No products in the cart.


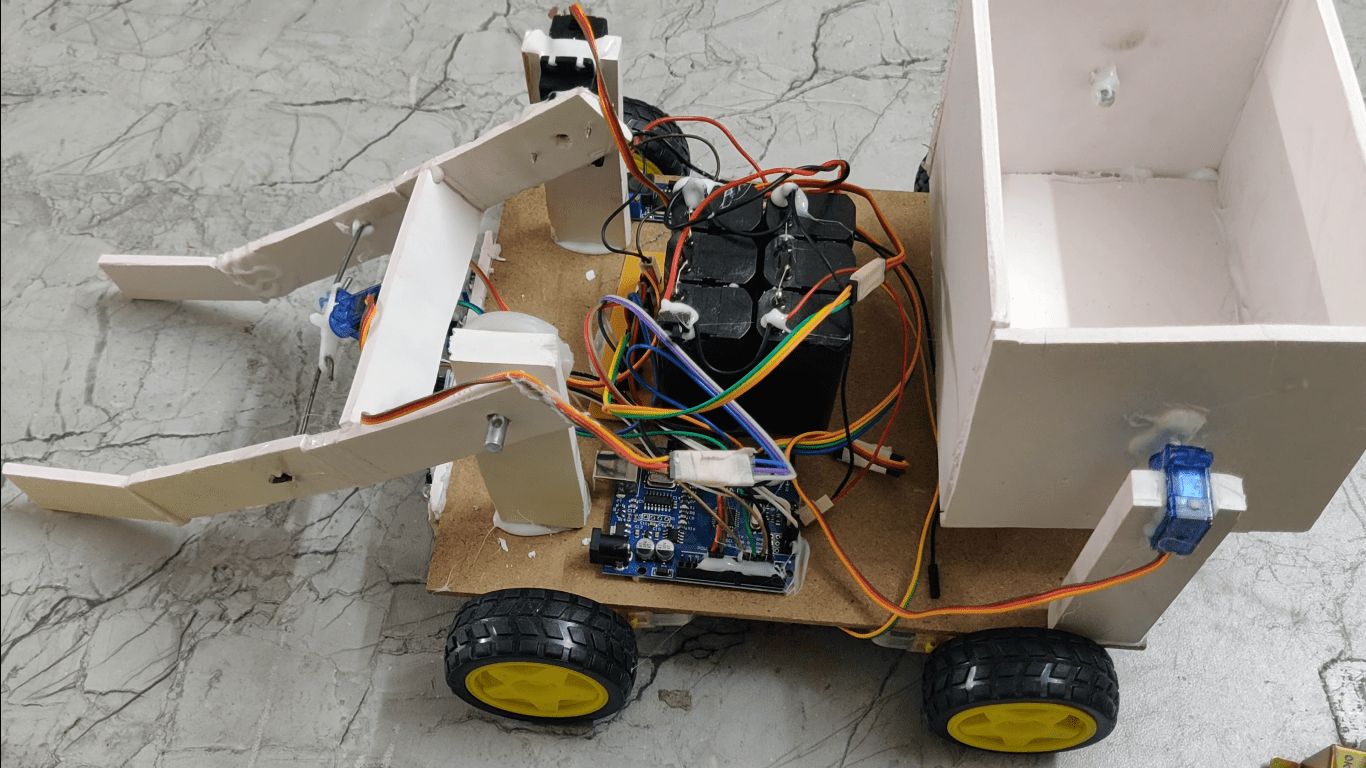
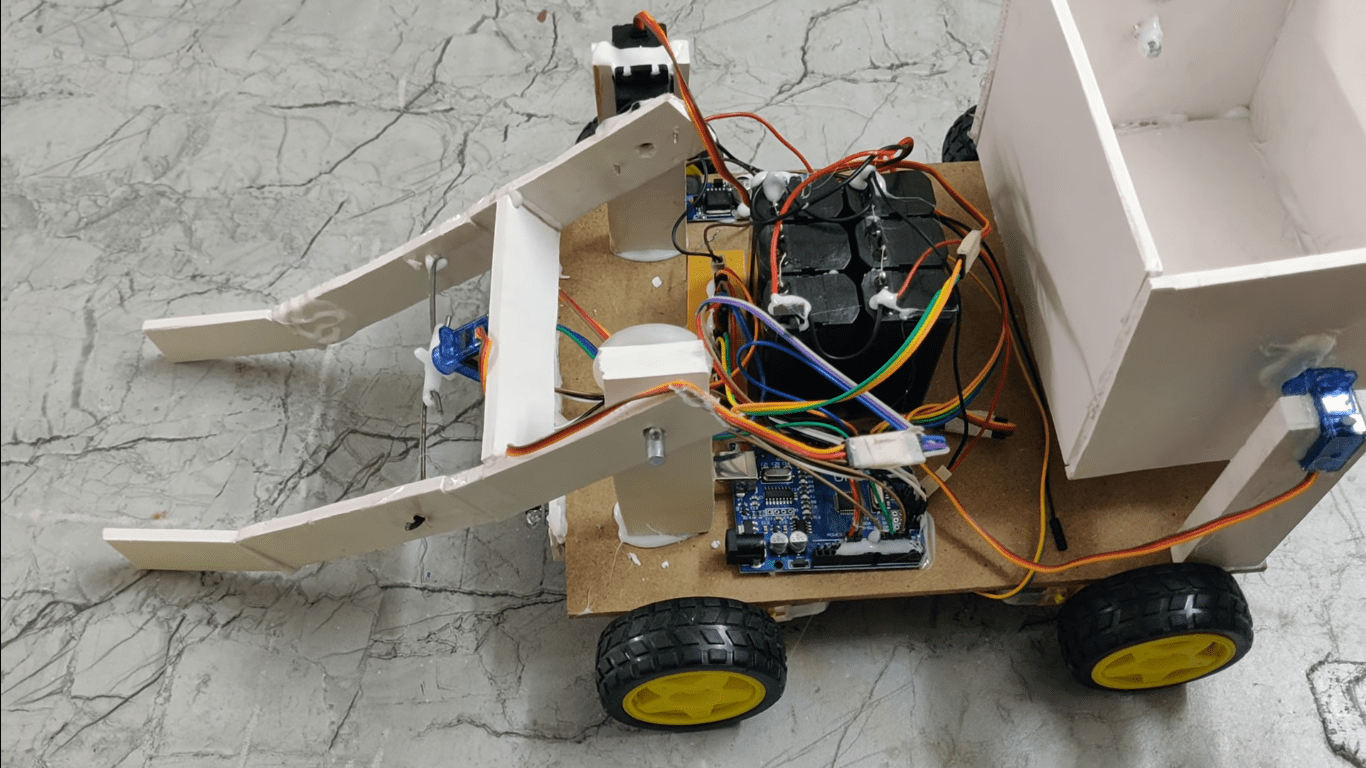
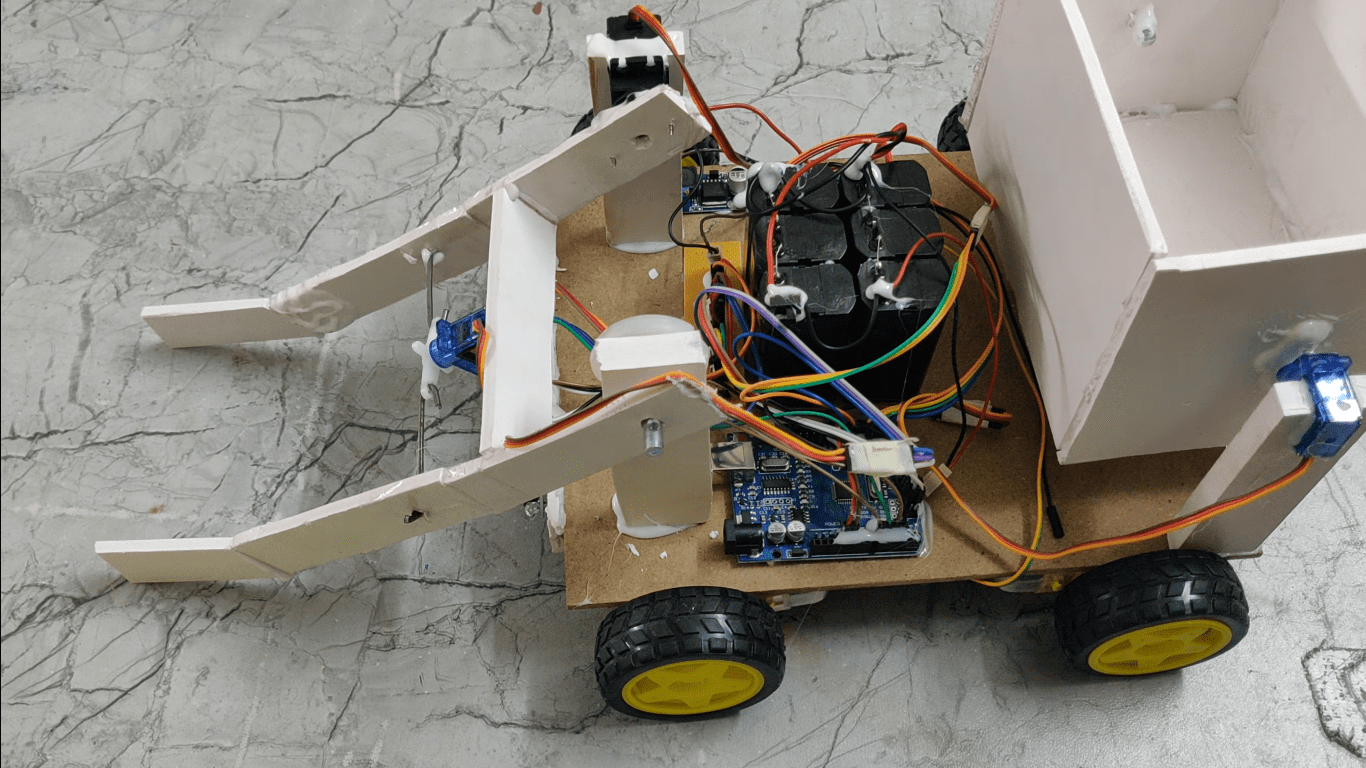
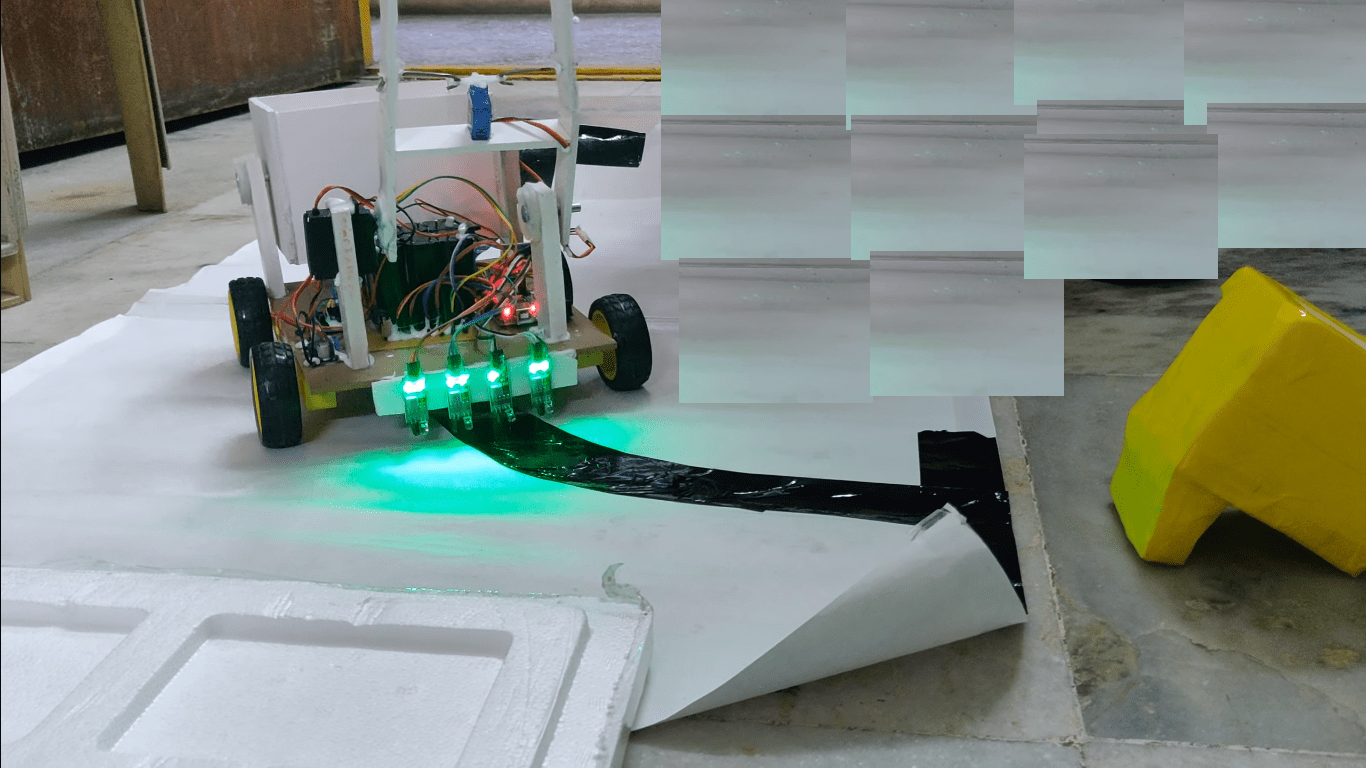

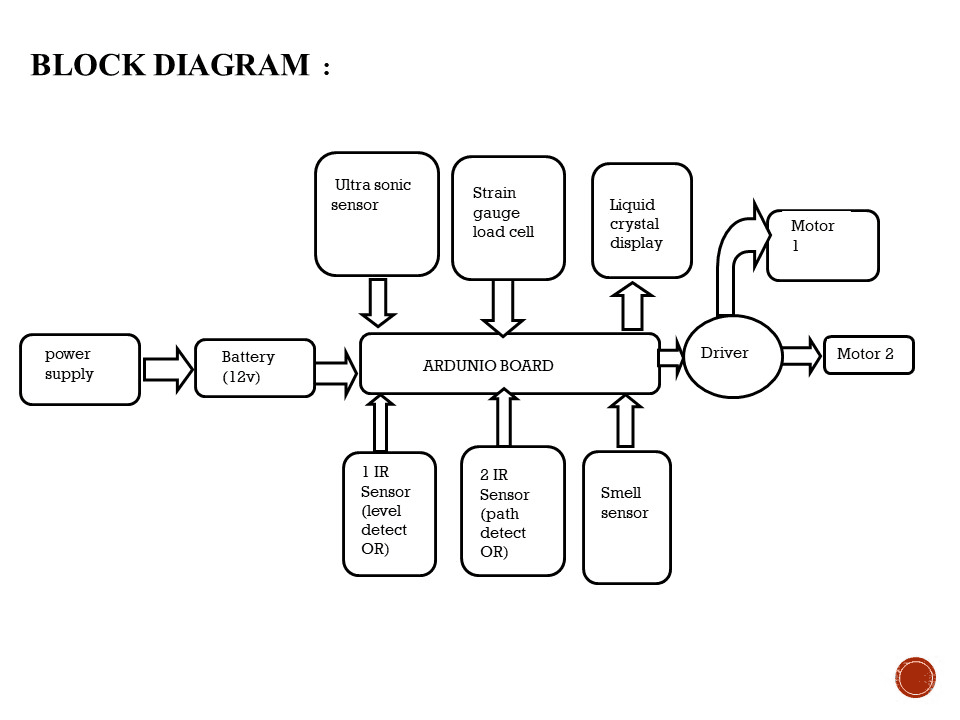
This project proposes the design and development of an intelligent garbage recyclable line follower robot equipped with advanced sensor technologies. The system utilizes a combination of 2 IR sensors, an ultrasonic sensor, a strain gauge load cell, a liquid crystal oscillator, a smell sensor, and an Arduino board for real-time data processing and decision-making. The robot is powered by a battery power supply and employs a driver circuit to control its motors for precise movement. The integration of these sensors enables the robot to detect and differentiate between various types of waste materials, navigate along predefined paths, and effectively segregate recyclable and non- recyclable items. These IR sensors are utilized for line following, enabling the robot to navigate along predefined paths accurately. Ultrasonic senor is used for obstacle detection and these strain gauge load cell enables the robot to measure the weight of garbage bins, we know that smell sensor detects the odors emitted by organic waste, The implementation of an Arduino-based control system facilitates adaptive behavior, allowing the robot to respond dynamically to environmental changes and optimize its recycling operations. Overall, the intelligent garbage recyclable line follower robot represents a significant advancement in waste management technology, offering automated, intelligent, and sustainable solutions for waste collection, segregation, and recycling.
The main blocks of this project are:
 video:
[/iframe
video:
[/iframe
- Regulated power supply.
- 2 IR Sensors.
- BATTERY.
- Arduino board.
- Ultrasonic sensor.
- Strain gauge load cell.
- Liquid crystal display.
- Smell sensor.
- Driver.
- Motors.
- ARDUINO IDE.
- Embedded c language.
 video:
[/iframe
video:
[/iframe 






