No products in the cart.


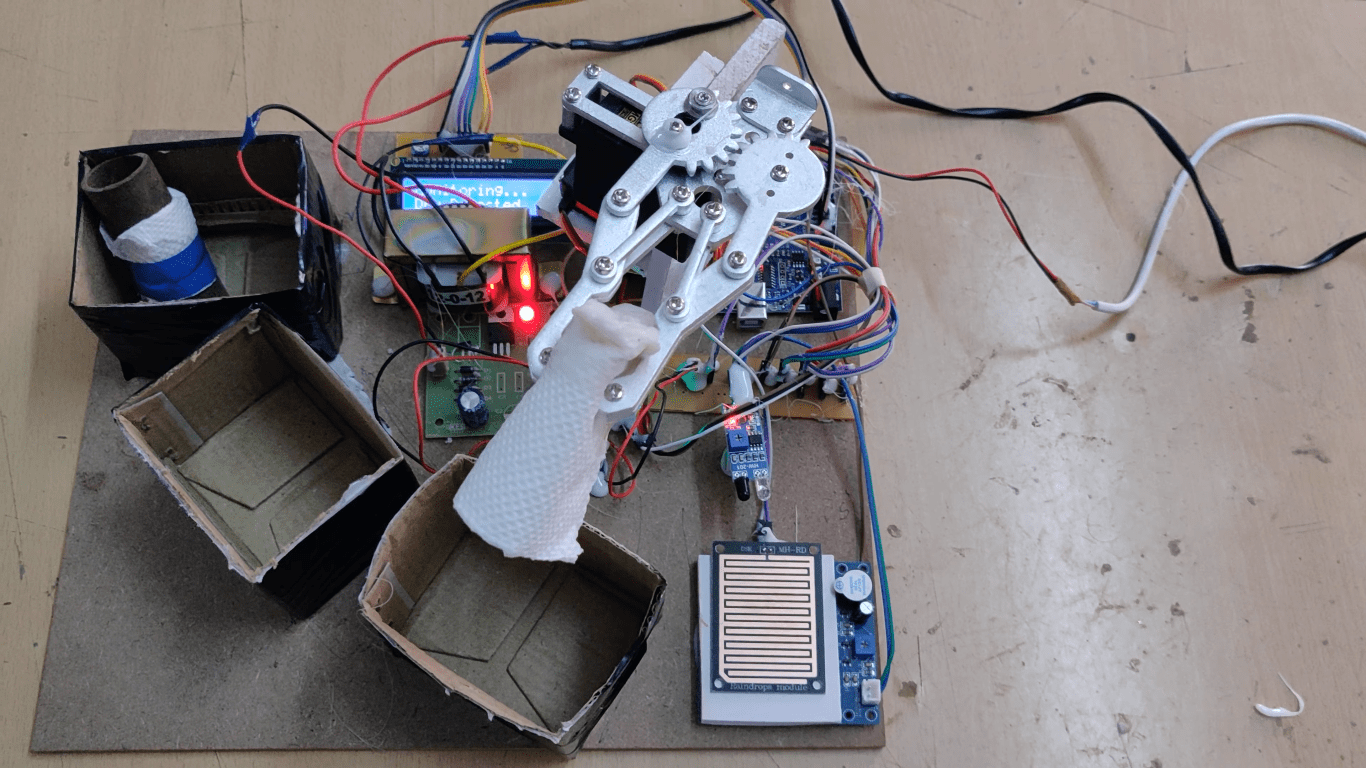
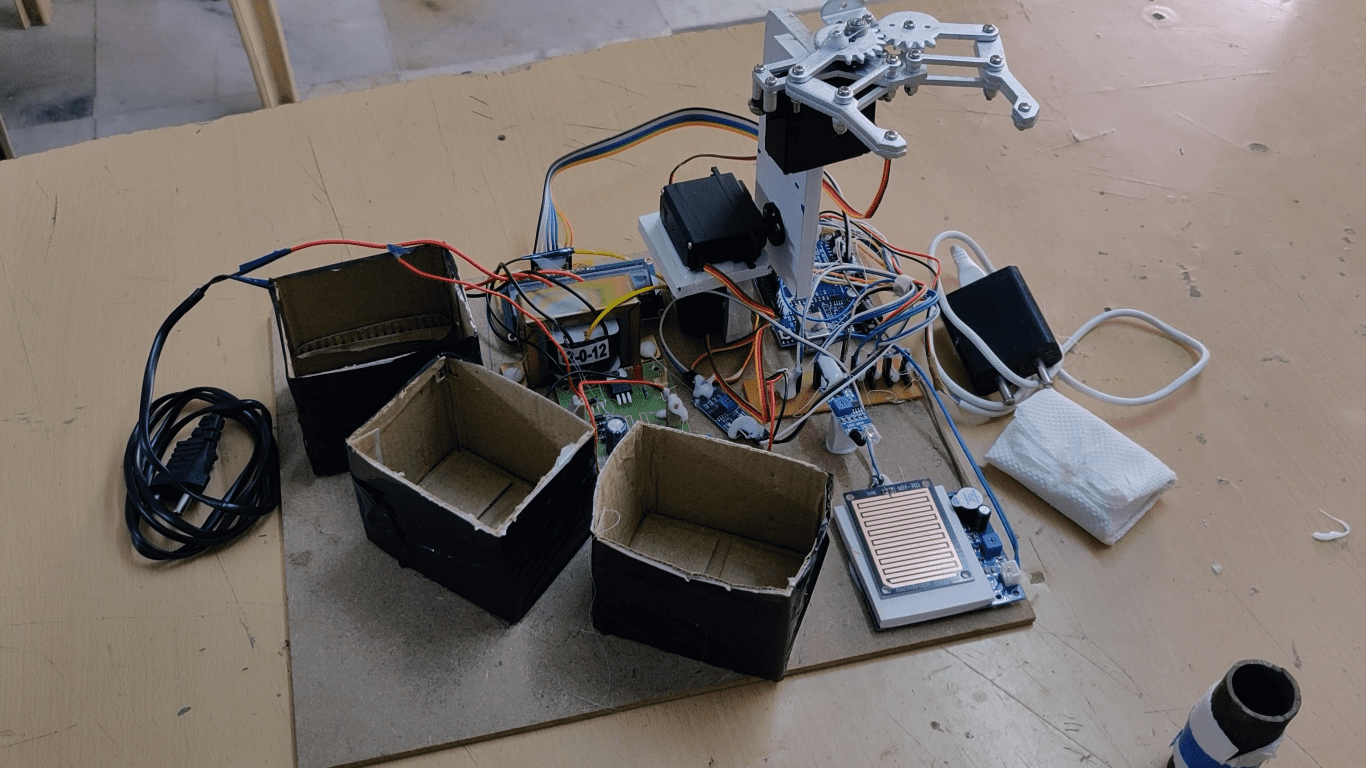
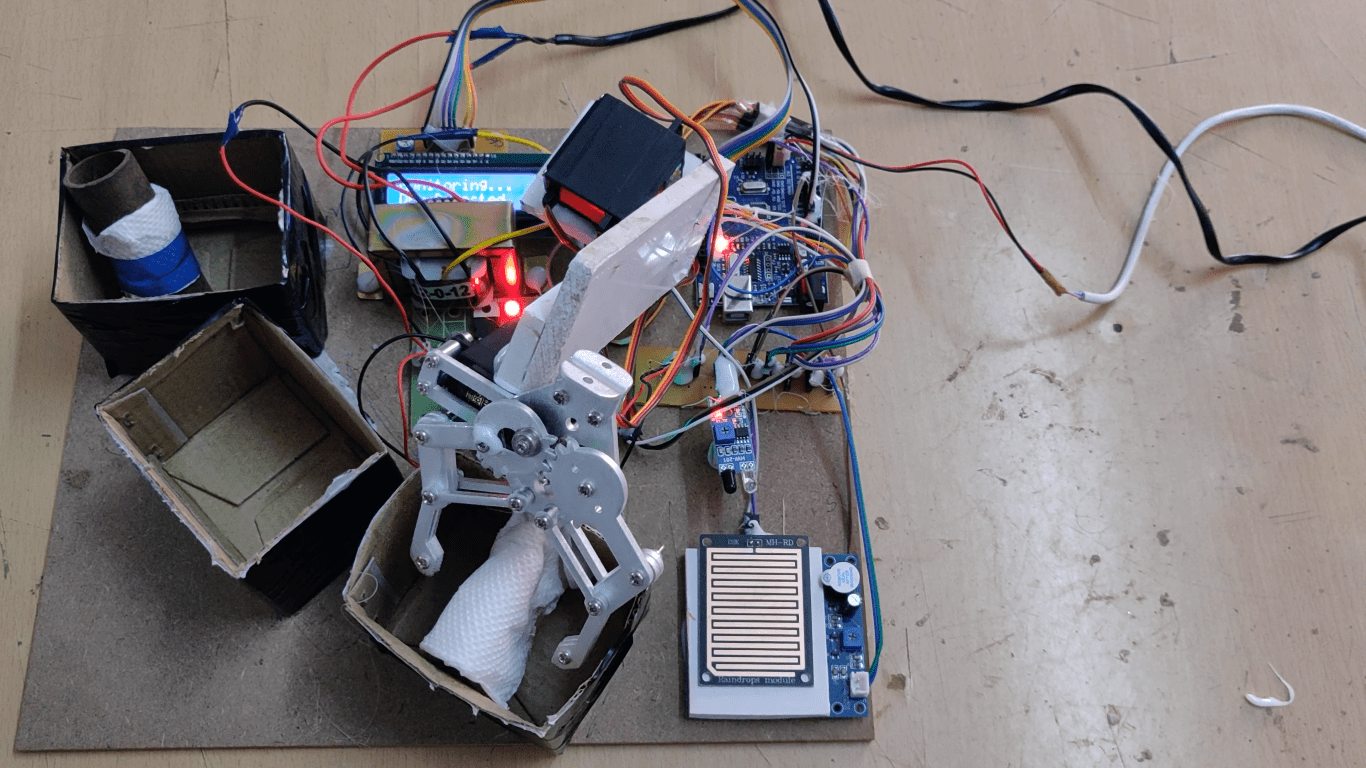
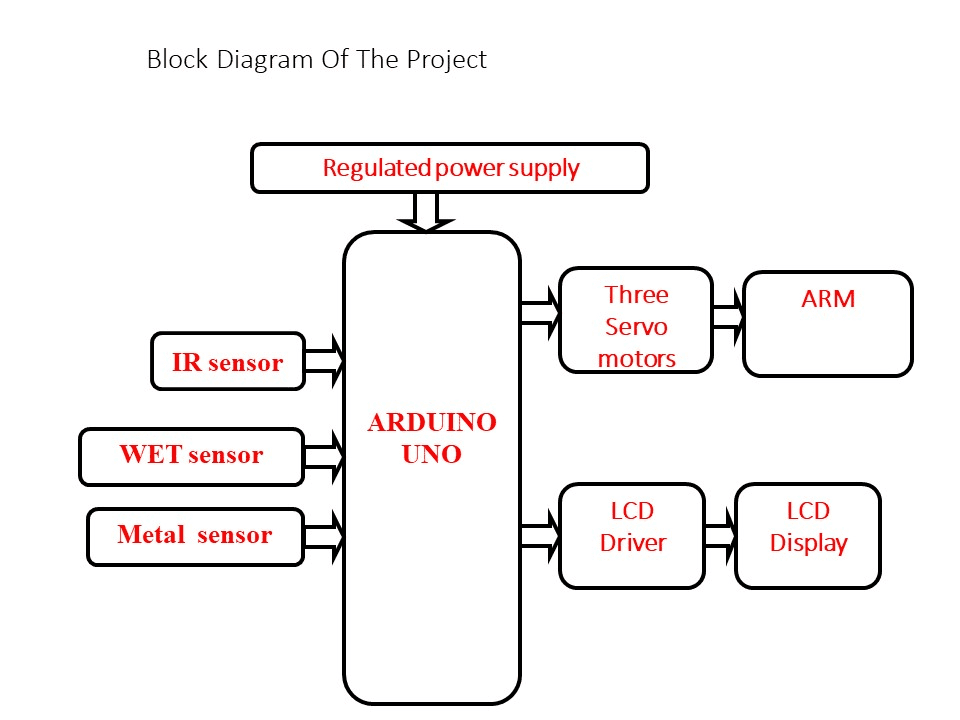
The main aim of the project is designed a trash and recyclable sorting robotic ARM to sort the metallic waste, wet waste and dry waste.
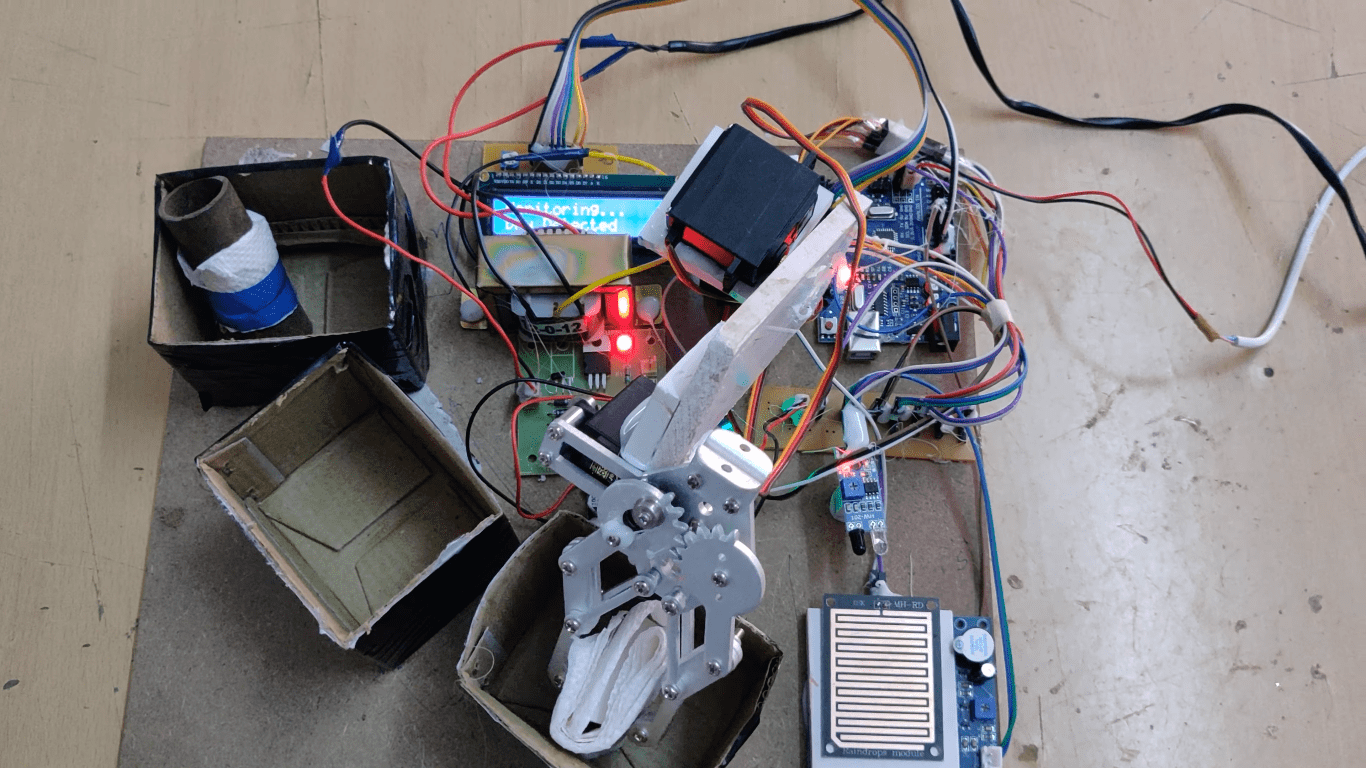
The project makes a use of Arduino microcontroller which is loaded embedded C language.IR sensor is used to detects dry waste, wet sensor is used to detects the wet waste and also metal sensor is used to detects the metallic waste. This sorting arm equipped with three servo motor for gripper open and close, elbow up and down, ARM rotation. Experimental results show that the segregation of waste into metallic, wet and dry waste has been successfully implemented using the AWS. The status of the project will display on LCD.
The major building blocks of this project are:
- Regulated Power Supply.
- Arduino ATMEGA 328 Microcontroller.
- IR Sensor.
- Wet Sensor.
- Metal sensor.
- Servo motors.
- LCD display.
- Gripper.
- Arduino IDE for compiling and dumping code into Microcontroller
- Express SCH for Circuit design.