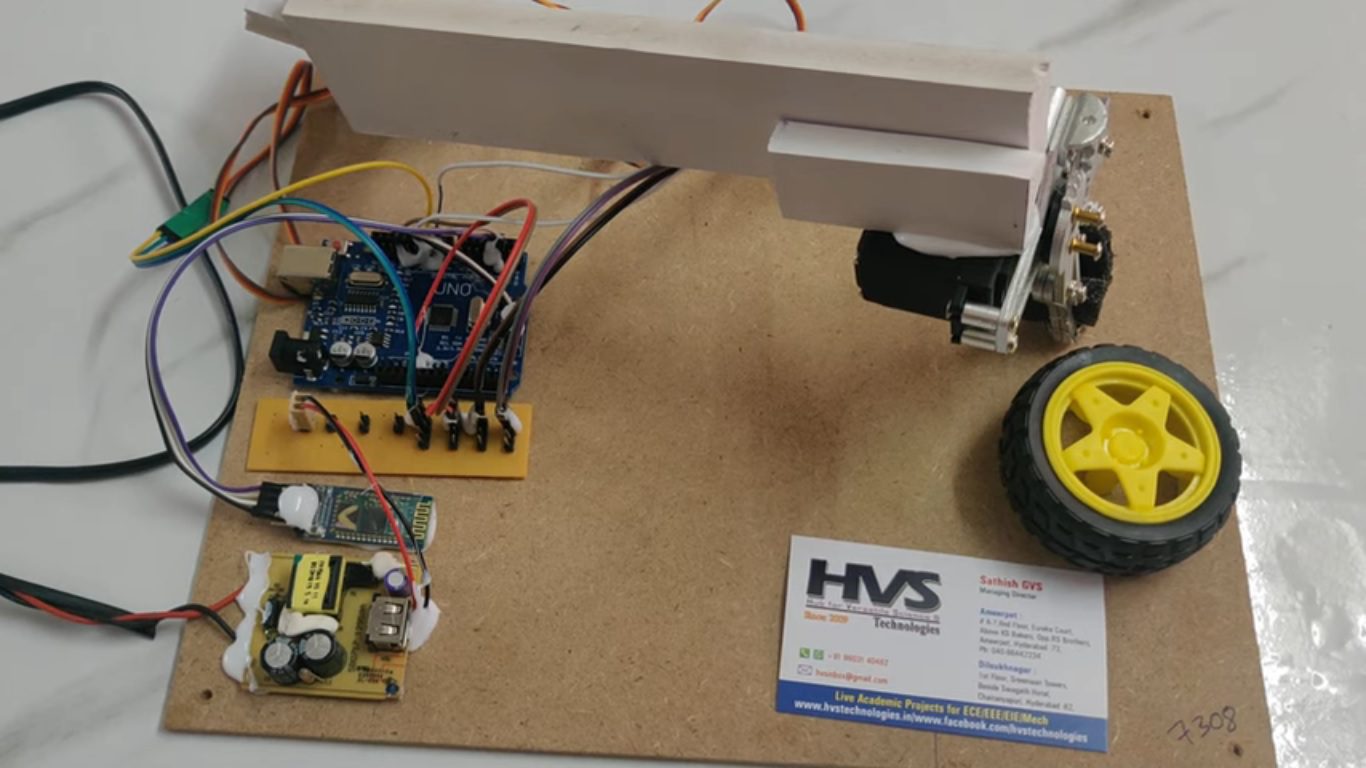

This project focuses on the design and fabrication of a robotic gripper for handling fragile objects with precision. The system integrates a Bluetooth-controlled pick-and-place robotic arm featuring a servo-driven WPVC (Wood Plastic Composite) arm for lightweight and durable operation. The gripper mechanism is designed to exert controlled force, ensuring safe handling of delicate items such as glassware, electronics, and laboratory equipment. A microcontroller-based system processes user commands transmitted via a Bluetooth module, enabling real-time remote control. The servo motors facilitate precise movement of the arm and gripper, allowing efficient object manipulation. The WPVC structure enhances the arm’s strength while maintaining a lightweight design for improved maneuverability. This robotic system has potential applications in industrial automation, biomedical handling, and warehouse management, reducing human intervention and minimizing damage to fragile goods.
The main objectives of the project are:
 video:
video:
Design and Fabrication: Develop a robotic gripper with a WPVC-based robotic arm for lightweight and durable operation.
Safe Handling of Fragile Objects: Ensure precise control of gripping force using servo motors to prevent damage to delicate items like glassware, electronics, and laboratory samples.
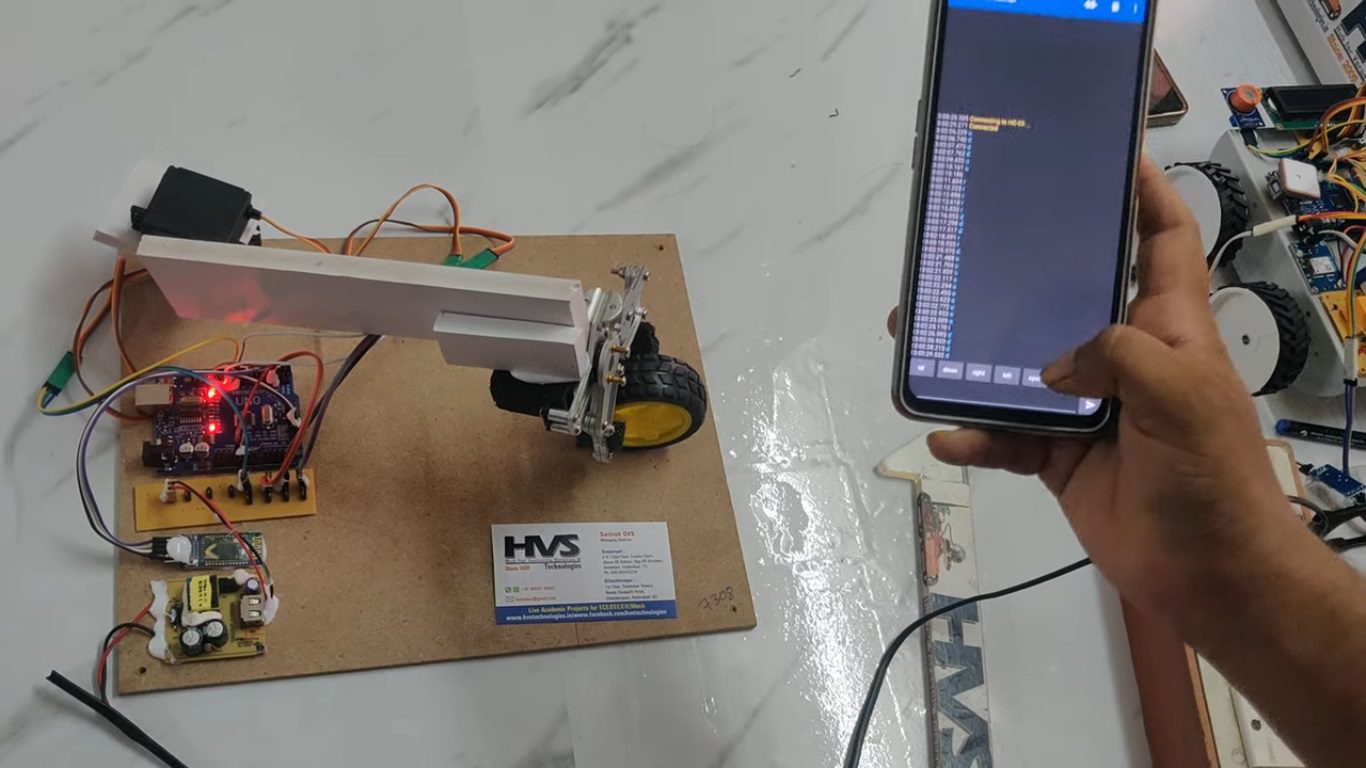
Bluetooth-Based Control: Implement a Bluetooth module for remote control, allowing users to operate the robotic arm via a Smartphone or other wireless devices.
Pick and Place Mechanism: Enable accurate and efficient object manipulation using servo-driven movements for industrial and domestic applications.
Automation and Precision: Enhance repeatability and accuracy in handling fragile objects through microcontroller-based control logic.
Structural Optimization: Utilize WPVC material for the robotic arm to achieve an optimal balance between strength, flexibility, and weight reduction.
Versatile Applications: Develop a system applicable in manufacturing, packaging, medical handling, and laboratory automation, reducing human intervention and minimizing risks.
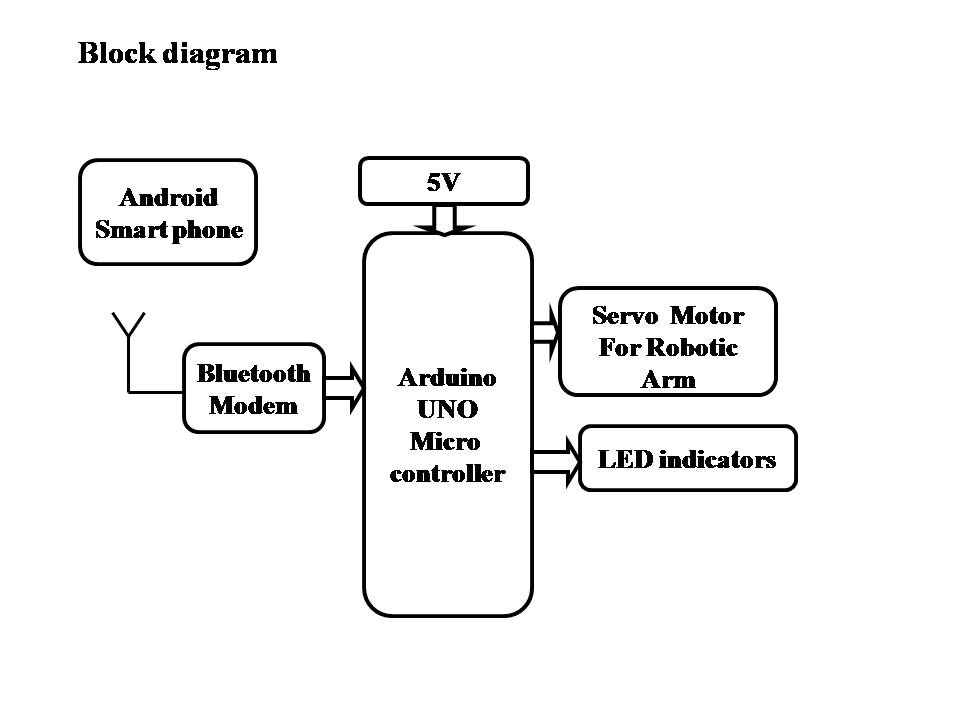
The main building blocks of the project are:- Power Supply.
- Arduino UNO Microcontroller.
- Android Smart phone.
- Servo motor along with Robotic arm.
- HC-05 Bluetooth modem.
- Arduino IDE Studio compiler for Embedded C programming.
- Express SCH for Circuit design.
 video:
video:







