Subtotal ₹18,000.00


This study focuses on the development of an autonomous vehicle equipped with advanced perception and navigation capabilities. The robot employs state-of-the-art computer vision techniques for lane following, traffic sign detection, and object detection and classification. A robust lane following algorithm ensures the robot's ability to navigate complex road environments autonomously, while the integration of a sophisticated traffic sign detection system enhances its responsiveness to regulatory signals.
Furthermore, the inclusion of an advanced object detection and classification module empowers the robot to identify and respond to various obstacles in its path also recognized object name will display on bounding box. The combination of these features results in a highly adaptive and intelligent autonomous robot capable of navigating real-world scenarios with precision and safety. The proposed system showcases the potential of integrating multiple perception tasks into a unified framework, contributing to the advancement of autonomous robotic systems in dynamic environments.
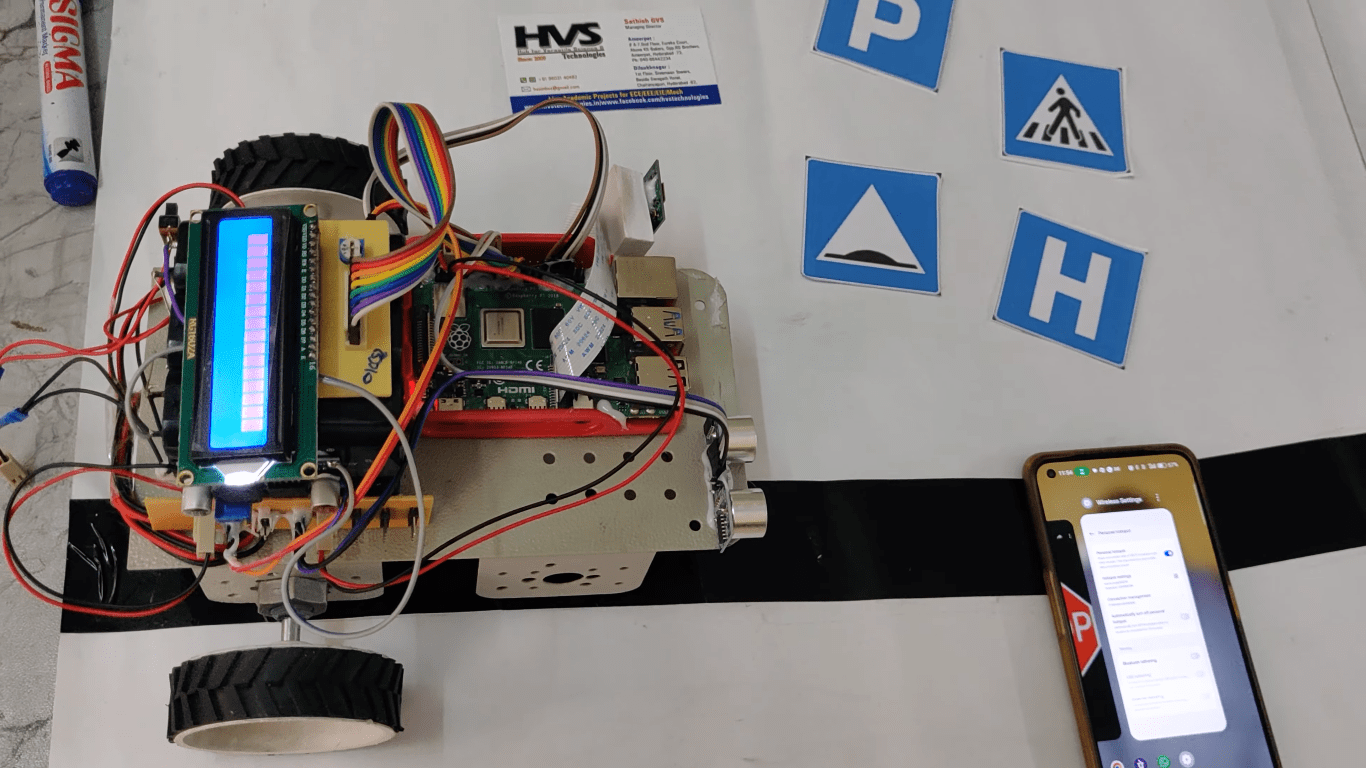
Self-driving vehicle are autonomous vehicles that can drive by themselves without any human interference and has the potential to mark the technological revolution of the next decade. This work presents the development of a low-cost prototype of a miniature self-driving vehicle model using simple and easily available technologies. For safe driving and to avoid accidents, it is important to detect the traffic signs on the road and to take the decisions in real time. The purpose of this work is to build a system that autonomously maneuvers itself on a track by recognizing road signs. In order to do this, it should be able to record the road ahead in real time, and accurately identify the road signs and take corresponding response within the stipulated time.
Features:
 video:
[/iframe
video:
[/iframe
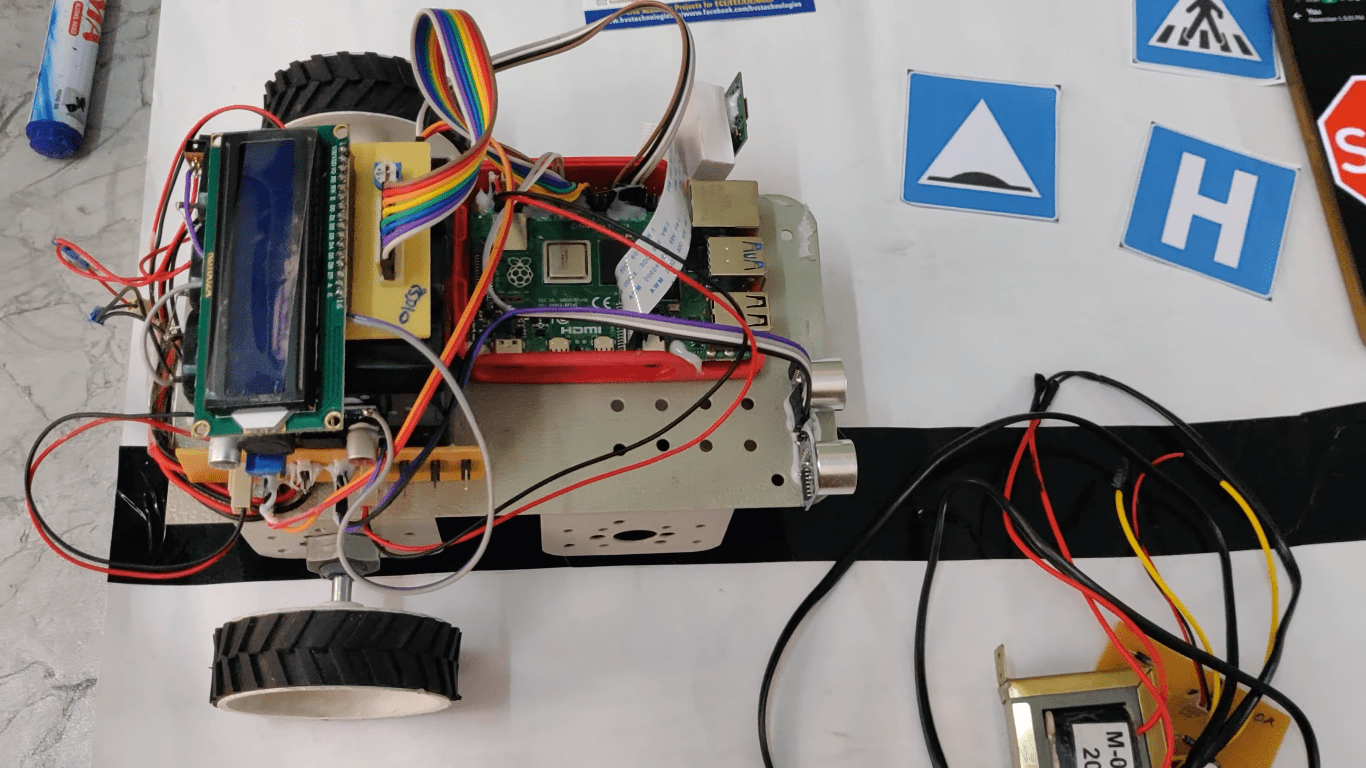
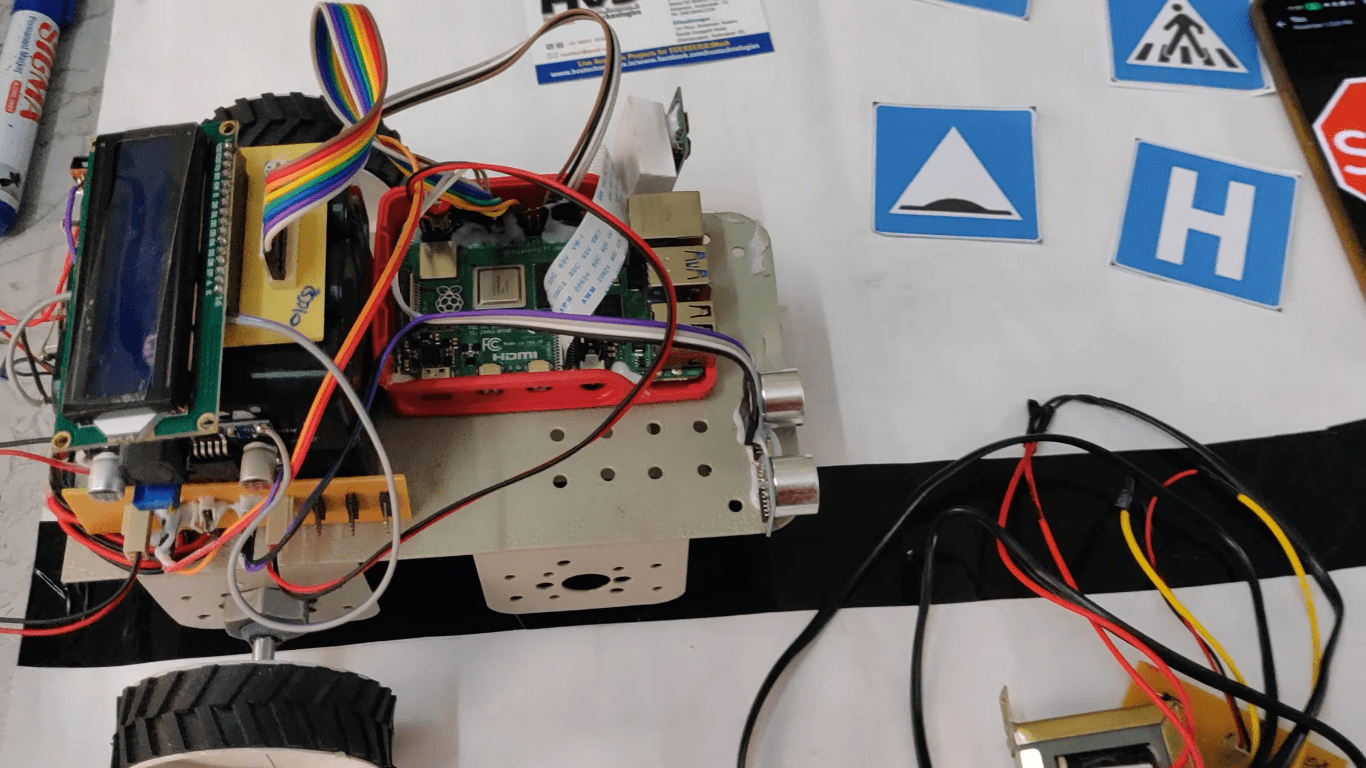
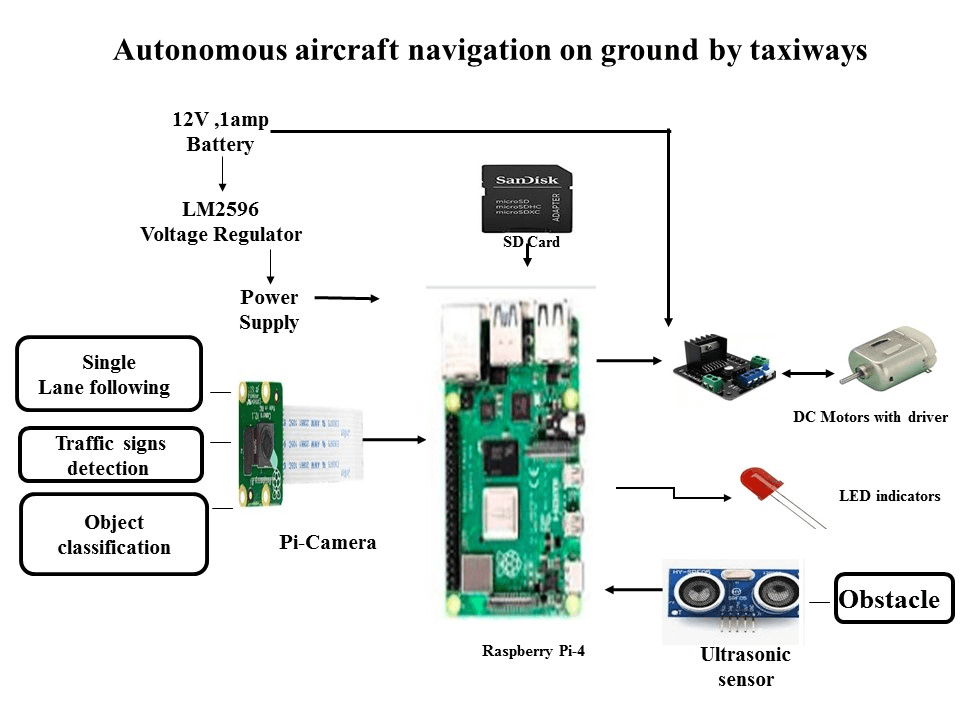
- Design a self-driving car which can be follow the single lane and traffic signs.
- The robot consists of pi camera and Raspberry pi4 module which is used to detect the singe lane, traffic signs and object classification using raspberry pi4 and OpenCV Image processing.
- Ultrasonic sensor-based obstacle detection and ignition control.
- To achieve this task using raspberry pi4 processor.
- 12v Rechargeable Battery.
- Lm2596voltage regulator.
- Raspberry Pi4 Processor.
- SD Card.
- Pi camera.
- LED indicators.
- DC motors with L293d moor driver.
- Robot chassis.
- Ultrasonic Sensor.
- Python Language.
- Raspbian OS.
- OpenCV Image processing.
 video:
[/iframe
video:
[/iframe 






