No products in the cart.


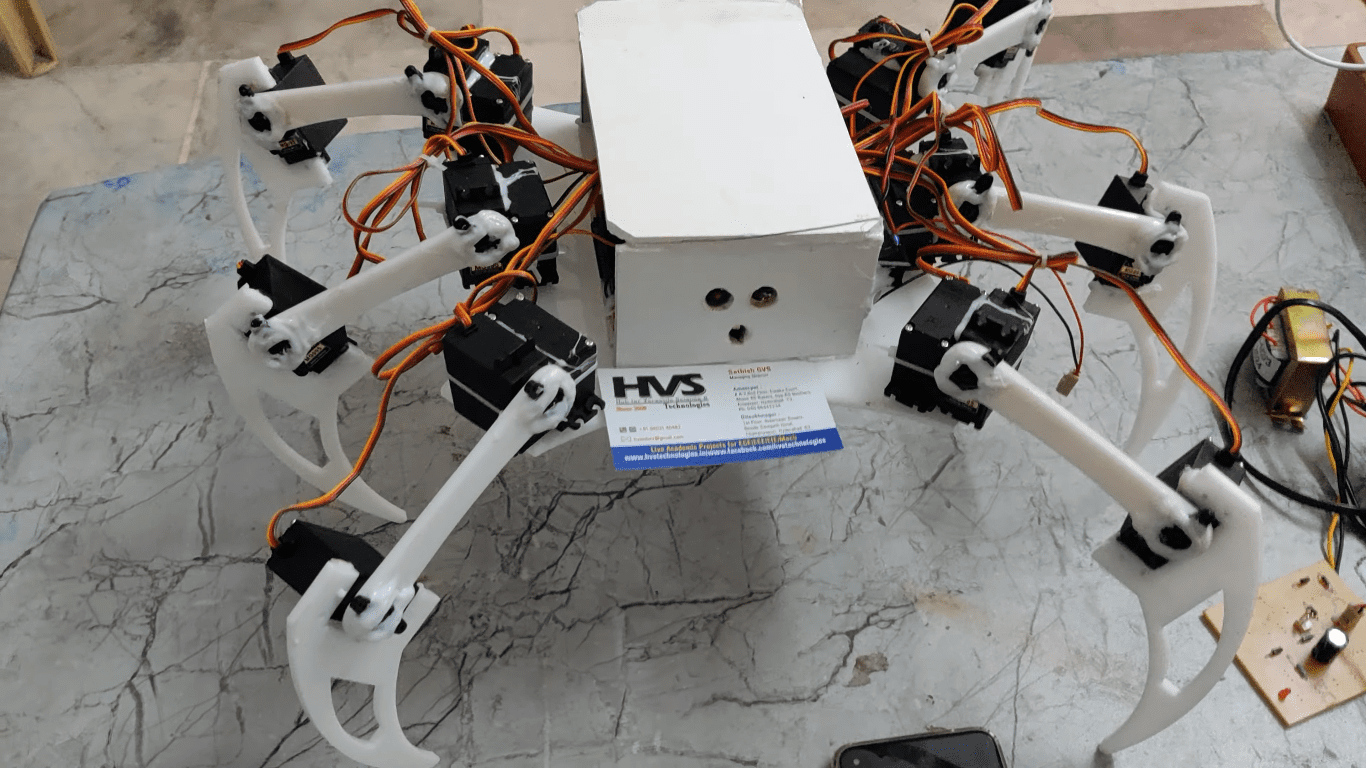


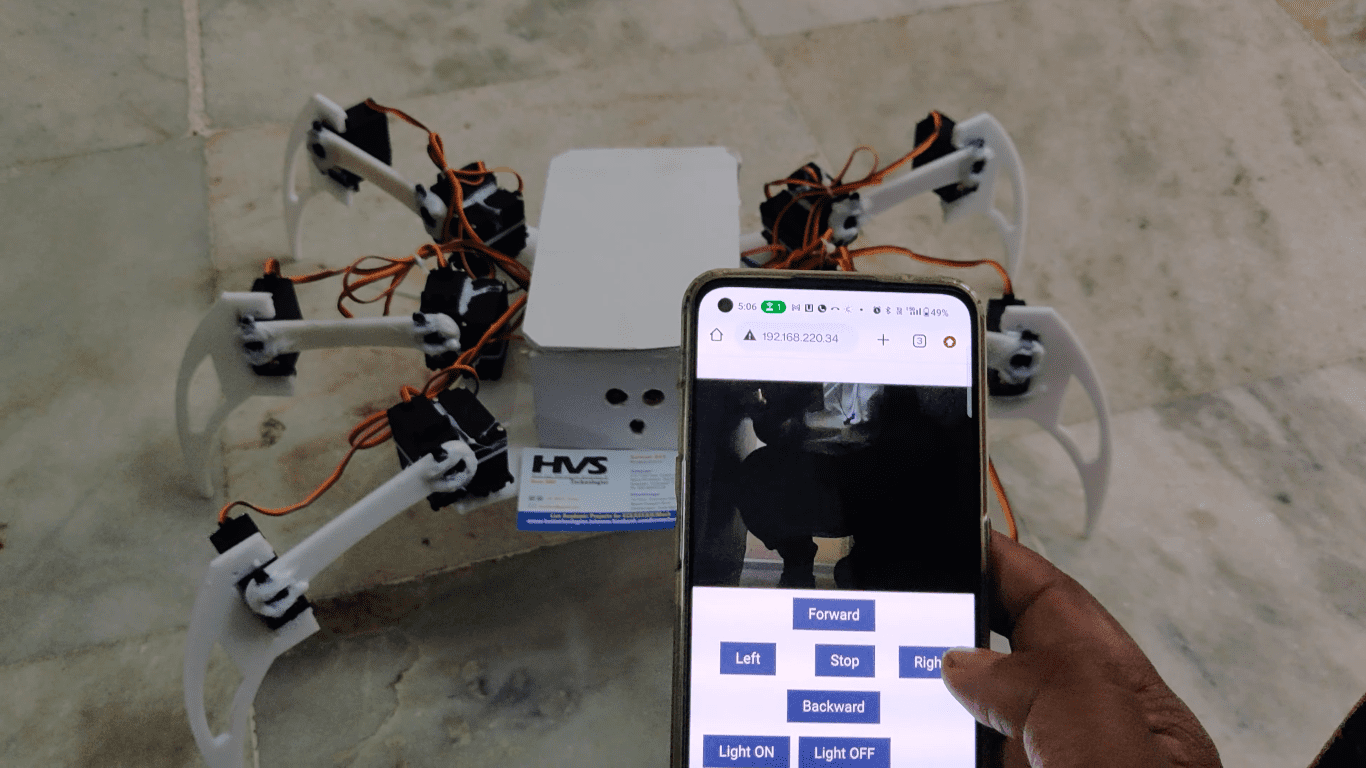
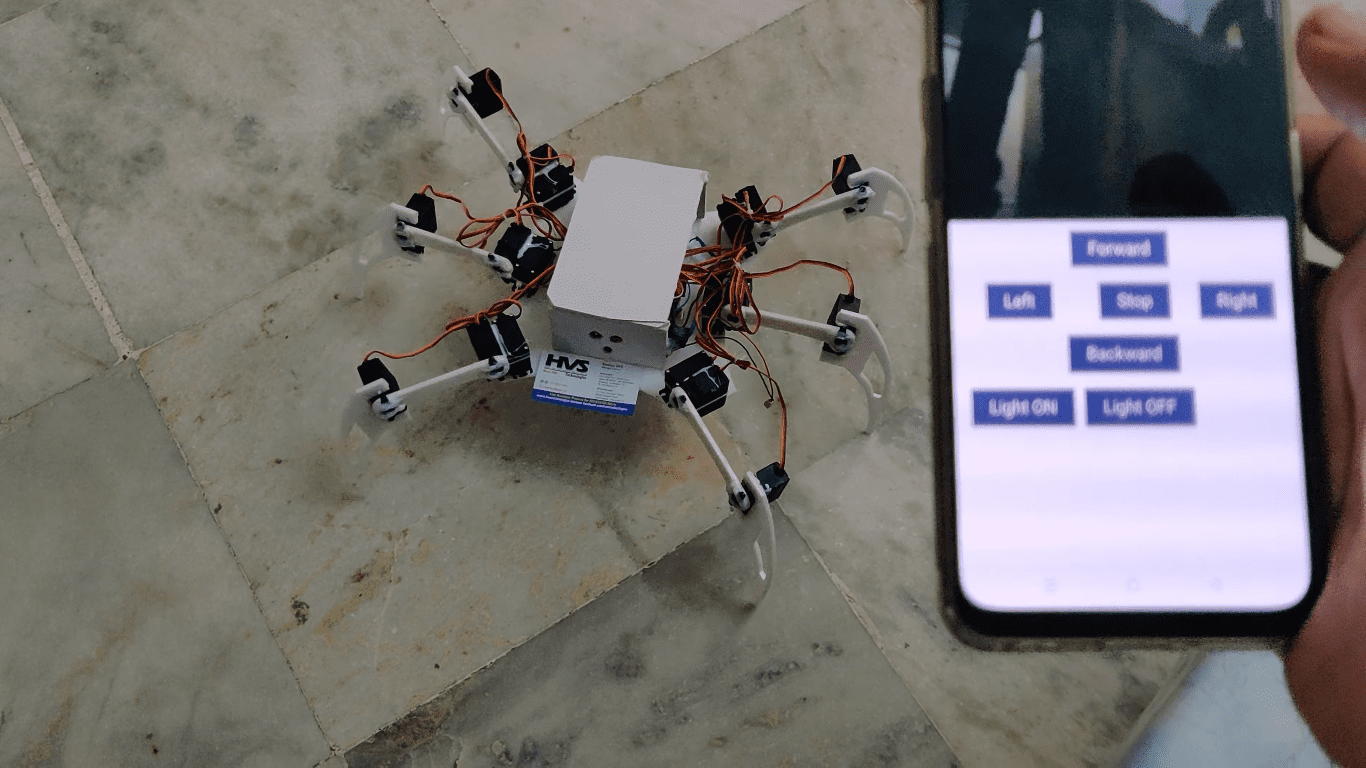
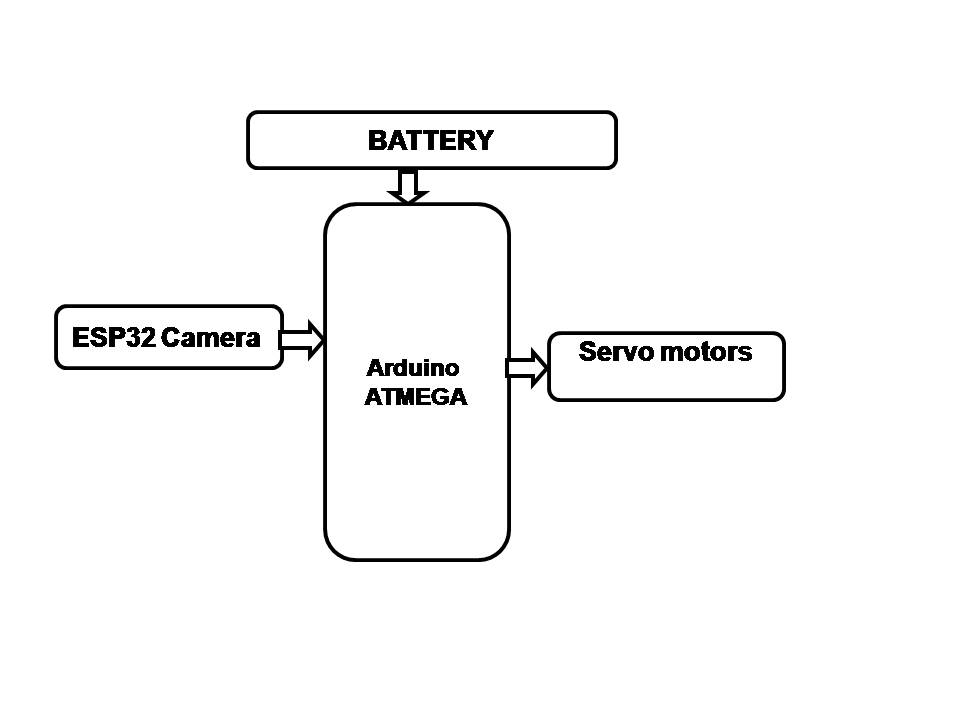
The "Hexapod - 6-Legged Walking Spider" is an advanced robotic platform designed to demonstrate the integration of various technologies for enhanced mobility and real-time streaming capabilities. The hexapod features a six-legged walking mechanism that enables versatile and stable movement across diverse terrains, mimicking the gait patterns of a spider to achieve dynamic locomotion. The system is powered by a lithium-ion battery, ensuring extended operational time and reliability. Central to the hexapod’s functionality is an ESP32 camera module, which facilitates live streaming of visual data, providing real-time feedback and monitoring capabilities with mobile. Control and coordination of the robot’s movements are managed by an Arduino Mega, which interfaces with 18 servo motors to execute precise leg movements and maintain balance. An LM2596 voltage regulator is employed to ensure stable power supply and efficient operation of the various electronic components. This project highlights the synergy between mechanical engineering, electronics, and software, showcasing the potential of combining these elements to create an autonomous, versatile robotic platform with real-time streaming capabilities.
The main objectives of the project are:
 video:
[/iframe
video:
[/iframe
- Integrate Real-Time Streaming: Incorporate an ESP32 camera module to provide live streaming capabilities. This allows for real-time video feedback, enabling remote observation and interaction with the robot.
- Ensure Efficient Power Management: Utilize a lithium-ion battery in conjunction with an LM2596 voltage regulator to provide a stable and reliable power supply for the entire system, ensuring prolonged operational time and efficient energy use.
- ARDUINO MEGA
- LI-ION BATTERY
- 18 SERVO MOTORS
- ESP32 CAMERA
- LM2596
- Arduino MEGA compiling and dumping code into Microcontroller
- Express SCH for Circuit design.
 video:
[/iframe
video:
[/iframe 






