No products in the cart.


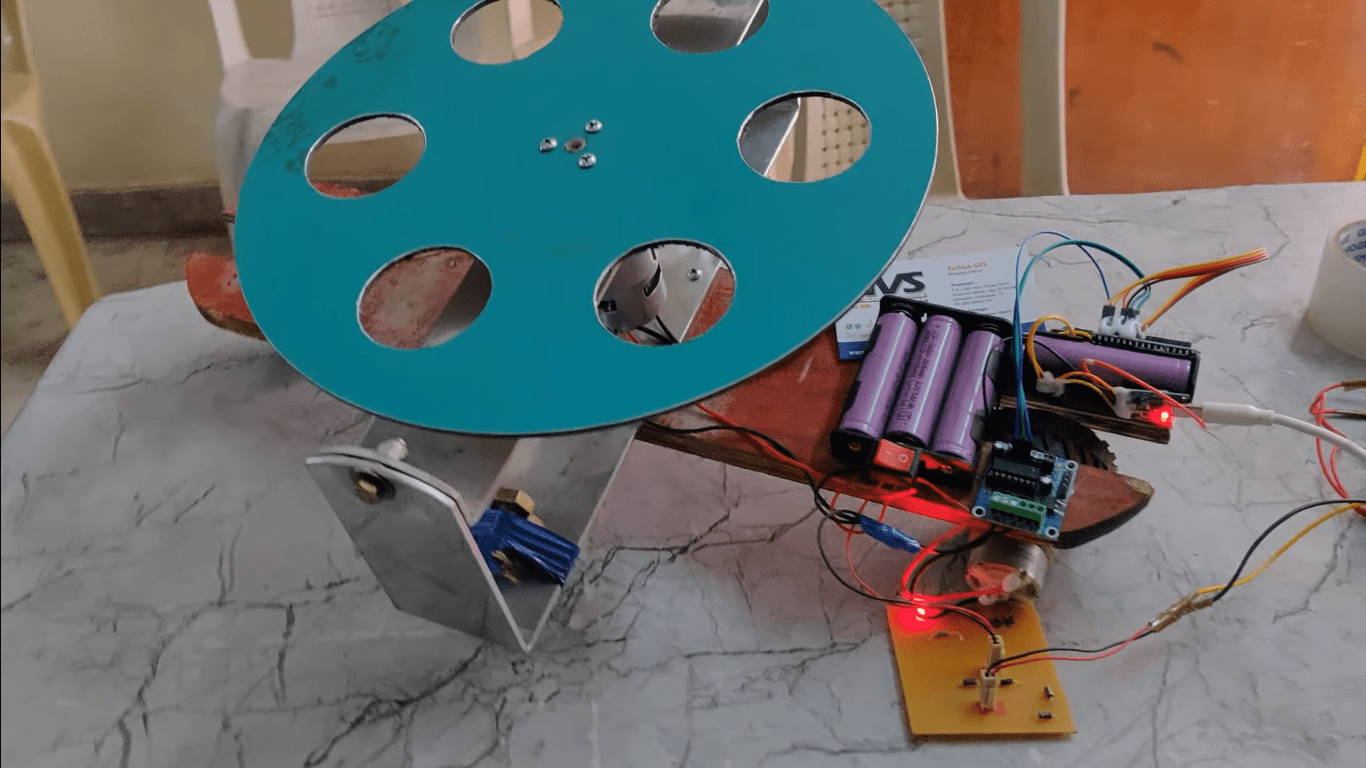

The project work outlines the design and development of a self-balancing vehicle. The project aimed to create a compact, lightweight, and energy-efficient vehicle that could maintain balance without the need for a rider\'s input. The prototype was built using a combination of electronic components, balancing mechanism and programming that allowed the vehicle to maintain balance.
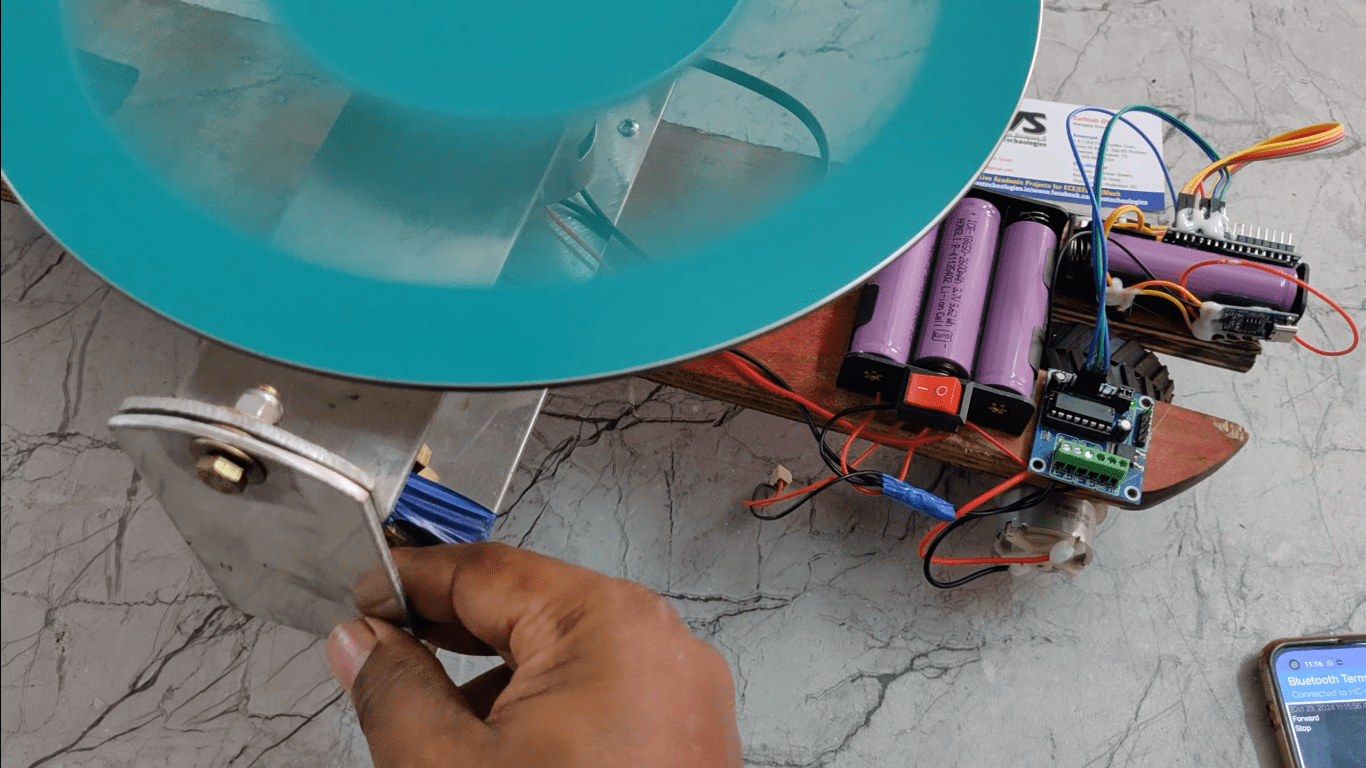
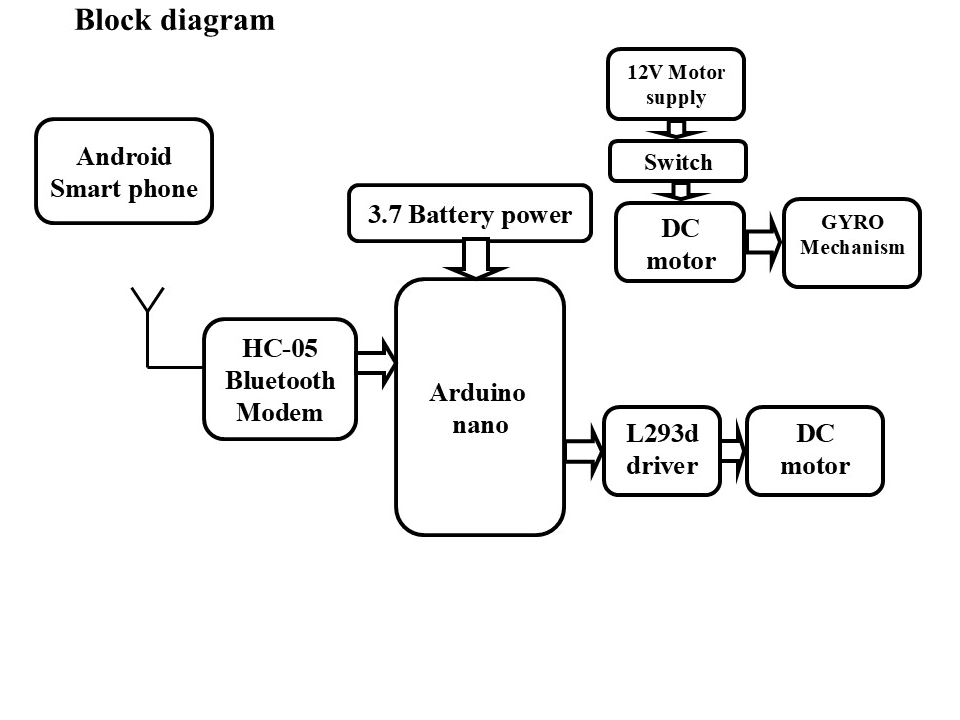
The vehicle\'s balancing system was developed using a combination of gyro mechanism, and a microcontroller to adjust the vehicle\'s balance. Additionally, the vehicle was equipped with a motor, Bluetooth module and a Battery to allow for movement. By using Bluetooth mobile application user can control the vehicle movement like forward and backward through android mobile wirelessly. The vehicle\'s energy consumption was also significantly lower than that of similar vehicles, making it an efficient and environmentally-friendly mode of transportation. Overall, the project was successful in achieving its goals of designing and developing a self-balancing vehicle. With further refinement and testing, the vehicle has the potential to become a viable mode of transportation for short distances in urban environments. The controlling device of the whole system is an arduino nano. Bluetooth modem, DC motor along with BIKE is interfaced to the arduino. Whenever the appropriate keys are pressed in the android application, the data related to those keys will be transmitted over Bluetooth. This data will be received by HC-05 Bluetooth modem and same as fed input to the controller. Gyro mechanism will maintain the self-balancing of vehicle. The Microcontroller checks the data with the program embedded in it and moves the bike accordingly. The Microcontroller is programmed using Embedded C language. The main objectives of the project are:- To identify bicycle instability in both static and dynamic conditions.
- To keep the bike stable and prevent sideways falls.
- Battery power supply.
- Arduino Nano.
- HC-05 Bluetooth module
- L293D Motor driver.
- DC motors.
- Gyro mechanism.
- LED indicators.
- Arduino ide studio compiler for dumping code into Microcontroller.
- Express SCH for Circuit design.
- Embedded C language.
 video:
video:







