Subtotal ₹33,000.00



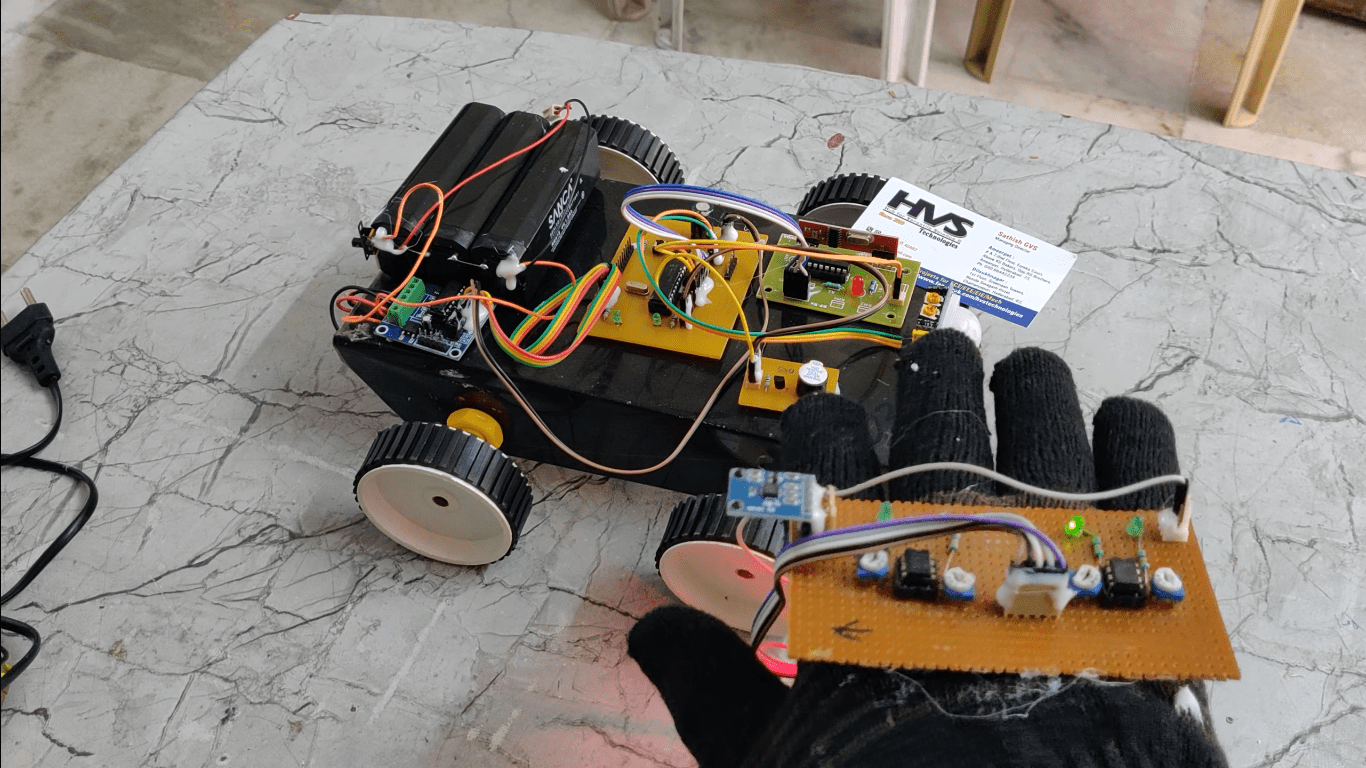
The main aim of this project is to develop a most secure access control system to operate a robot by using MEMS based accelerometer. MEMS is a Micro Electro Mechanical Sensor which is a highly sensitive sensor and capable of detecting the tilt. This sensor finds the tilt and makes use of the accelerometer to change the direction of the robot depending on tilt. For example if the tilt is to the right side then the robot moves in right direction or if the tilt is to the left side then the robot moves in left direction. Robot movement can be controlled in Forward, Reverse, Left and Right direction.
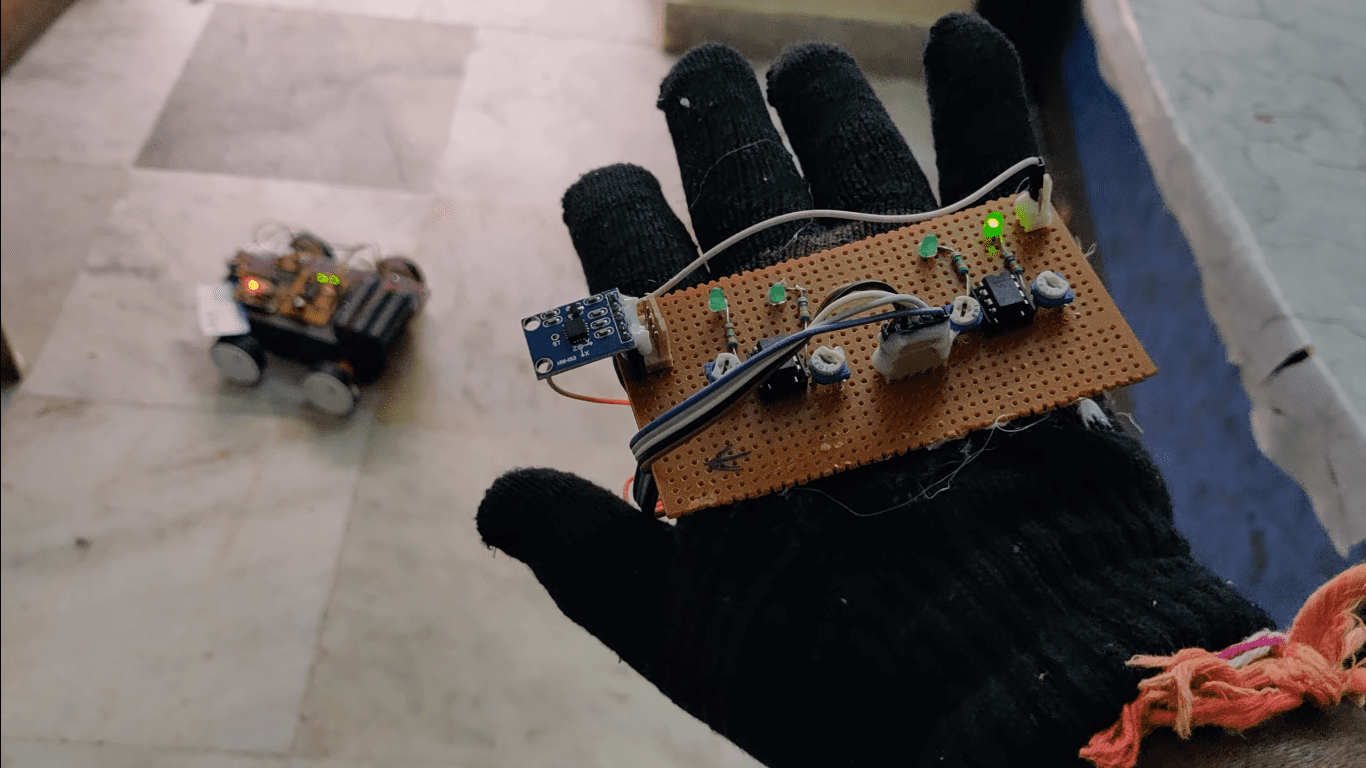
This device is portable and this system operation is entirely driven by wireless RF technology. User can wear it to his wrist like a watch and can operate it by tilting the MEMS Accelerometer sensor and using here PIR sensor also to detect the persons.
RF Communication ranges in between 30 KHz to 300 GHz. RF communication works by creating electromagnetic waves at a source and being able to pick up those electromagnetic waves at a particular destination. These electromagnetic waves travel through the air at near the speed of light. The wavelength of an electromagnetic signal is inversely proportional to the frequency; the higher the frequency, the shorter the wavelength.
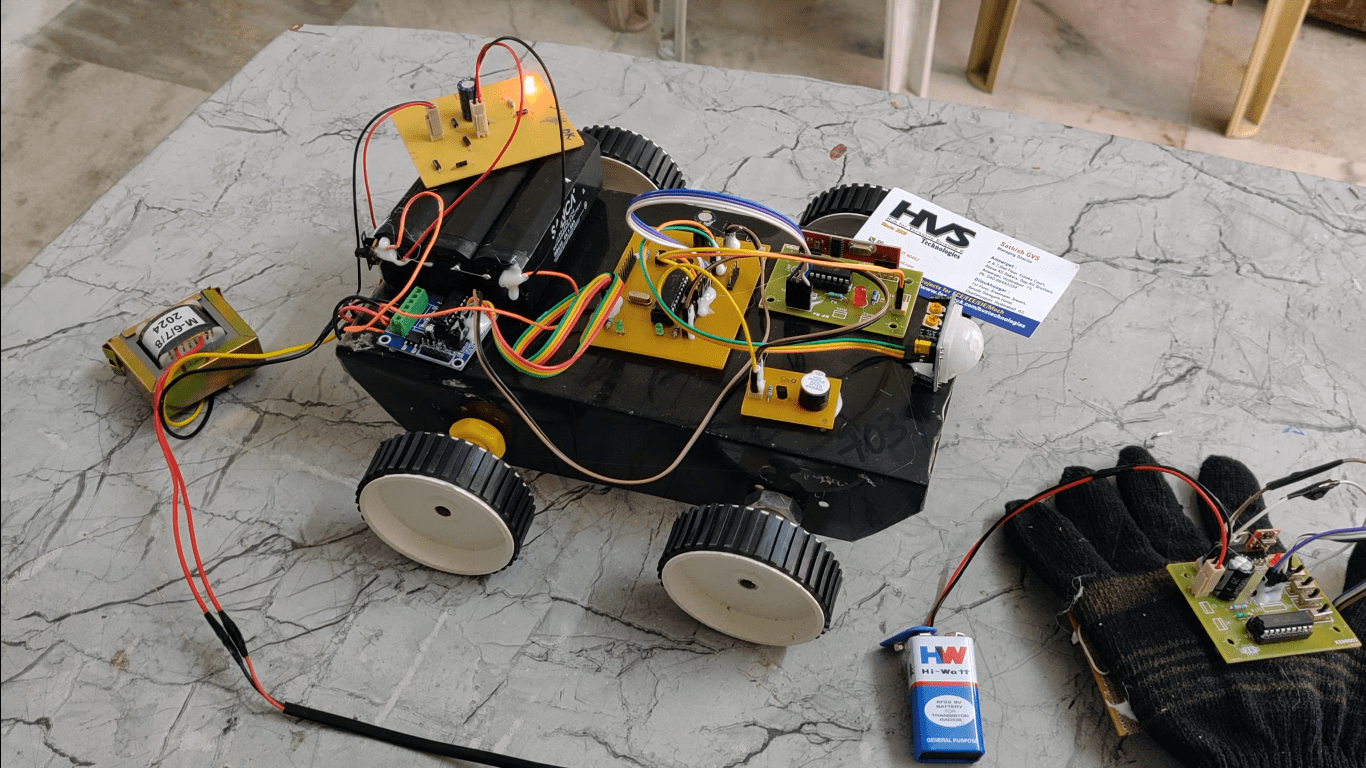
This project makes use of a micro controller, which is programmed, with the help of embedded C instructions. This microcontroller is capable of communicating with transmitter and receiver modules. The MEMS based sensor detects the tilt and provides the information to the comparator and the controller judges whether the instruction is right movement or left movement instruction and controls the direction respectively. PIR for detecting human presence. The controller is interfaced with two dc motors to control the direction of the robot.
The main objectives of the project are:
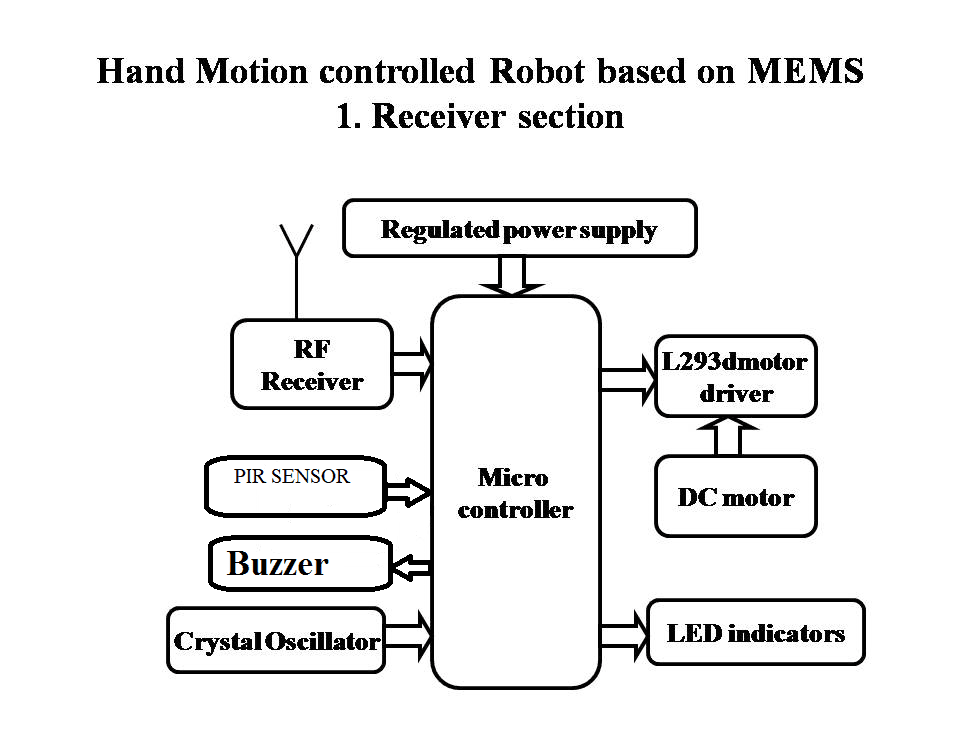
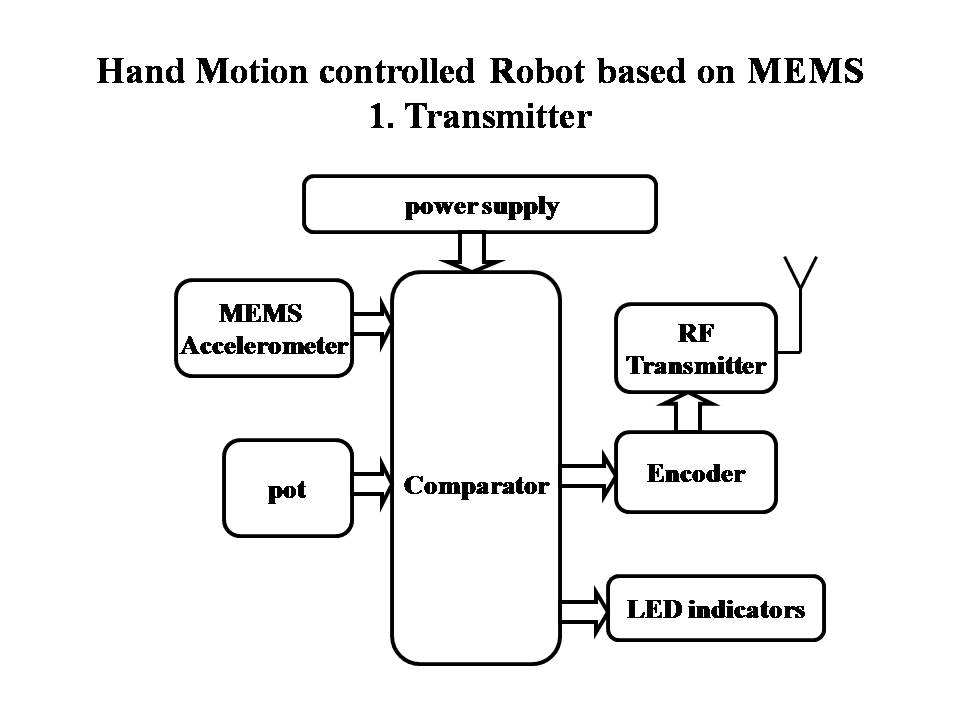
 Block diagram:
Block diagram:
- Wireless controlling of a Robot.
- Controlling the movement of Robot by hand gestures.
- MEMS accelerometer.
- Interfacing Motors with Microcontroller.
- Interfacing MEMS with Microcontroller.
- Embedded C programming.
- RF technology.
- Interfacing of RF transmitter and receiver to Microcontroller.
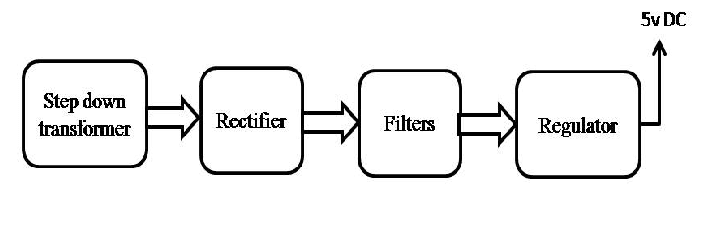
- Regulated Power Supply.
- Microcontroller.
- Comparator.
- MEMS Accelerometer sensor.
- RF transmitter and receiver modules.
- PIR Sensor.
- Buzzer.
- Encoder and Decoder.
- Reset.
- Crystal.
- DC motors with drivers.
- LED indicators.
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
 Block diagram:
Block diagram: