No products in the cart.


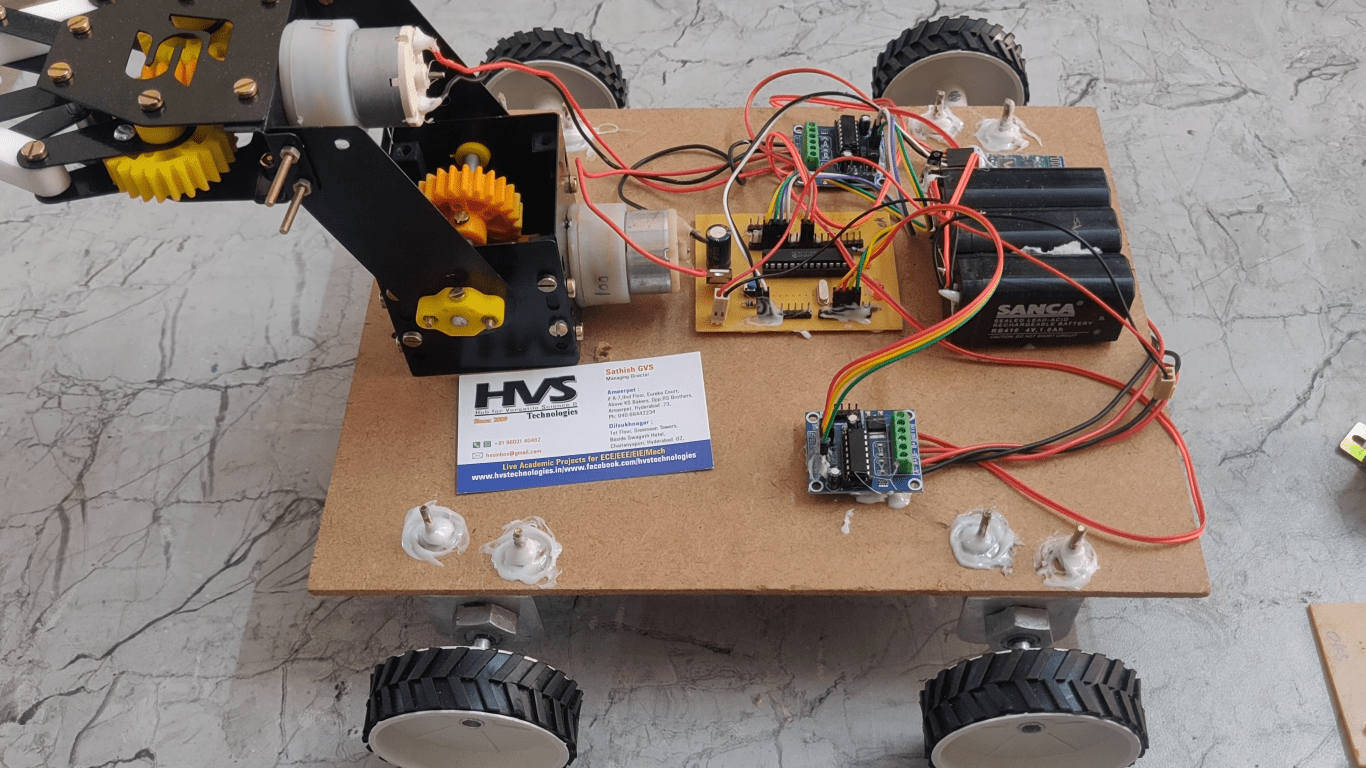

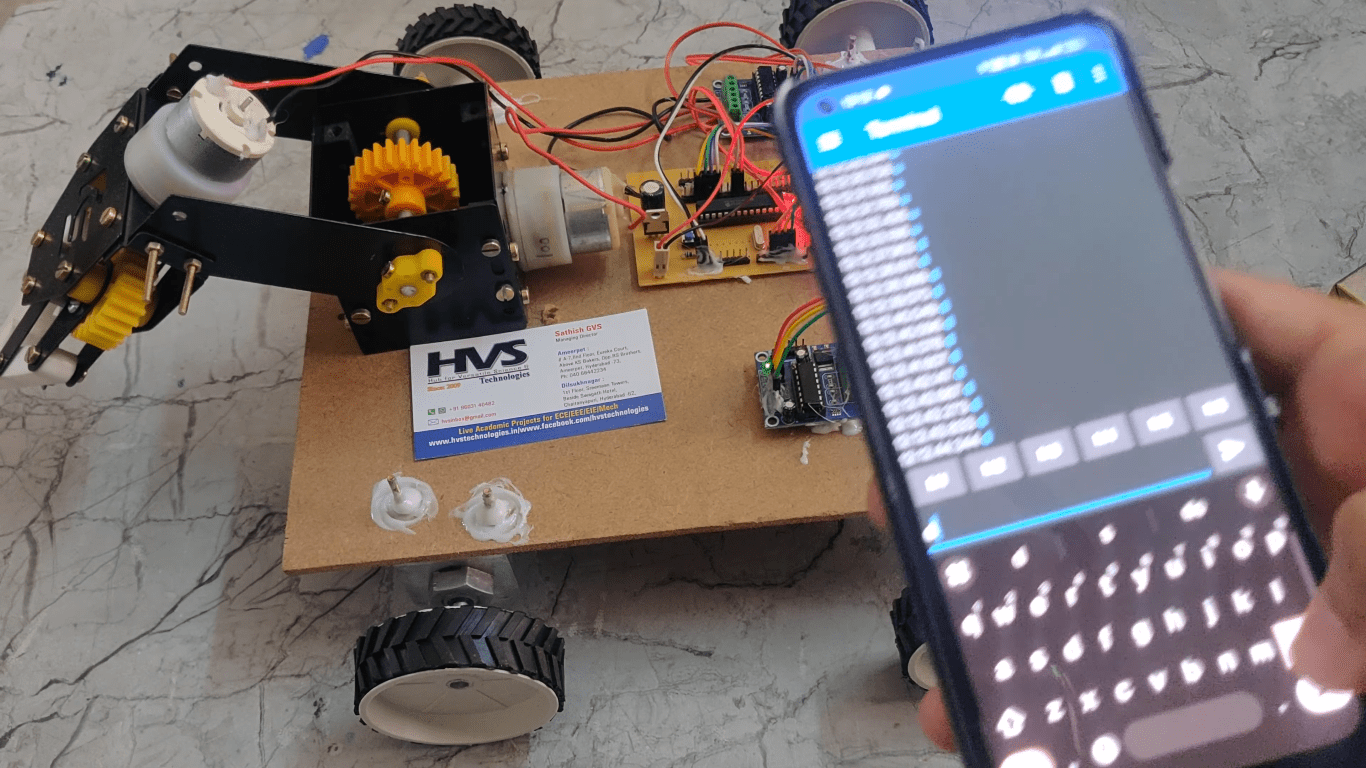
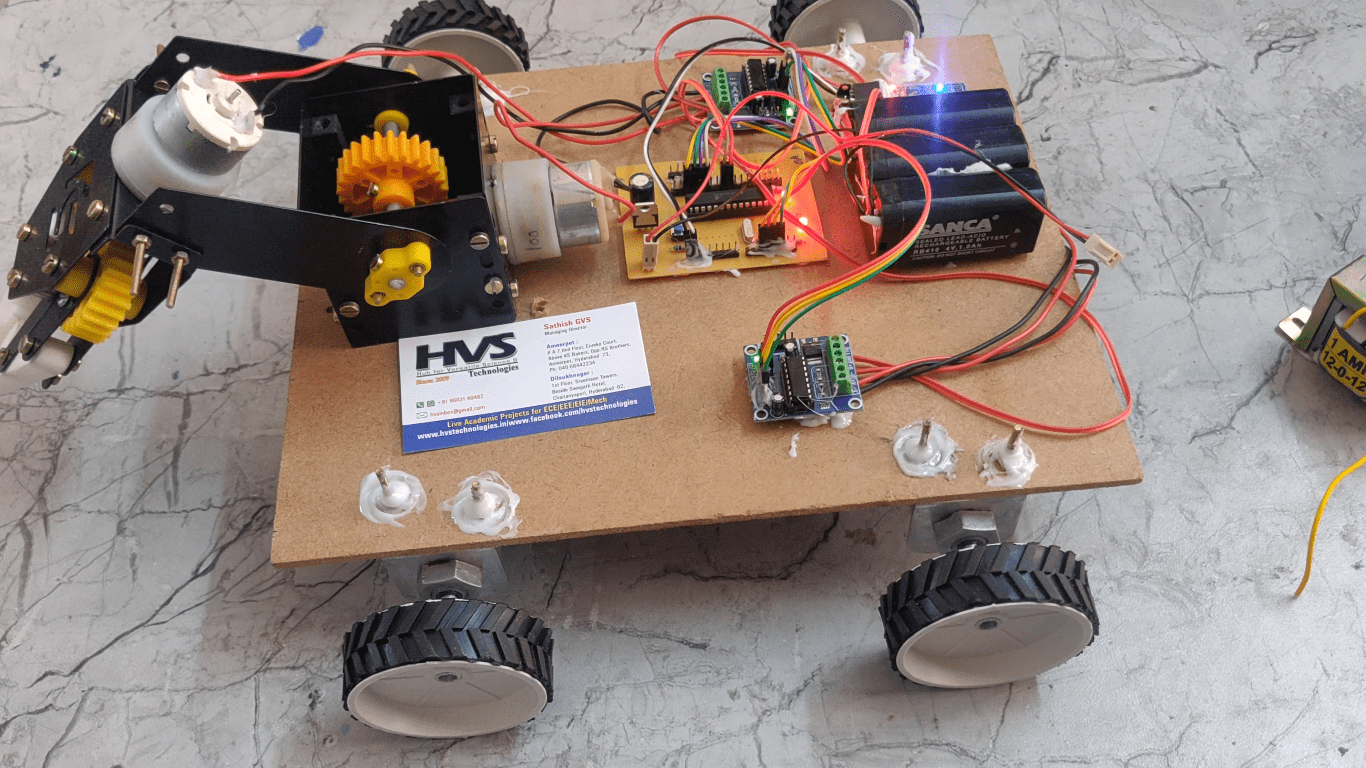
The project aims in designing a Robotic ARM which is operated using android smart phone wirelessly using Bluetooth from a remote location and also which is capable of Picking and Placing of many objects.
The advent of new high-speed technology and the growing computer
Capacity provided realistic opportunity for new robot controls and realization of new methods of control theory. This technical improvement together with the need for high performance robots created faster, more accurate and more intelligent robots using new robots control devices, new drivers and advanced control algorithms. This project describes a new economical solution of robot control systems. The presented robot arm control system can be used for different sophisticated robotic applications.
Bluetooth is an open standard specification for a radio frequency (RF)-based, short-range connectivity technology that promises to change the face of computing and wireless communication. It is designed to be an inexpensive, wireless networking system for all classes of portable devices, such as laptops, PDAs (personal digital assistants), and mobile phones. It also will enable wireless connections for desktop computers, making connections between monitors, printers, keyboards, and the CPU cable-free.
The modules in the project are: Bluetooth modem for establishing wireless communication, Robot arm which is capable of Picking and placing objects, DC motors is attached to the robot arm for the movement of the robot and Microcontroller which performs the controlling operations of Robot arm in Picking and Placing of objects.
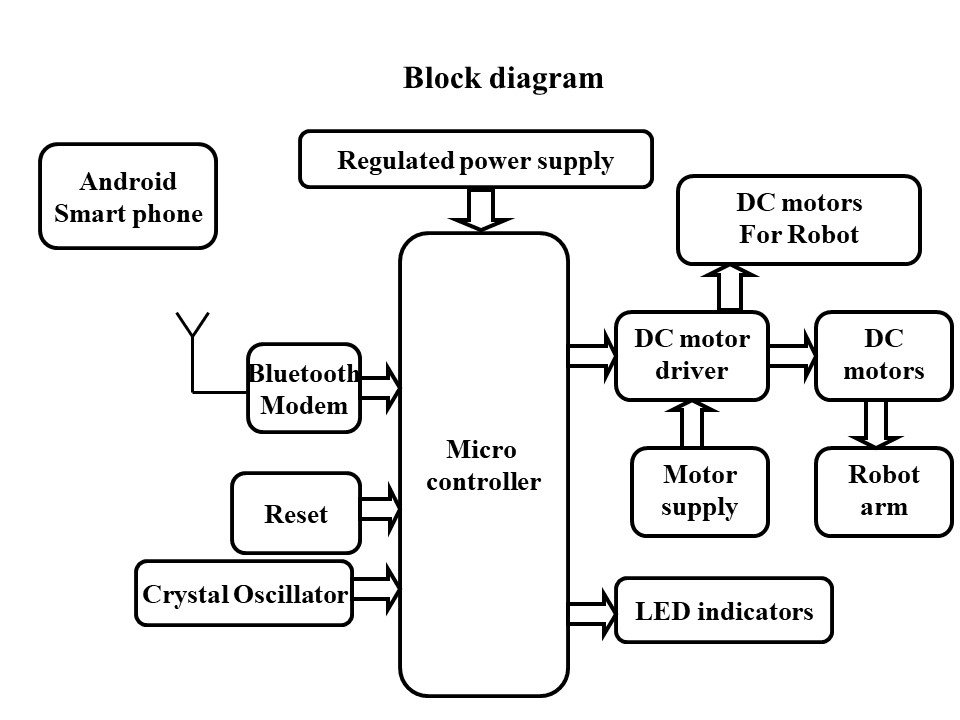
The controlling device of the whole system is a Microcontroller to which Bluetooth modem; DC motors of robot arm are interfaced through a motor driver. Whenever the appropriate keys are pressed in the android application, the data related to those keys will be transmitted over Bluetooth. This data will be received by Bluetooth modem at robot arm and this data is fed as input to the controller. The Microcontroller checks the data with the program embedded in it and performs appropriate actions on the robot arm. The Microcontroller is programmed using Embedded C language. Block Diagram:
video:
Block Diagram:
video:
The main objectives of the project are:
- Controlling of robot through Android Smart phone wirelessly.
- Wireless Bluetooth communication.
- Pick and Place of objects.
- Interfacing of Bluetooth modem and Microcontroller.
- DC motor operation and need for motor driver.
- Embedded C programming.
- PCB designing.
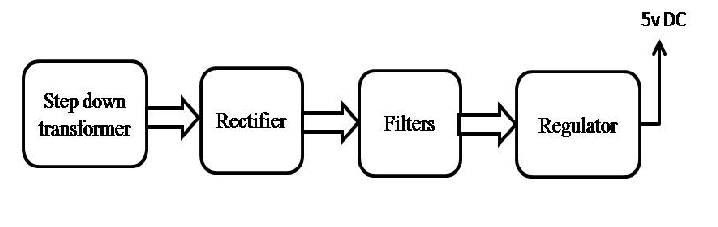
- Regulated Power Supply.
- Microcontroller.
- Android Smart phone
- DC motors with driver.
- Robot arm.
- Bluetooth modem.
- Reset.
- Crystal oscillator.
- LED indicators.
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
 Block Diagram:
Block Diagram:
 video:
video: