No products in the cart.



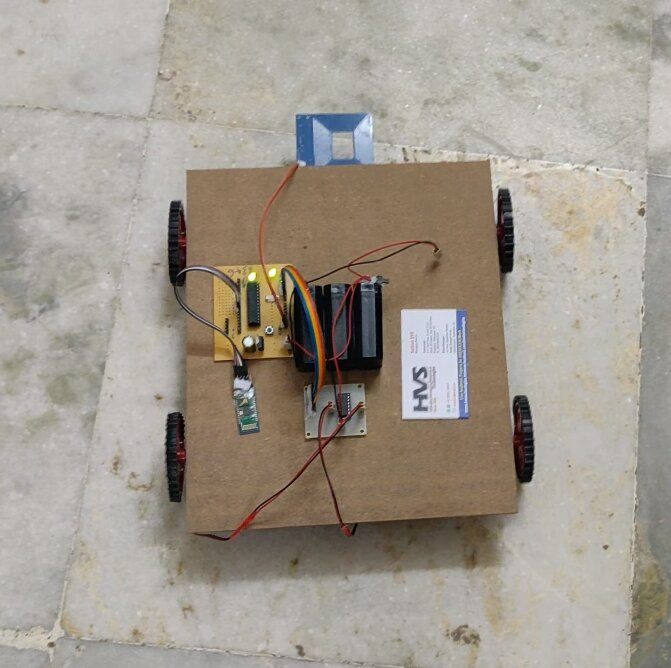
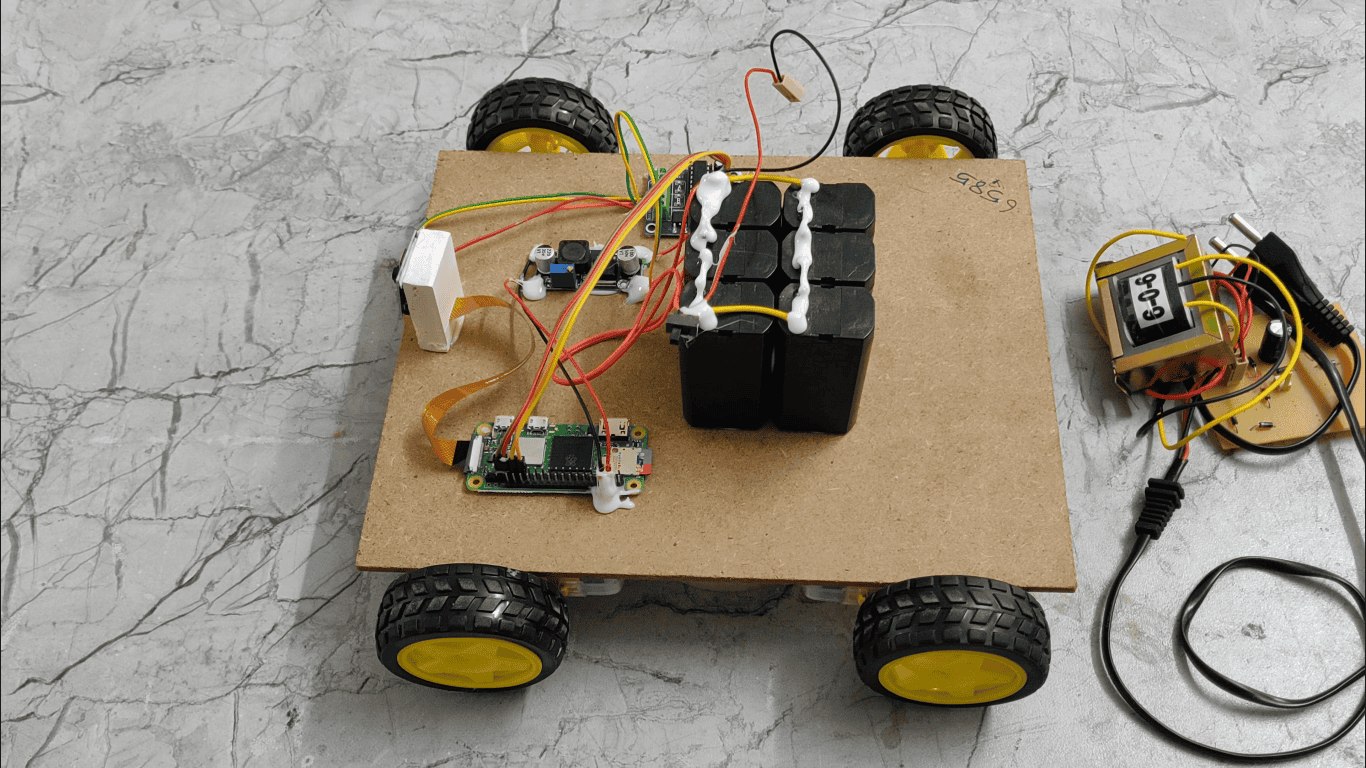
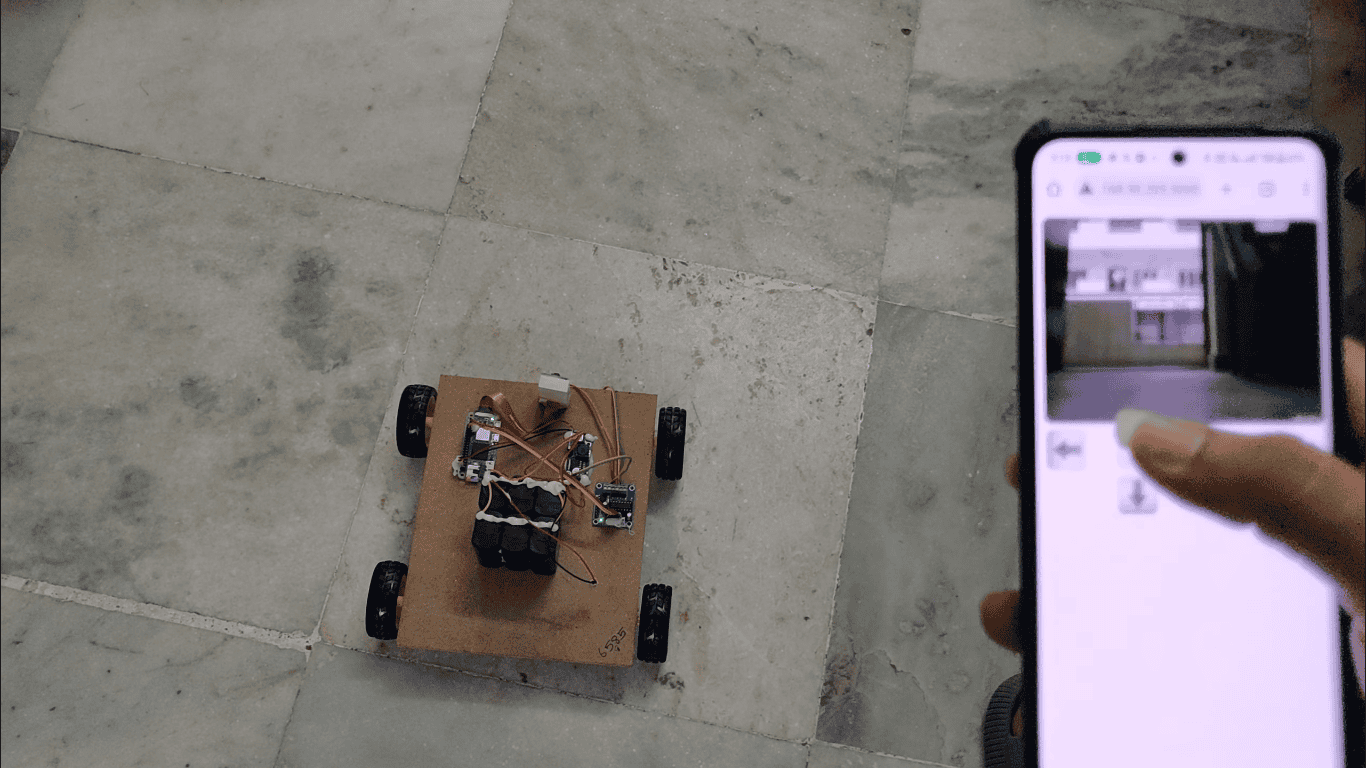
The project aims in designing a Bluetooth Controlled rocker bogie robot. The robot can be executed using DC motor mounted on it and can be controlled by a unique wireless communication protocol.
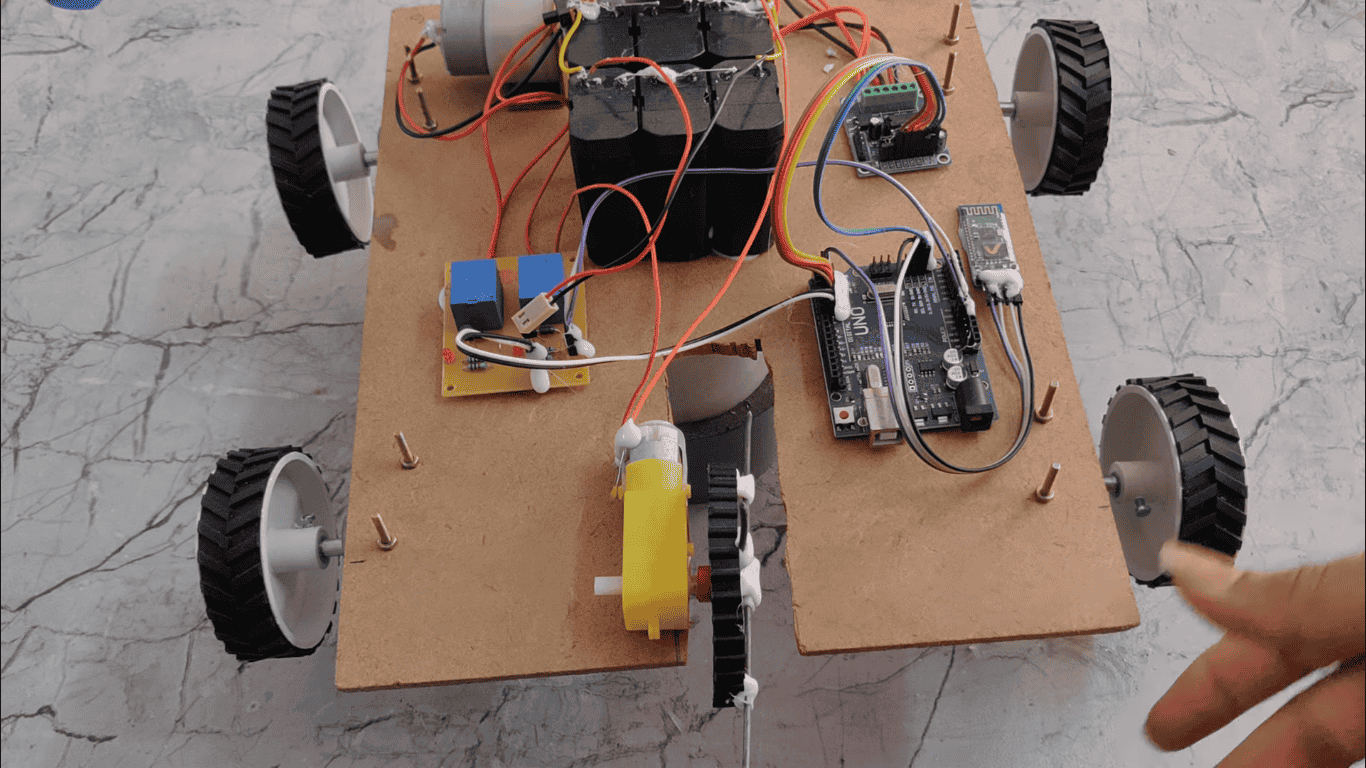
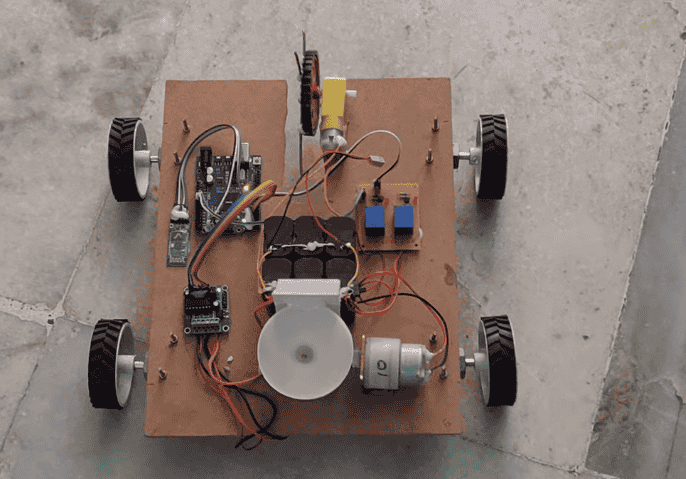
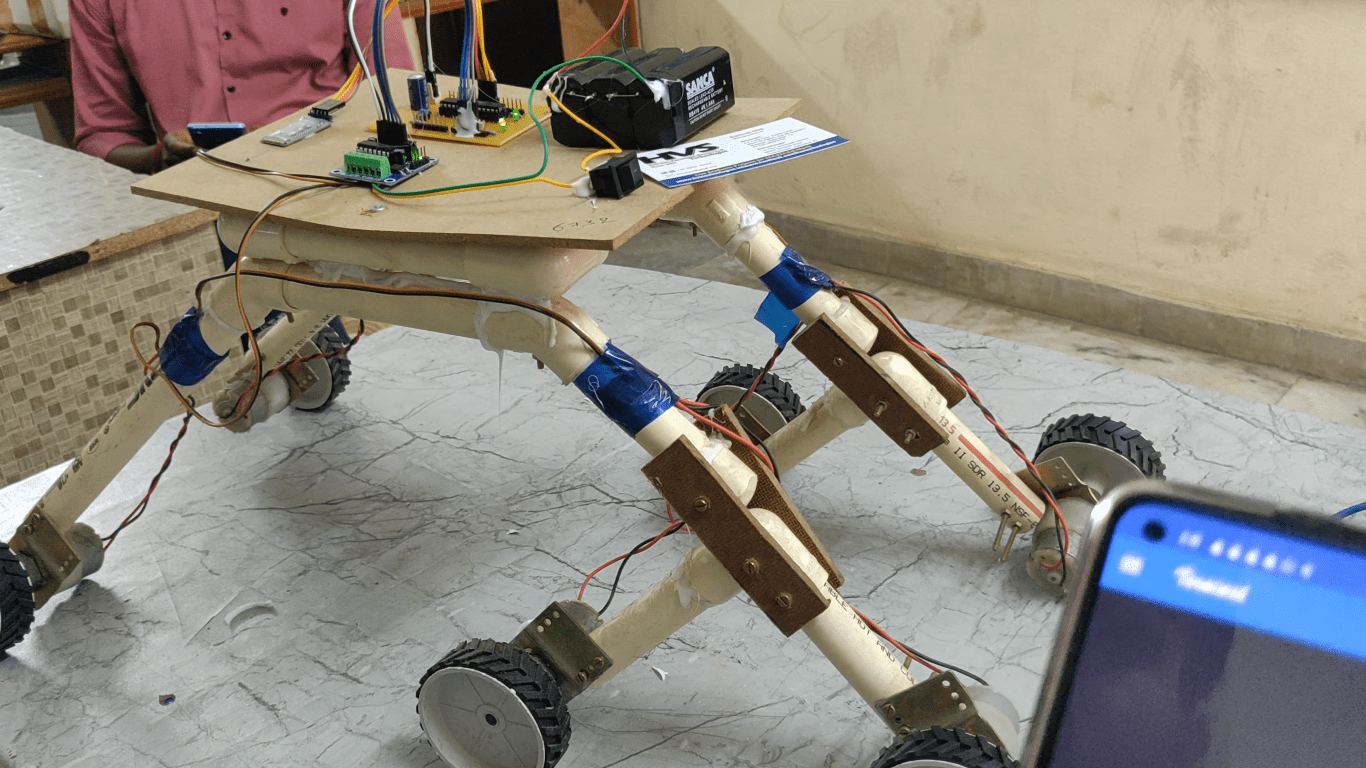
The Rocker-Bogie design has no springs and stub axles for each wheel, allowing the rover to climb over obstacles, such as rocks, that are up to twice the wheel’s diameter in size while keeping all six wheels on the ground. As with any suspension system, the tilt stability is limited by the height of the center of gravity. Systems using springs tend to tip more easily as the loaded side yields. The system is designed to be used at slow speeds of around 10 cm/s, so as to minimize dynamic shocks and consequential damage to the vehicle when surmounting sizable obstacles.
The Rocker-Bogie system has been the suspension arrangement used in the Mars rovers. It is currently NASA’s favored design.
The term “rocker” comes from the rocking aspect of the larger links on each side of the suspension system. These rockers are connected to each other and the vehicle chassis through a differential. Relative to the chassis, when one rocker goes up, the other goes down. The chassis maintains the average pitch angle of both rockers. One end of a rocker is fitted with a drive wheel and the other end is pivoted to a bogie. The term “bogie” refers to the links that have a drive wheel at each end.
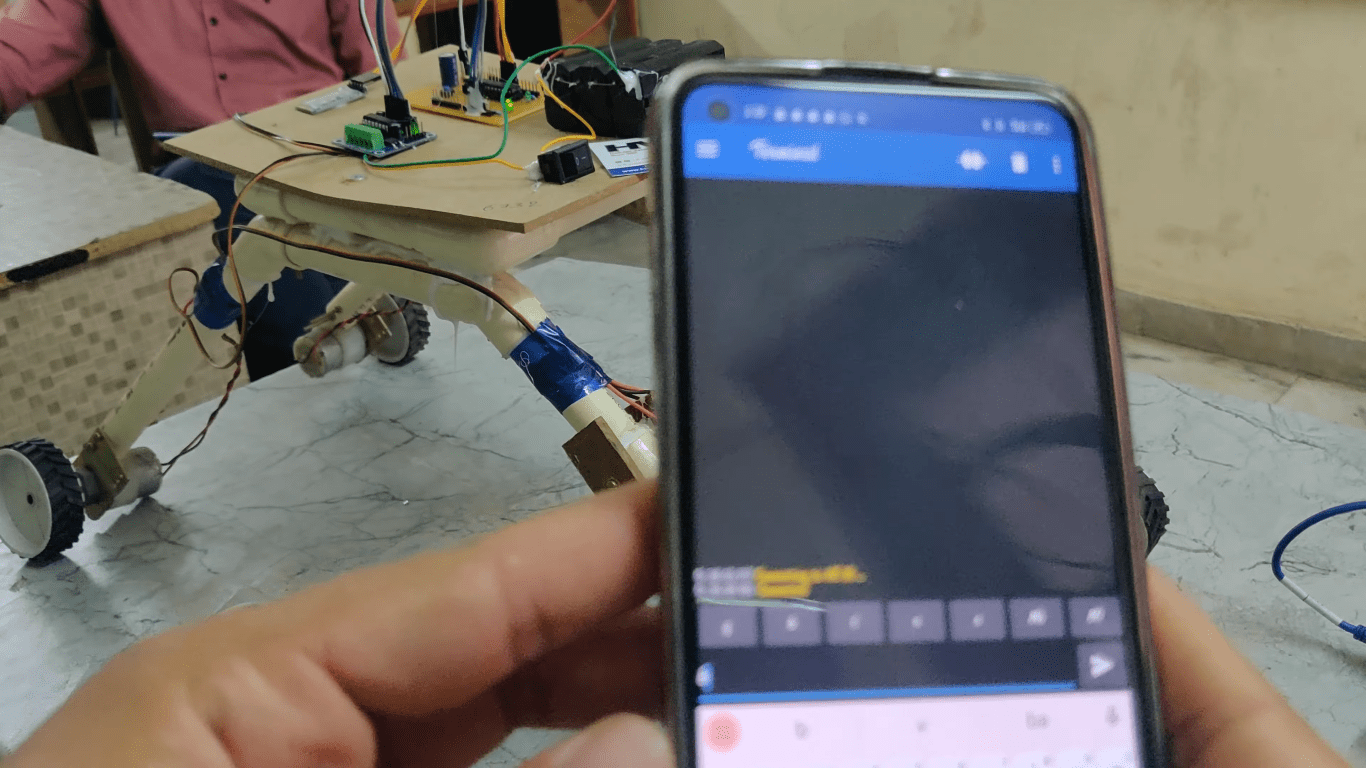
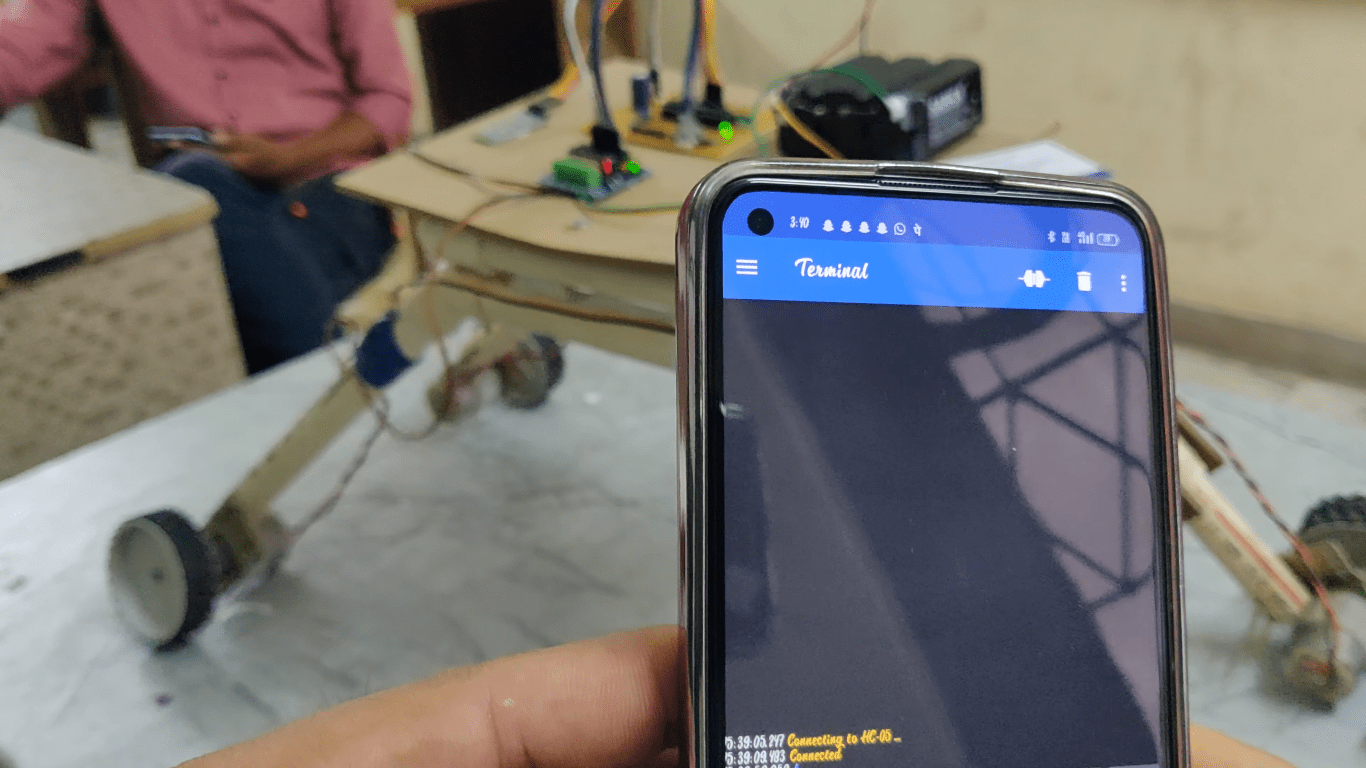
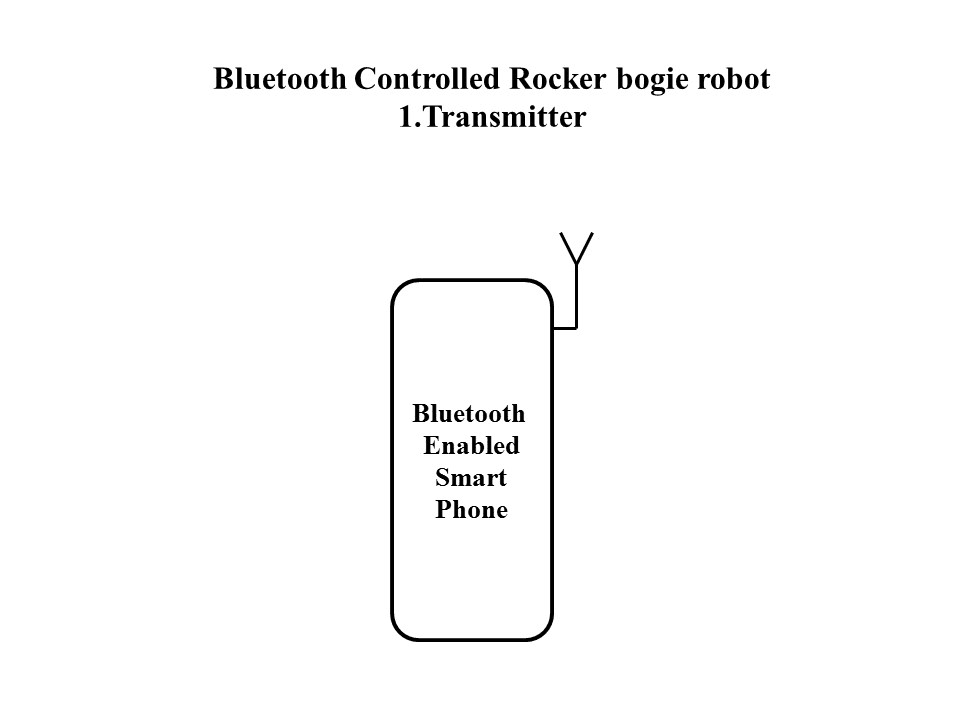
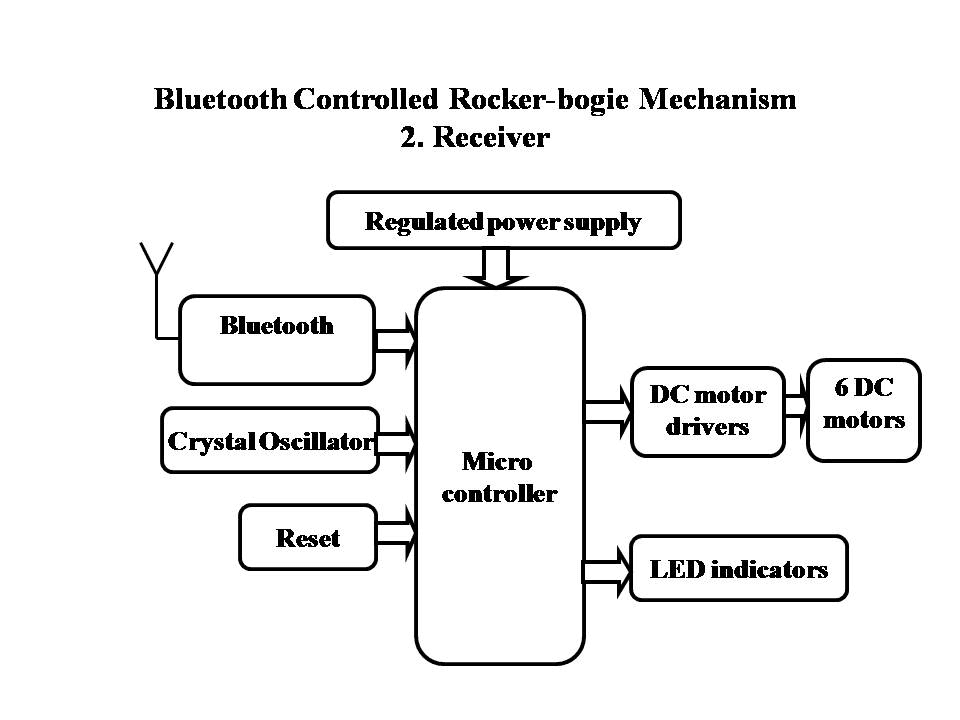
The controlling device of the whole system is a Microcontroller. The Microcontroller gets the input from Bluetooth enabled smart phone. This data is processed and acts accordingly on Robot DC motor.
This project finds its major applications while we are monitoring larger areas like political canvassing, cricket stadiums, international conferences, worship places, banking etc. This project assures us with more reliable and confident security system.
The objectives of the project include:
 Block diagram:
video:
Block diagram:
video:
- Monitors large spaces in industrial environment.
- Wireless controlling of robot.
- Bluetooth technology.
- Interfacing Bluetooth to Microcontroller
- DC motor working and need for motor driver.
- Embedded C programming.
- PCB designing.
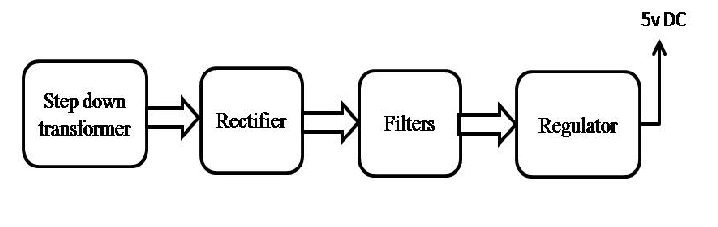
- Battery Power Supply.
- HC-05 Bluetooth.
- PIC Micro Controller.
- DC Motor with driver.
- Crystal oscillator.
- Reset Button.
- LED indicators.
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
 Block diagram:
Block diagram:
 video:
video: