No products in the cart.


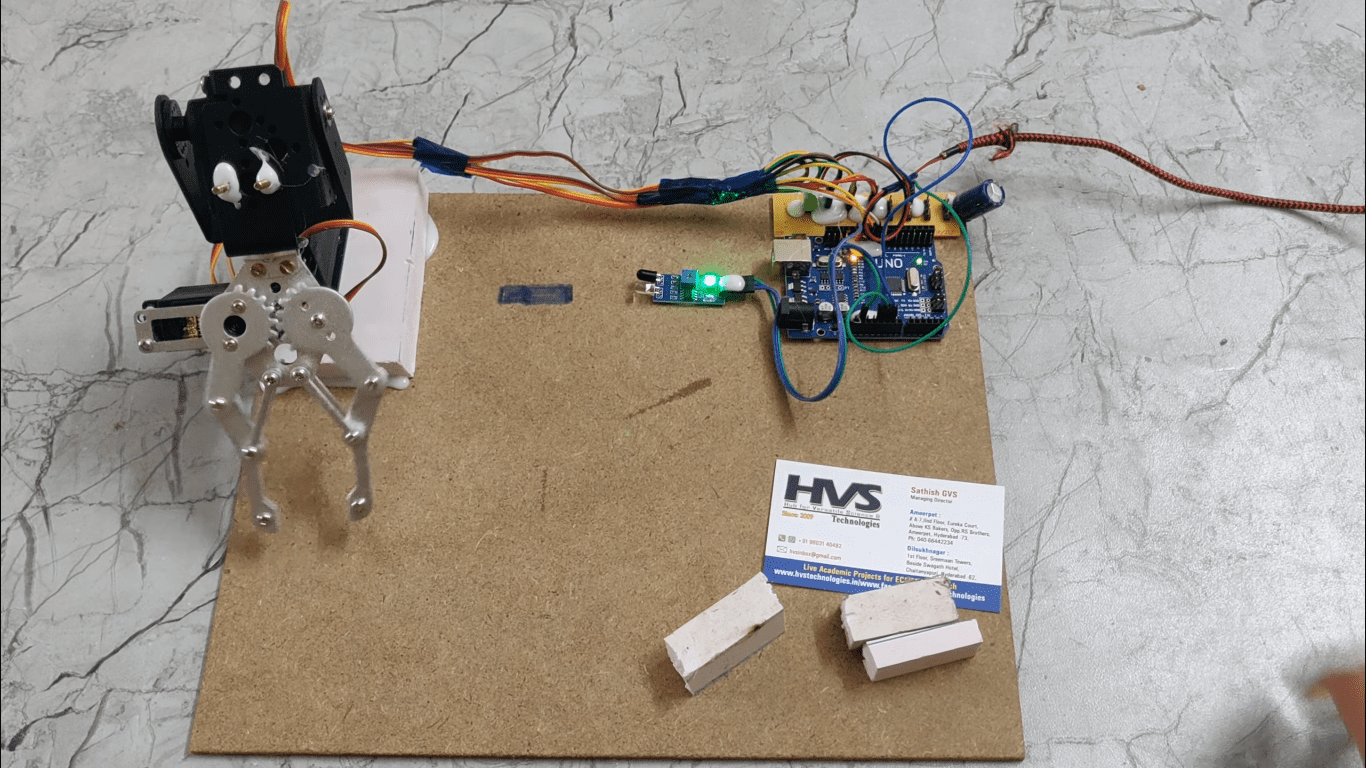
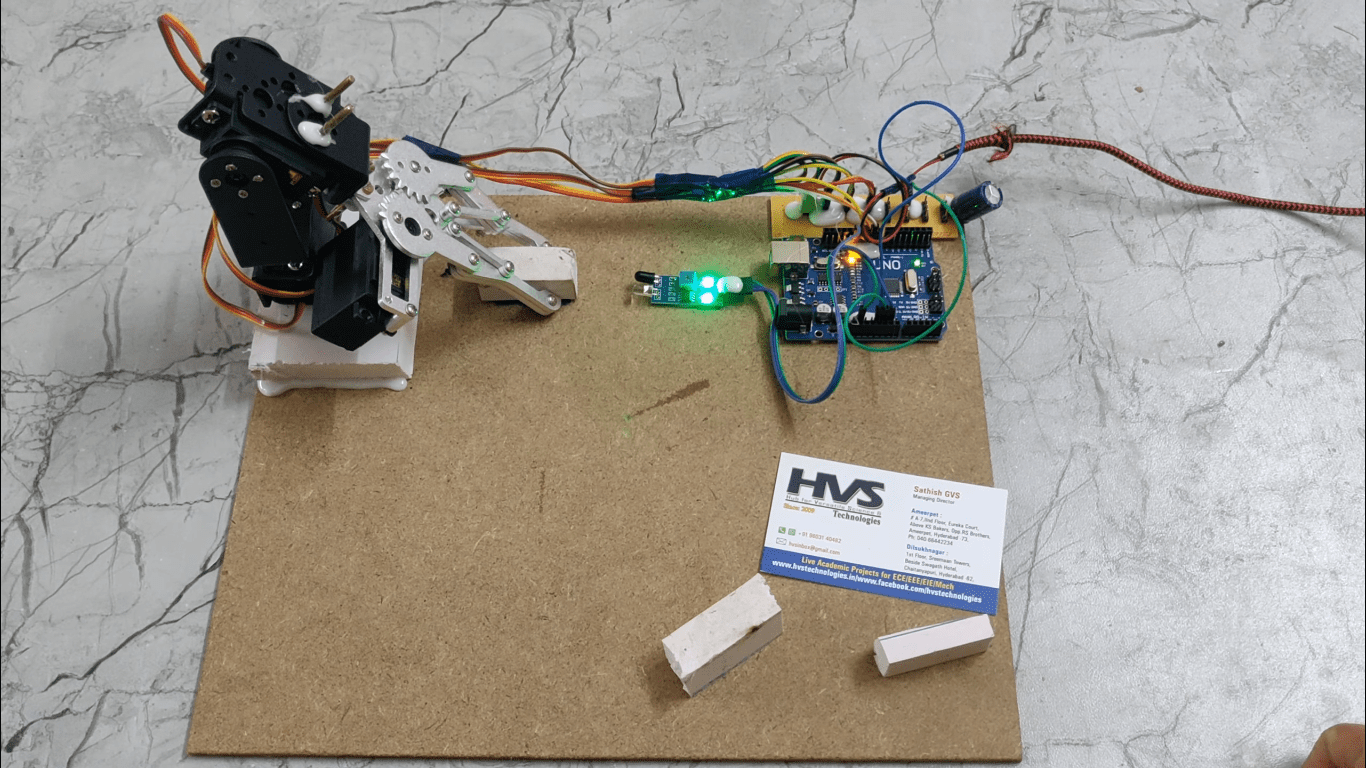
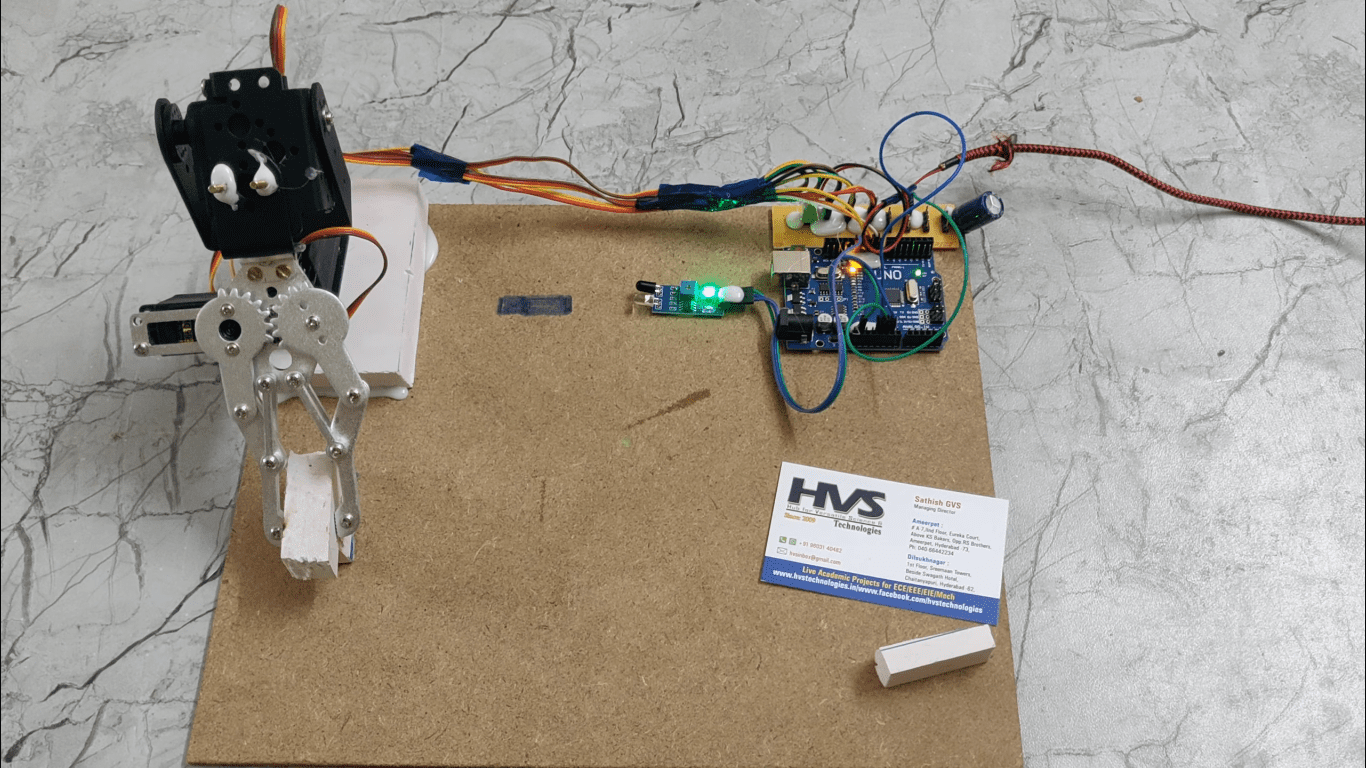
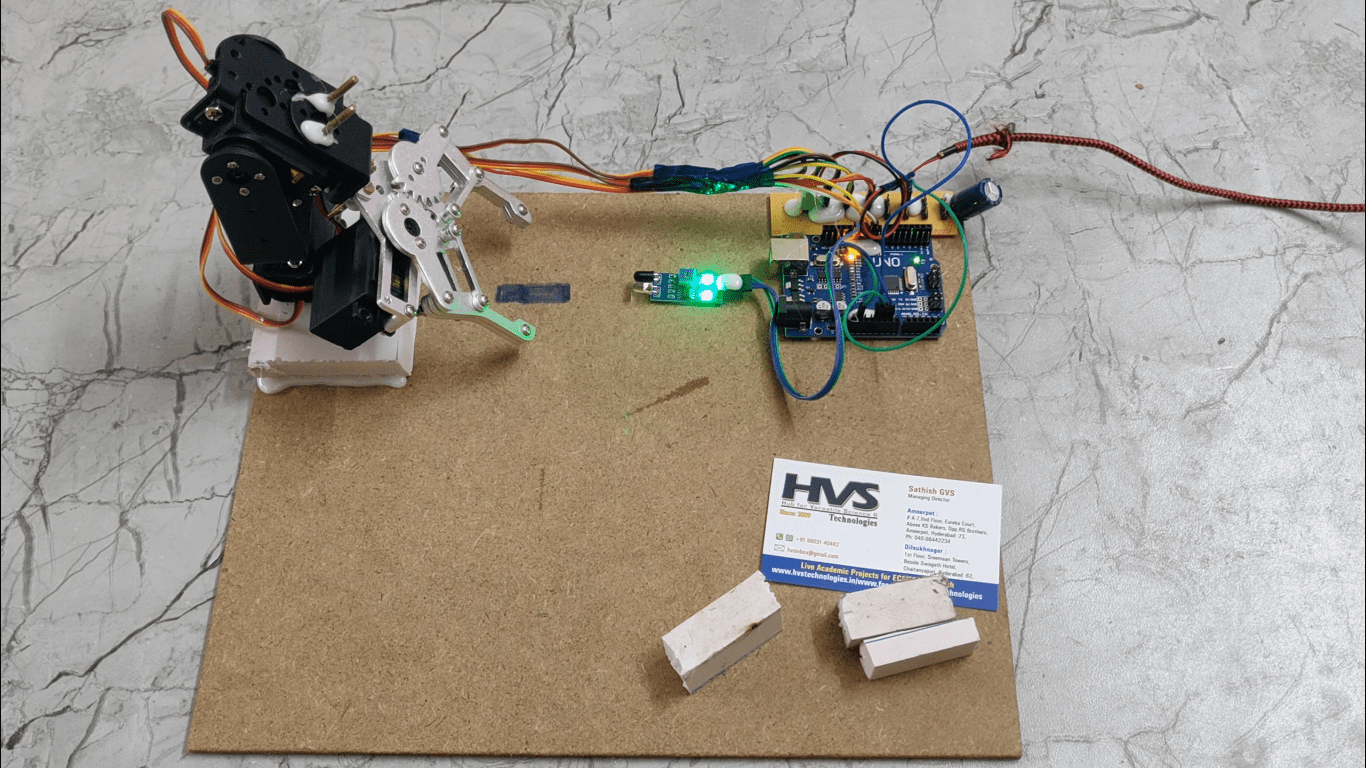
The project aims in designing a Robotic arm which is capable of Picking and Placing of many objects from one place to another place.
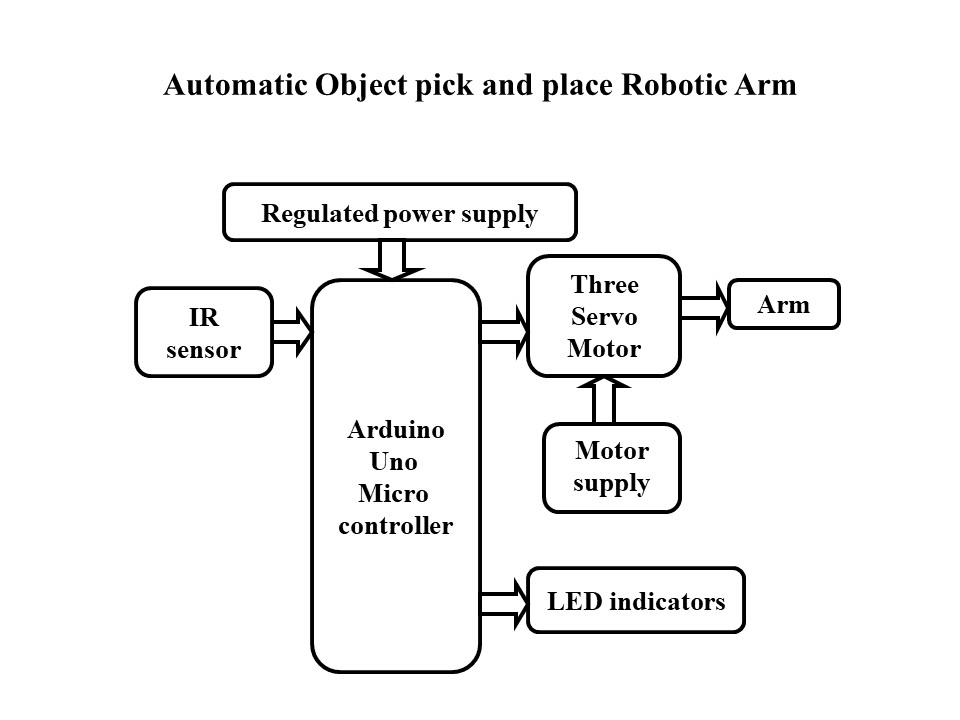
To develop this robotic ARM we are using three servo motors which is connected to the Arduino. Base servo motor is used for arm left and wright motion. Middle servo is used for up and down motion and end servo motor is used for gripper open and close.IR sensor is used to detect the obstacles.
When the user places the object Infront of the IR sensor. This data process to the Arduino. Then Arduino will control the robotic arm through servo motors for pick and place the objects from one place to another place. To achieve this task loaded program written in embedded C language.
The main objectives of the project are:
- Design a Robotic arm which is capable of Picking and placing objects.
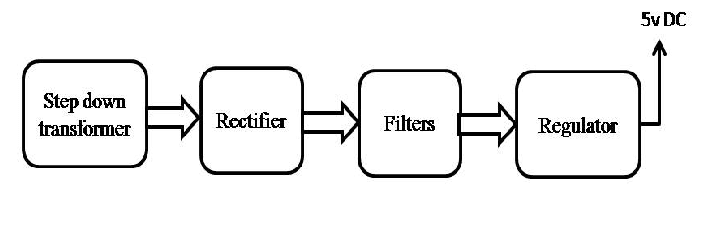
- Power Supply.
- ARDUINO UNO Microcontroller.
- THREE SERVO MOTORS.
- IR SENSOR.
- GRIPPER.
- Embedded C programming.
- Arduino IDE for dumping code into Micro controller.
- Express SCH for Circuit design