No products in the cart.


The integration of robotics with web technologies has opened new possibilities for remote operation and monitoring. This paper presents a web-controlled robot utilizing a Raspberry Pi as the core processing unit and a Pi Camera for visual feedback. The robot is controlled via a web interface, allowing real-time manipulation of the robot’s movement and camera feed from any device with internet access. The system is designed to be simple, cost-effective, and flexible, ideal for educational, research, or practical applications in remote navigation, surveillance, and exploration.
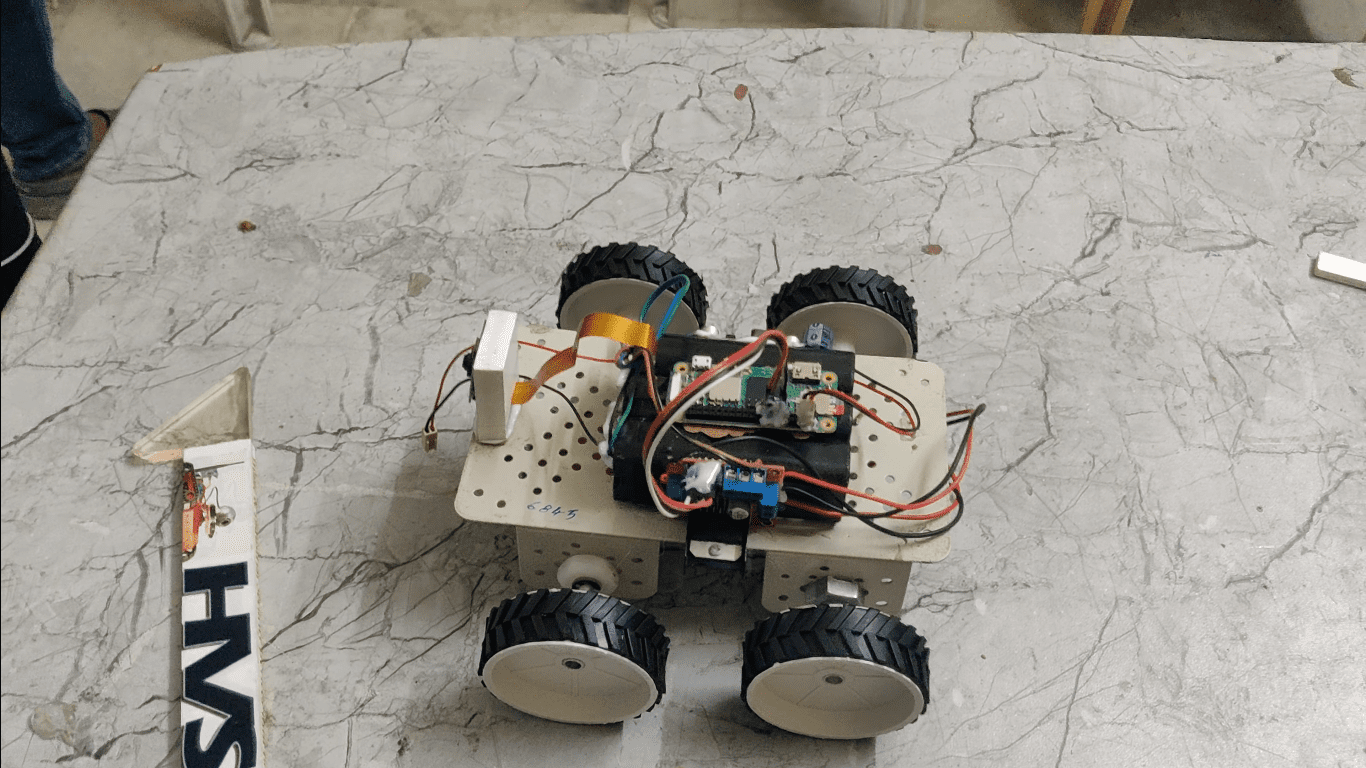
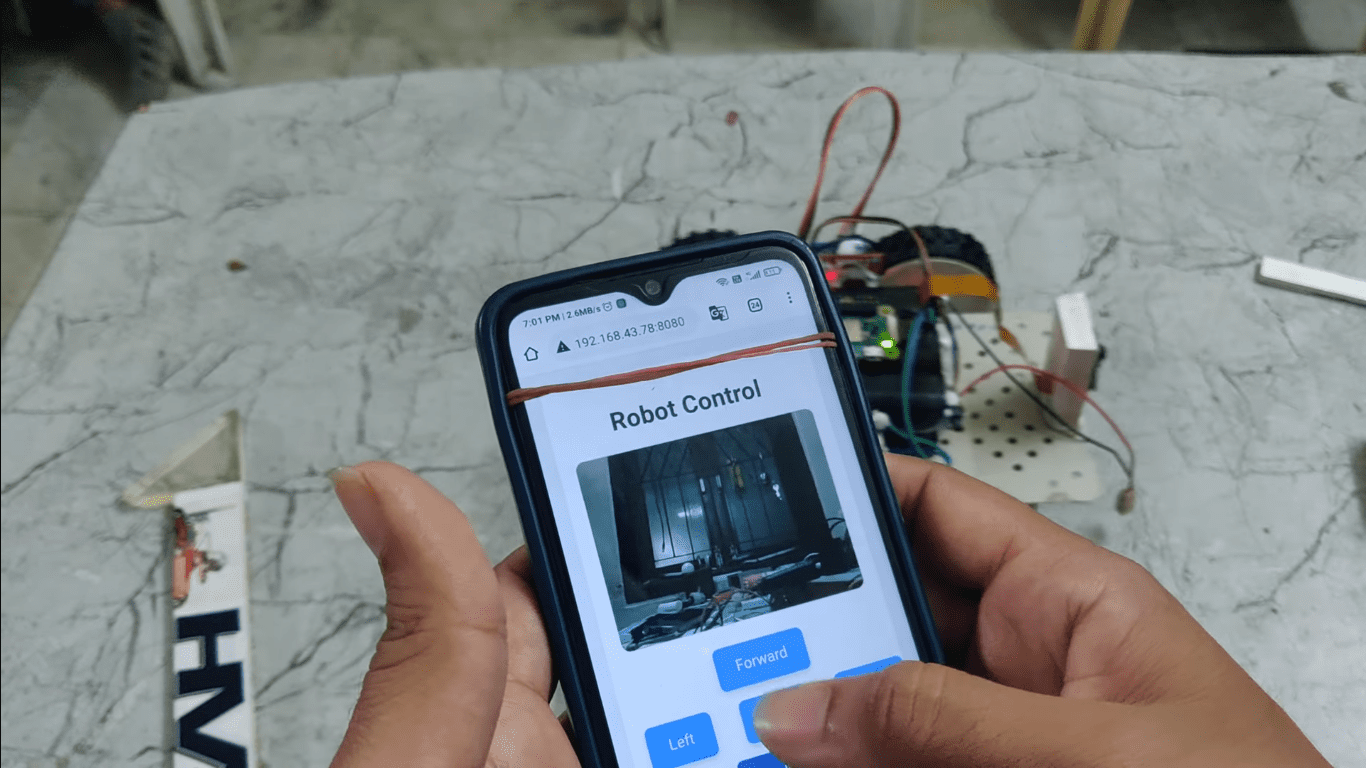
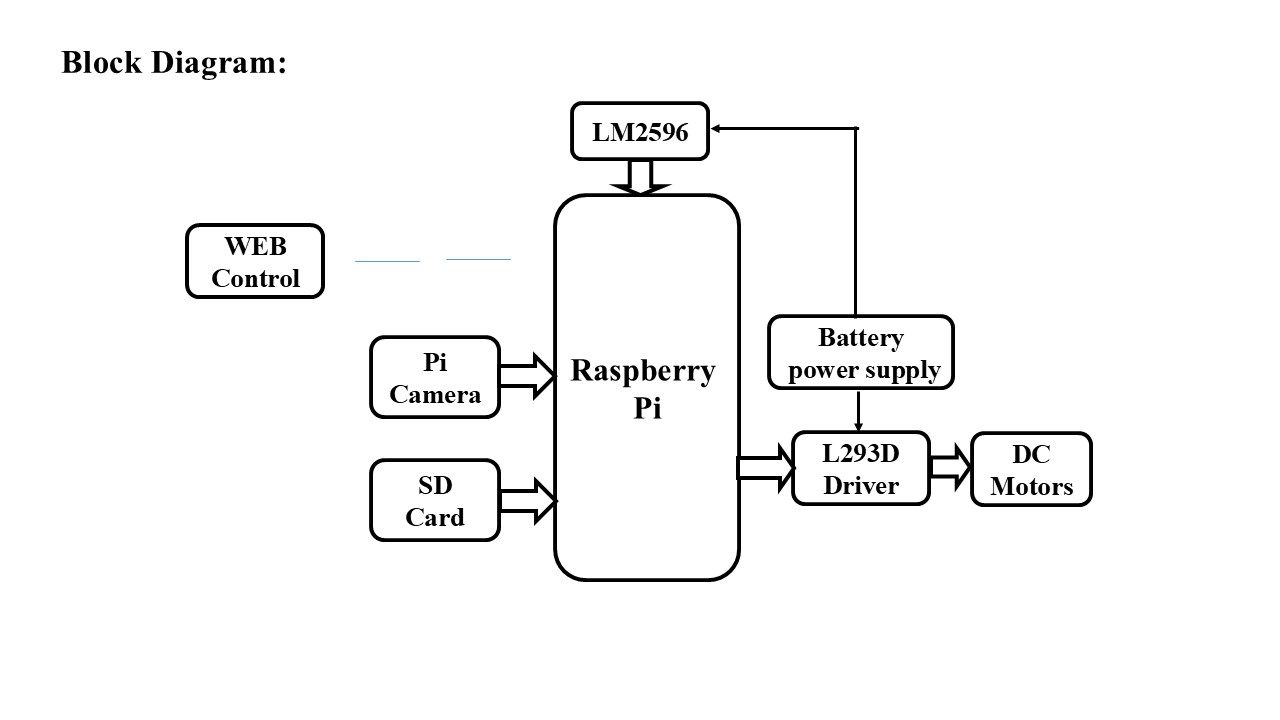
The Raspberry Pi acts as both the brain and the communication hub, running a web server that interfaces with the robot's motors and camera. A user can access the robot through a standard web browser, where the movement commands (forward, backward, left, right) are sent over the network to control the robot’s motors. The Pi Camera provides live video feed to the user, which can be used for navigation, inspection, or surveillance purposes.
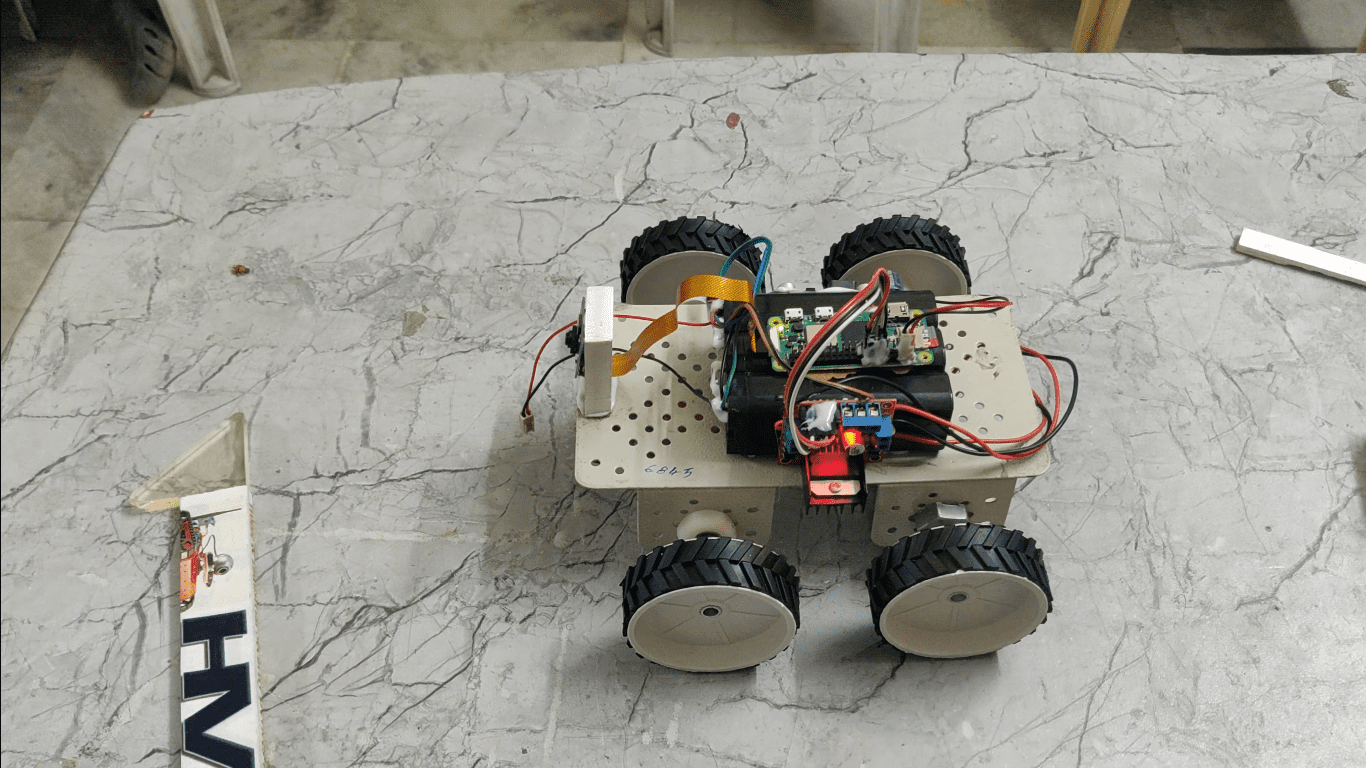
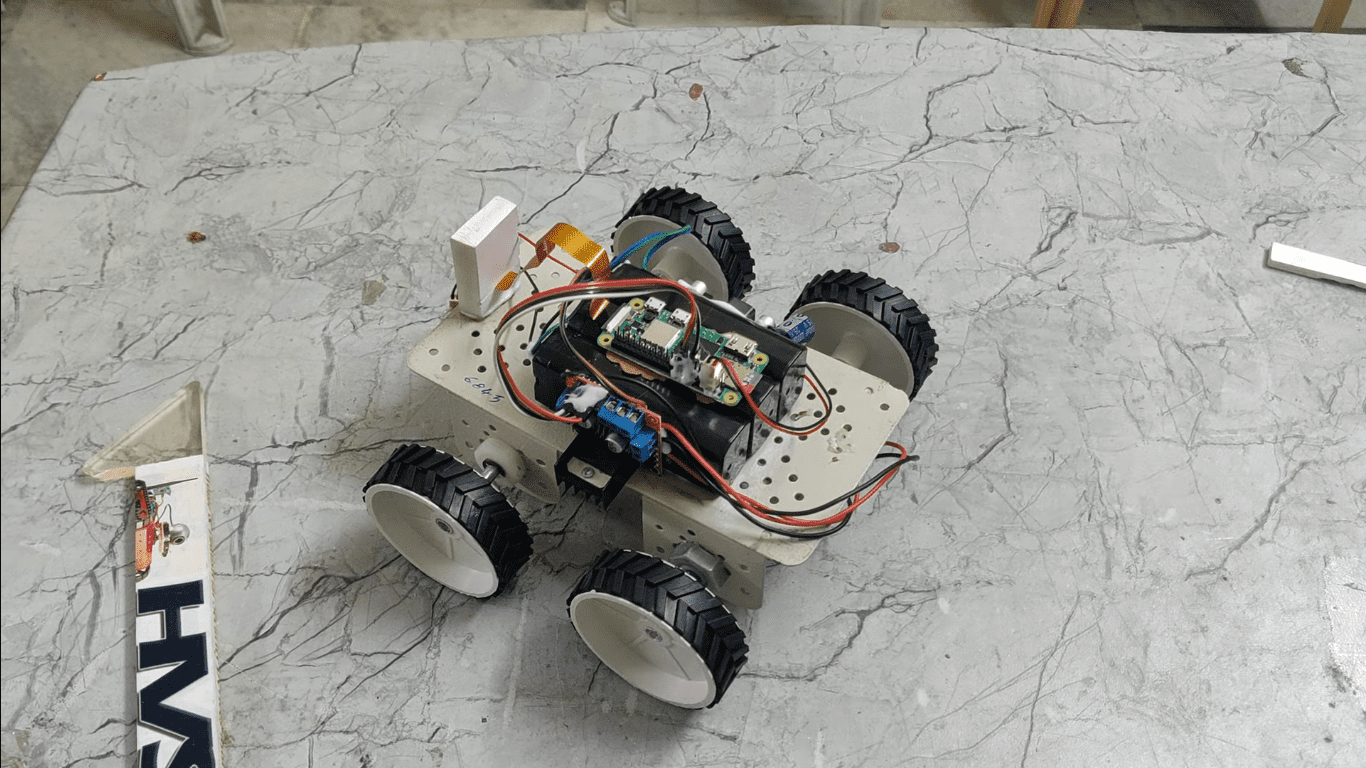
The architecture involves integrating a motor driver with the Raspberry Pi to control the robot's wheels, while the Pi Camera captures the environment and streams the footage through the web interface. The robot's mobility and the camera's real-time feedback are synchronized, providing an intuitive and interactive remote-control experience.
This system demonstrates the feasibility of building an affordable and scalable web-controlled robot using open-source hardware and software, offering a versatile solution for a wide range of applications such as remote surveillance, robotic learning, and teleoperation.
The major features of this project are:
Remote Control of Robot: To design and implement a system that allows the remote control of the robot’s movement (forward, backward, left, right) using a web interface from any internet-enabled device.
Live Video Streaming: To integrate the Pi Camera with the Raspberry Pi to provide real-time video streaming to the user, enabling visual feedback during robot operation.
Wireless Communication: To establish wireless communication between the user device and the robot using Wi-Fi or local network, allowing control and monitoring from any location.
Cost-Effective Solution: To build an affordable and efficient robot that uses low-cost, easily available hardware components such as Raspberry Pi and Pi Camera, making it suitable for educational and research purposes.
Interactive Web Interface: To develop a simple and user-friendly web interface for controlling the robot’s movement and viewing the camera feed, accessible on standard browsers without the need for additional software or complex setups.
The major building blocks of this project are:
 video:
video:
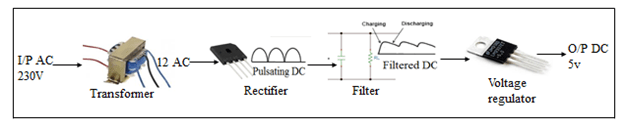
- Battery power.
- Raspberry pi.
- DC motor with L293D Motor driver.
- Pi camera.
- LED indication.
- Linux OS.
- Python language.
- Express SCH for Circuit design.
 video:
video:







