Subtotal ₹14,250.00




This web page showcases a cutting-edge interface for a cricket fielding robot designed for live streaming, robotic control, and advanced camera functionality. The robot features a Pi camera that provides real-time video feeds, enabling users to monitor training sessions or matches from any location. The interface includes a mode selection switch, allowing users to easily toggle between manual control, human following, and ball following modes, all powered by machine learning algorithms running on a Raspberry Pi. The robot is battery-operated, ensuring mobility on the field, while servo motors control the camera's orientation for precise tracking of players and the ball. This system enhances fielding efficiency and training effectiveness by autonomously following designated targets. By integrating robotics, machine learning, and user-friendly controls, the web page demonstrates the potential for innovative applications in cricket training, ultimately improving player performance and engagement.
The main objective of this project is:
 video:
video:
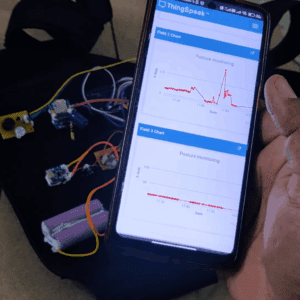
- Live Streaming Capability: To provide real-time video feeds from the Pi camera, enabling users to monitor cricket training sessions and matches remotely.
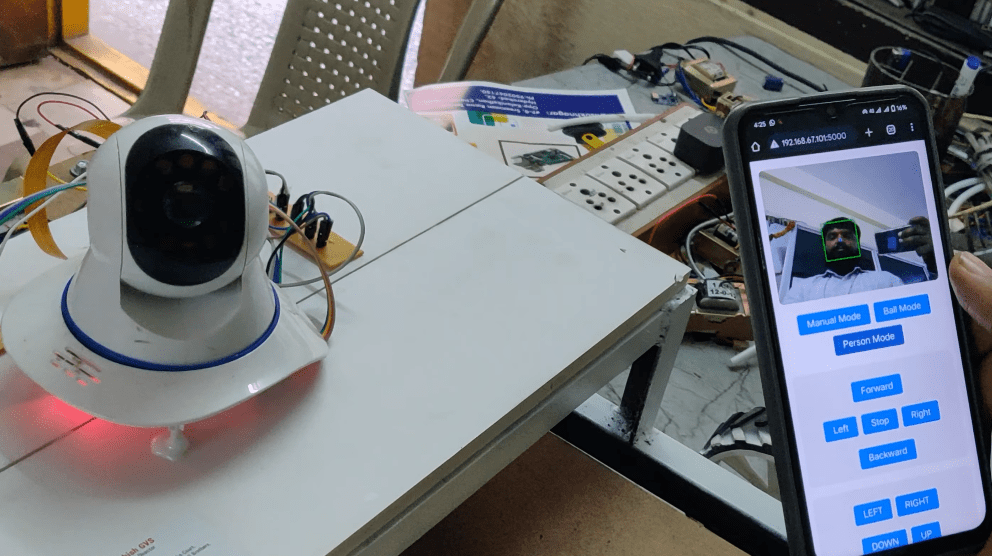
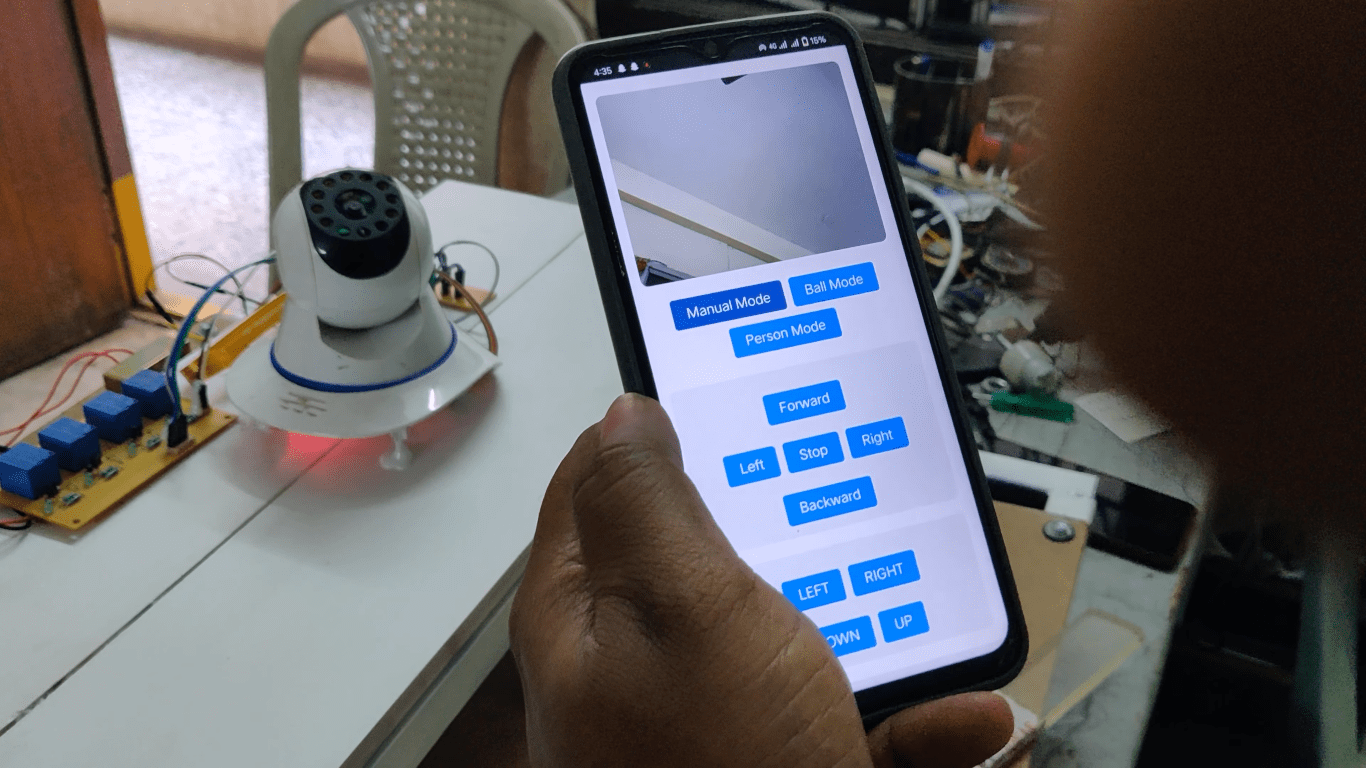
- User-Friendly Control Interface: To design an intuitive interface that allows users to easily navigate and control the robot, facilitating seamless interaction with the system.
- Mode Selection Flexibility: To implement a mode selection switch that enables users to toggle between manual control, human following, and ball following modes, enhancing usability for various training scenarios.
- Autonomous Tracking: To utilize machine learning algorithms on the Raspberry Pi to enable the robot to autonomously follow designated targets, such as players and balls, improving fielding efficiency.
- Mobility and Power Management: To ensure the robot is battery-operated for enhanced mobility on the field, allowing it to move freely and adapt to dynamic training environments.
- Precision Camera Control: To incorporate servo motors for precise control of the camera’s orientation, enabling accurate tracking of fast-moving objects like players and balls.
- Enhanced Training Effectiveness: To improve training effectiveness by providing a tool that aids players in developing their fielding skills through real-time feedback and engagement.
- Innovation in Cricket Training: To demonstrate the potential for robotics and machine learning applications in sports, promoting innovative solutions that can enhance player performance and engagement in cricket training.
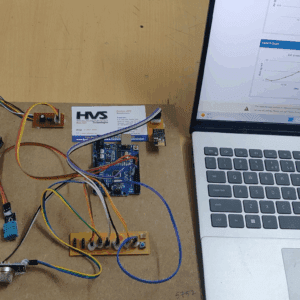
- Battery power supply.
- Raspberry Pi zero 2 w.
- Pi camera.
- L298N motor driver.
- 4DC Motors.
- 4 wheels.
- SD card.
- Servo motors.
- Python language.
- Raspbian OS.
- Machine learning algorithm.
- Express SCH for Circuit design.







