No products in the cart.


The main aim of this project is to design and fabrication of a delta robot for sorting the colour objects which is placed on the workbench using image processing by using raspberry pi and pi camera.
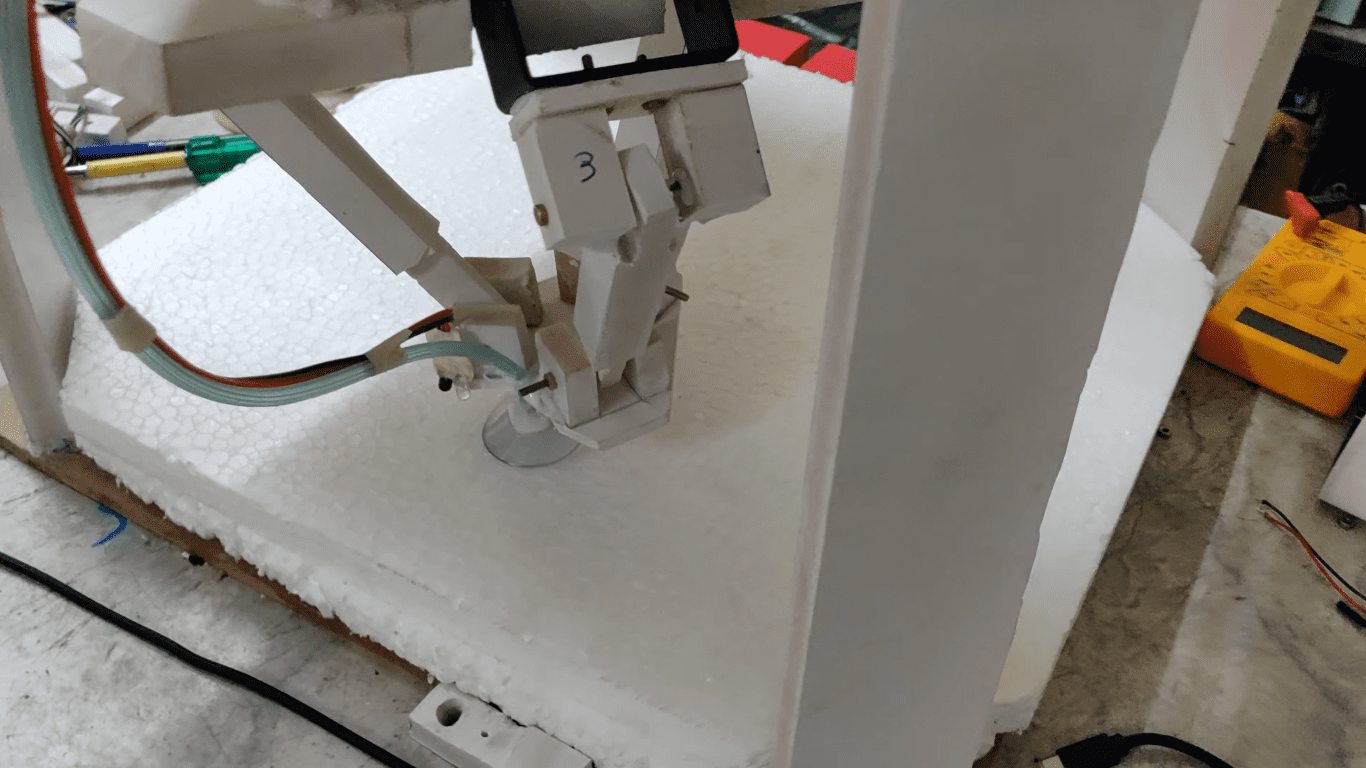
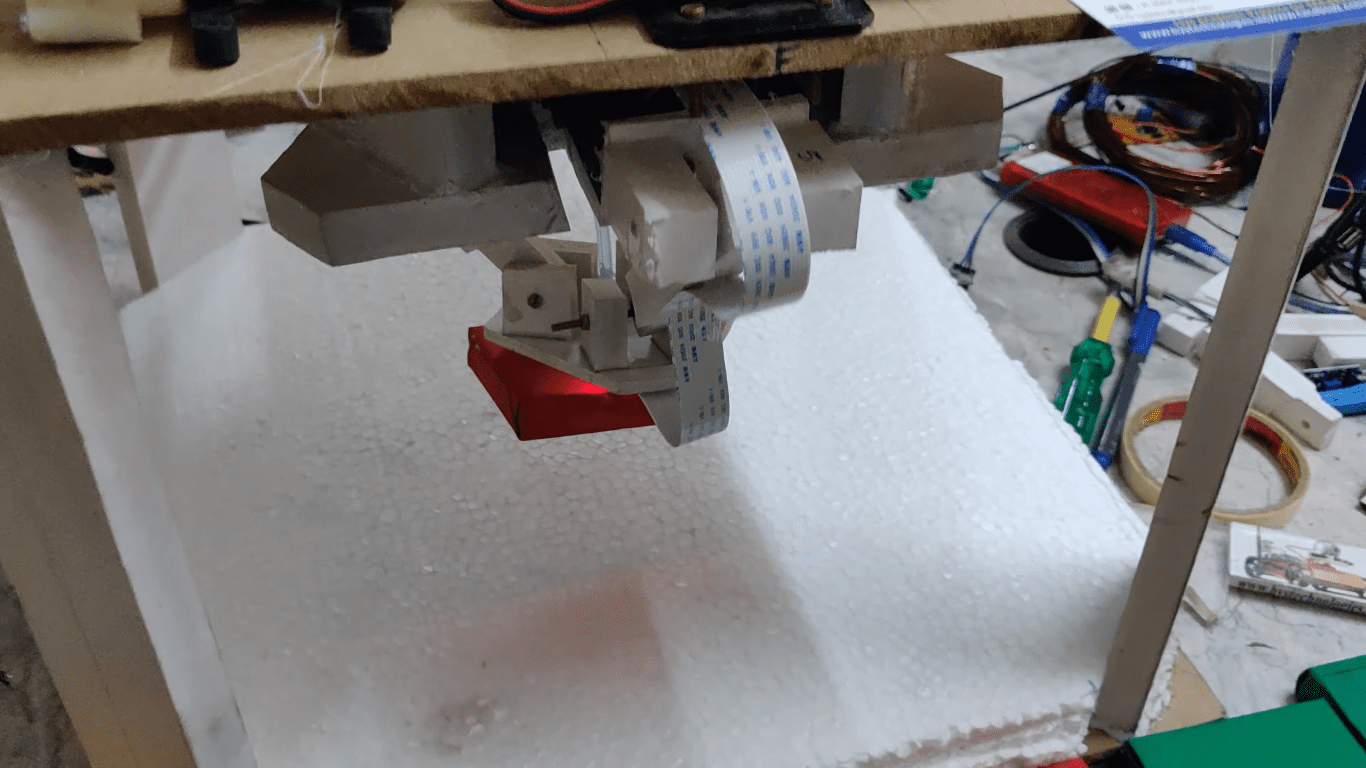
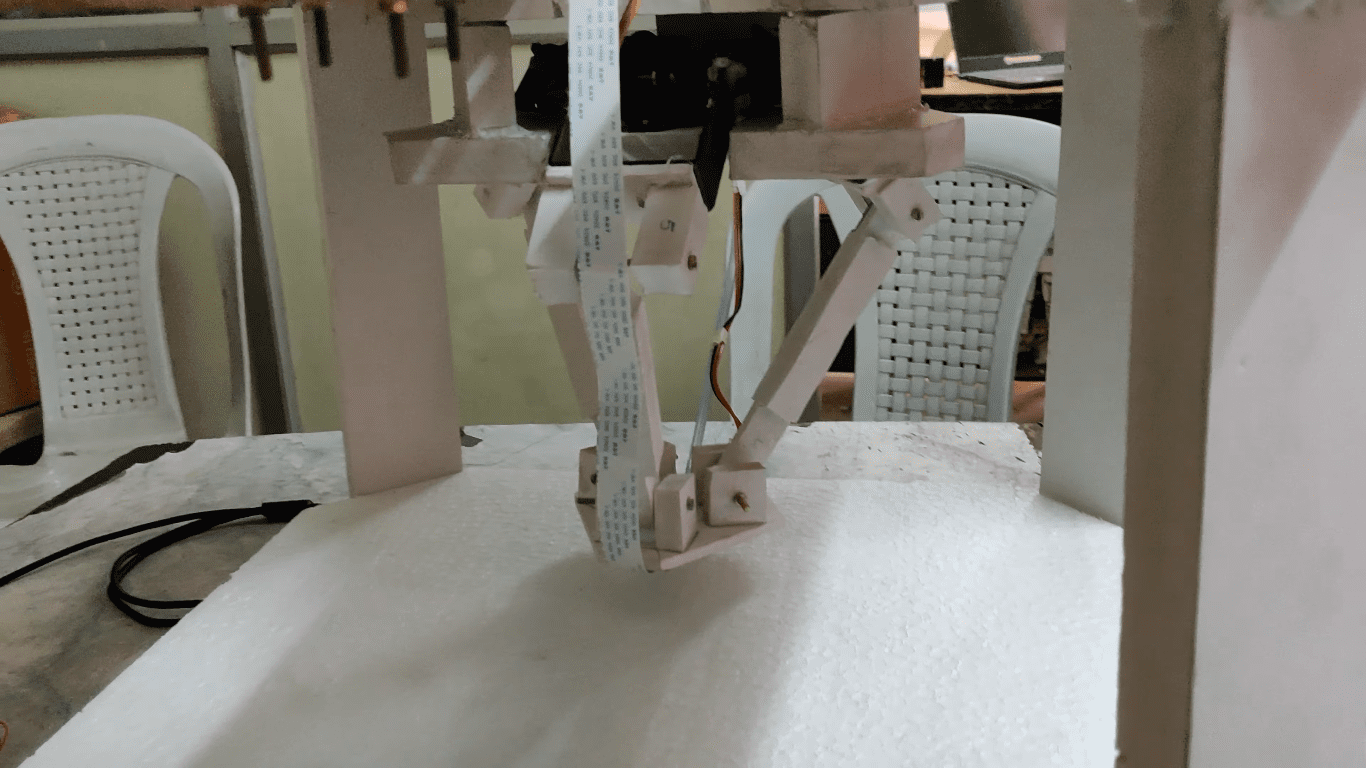
This robot consists of three servo motors which are placed at the joints of each link which tend to move gripper on front, back, right and left directions. The can be picked up and placed object where required to place. Three servo motors are used in the robot; among the three motors each distal joint has one motor. These distal joints are connected with the parallelogram joints and in turn three parallelogram joints are connected with three distal joints. Thus the three parallelogram joint are connected with the lower base plate of the robot. Then the servo controlled suction mechanism called servo gripper is fixed with the lower base plate. This gripper is used for the pick and place operations.
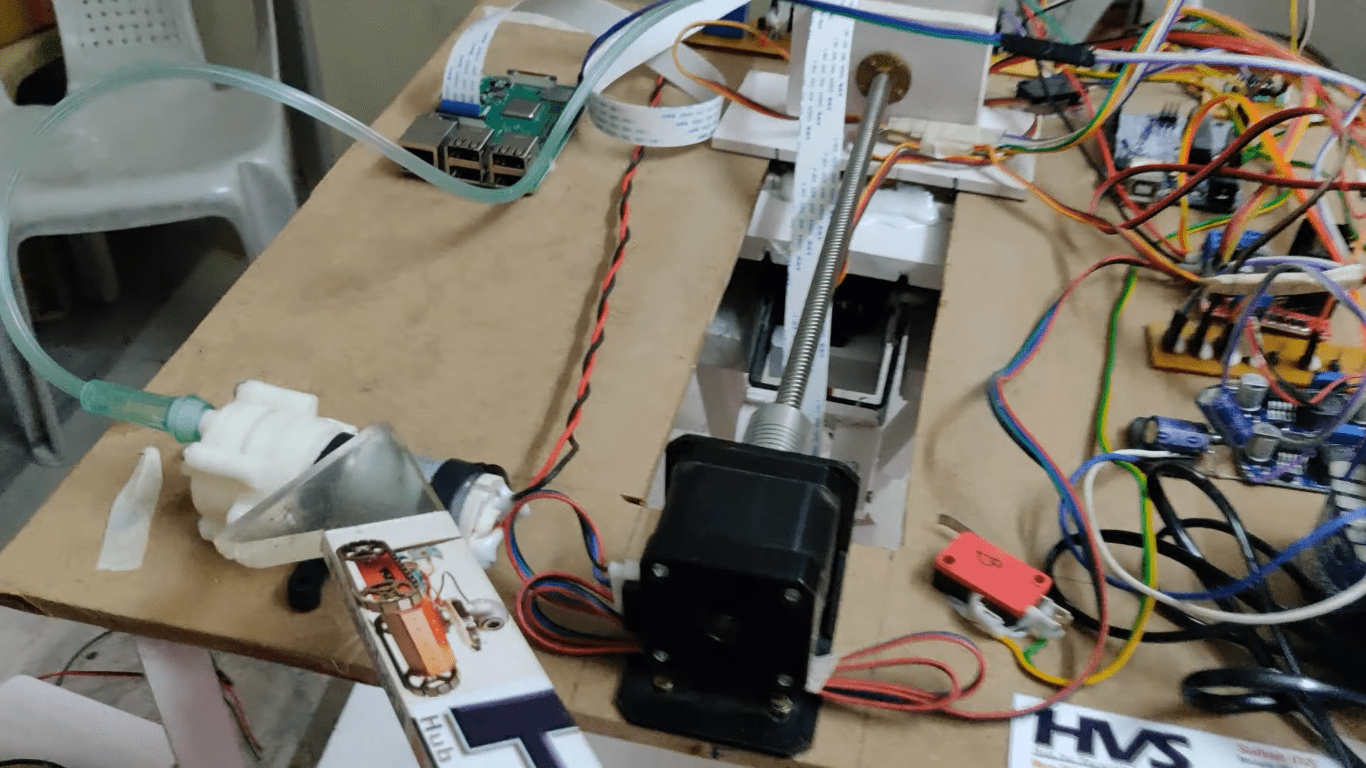
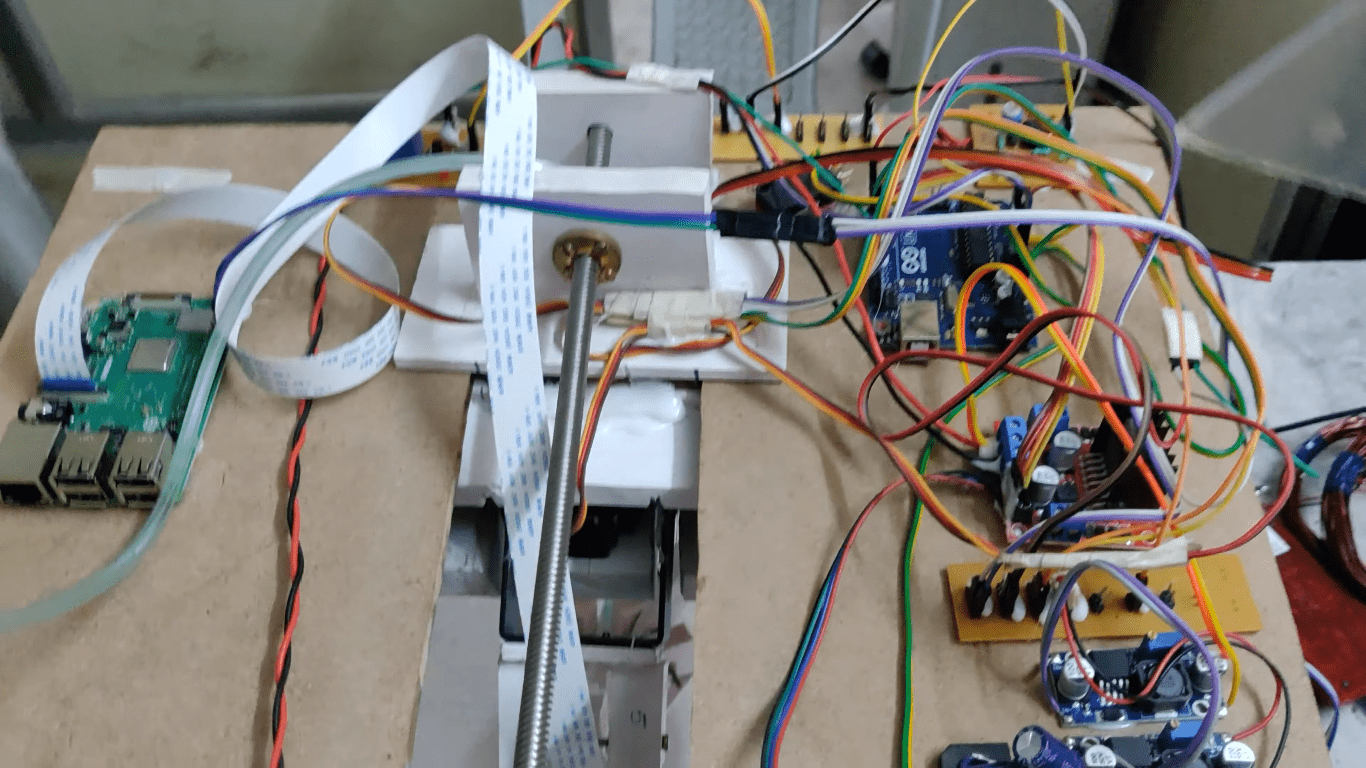
This project makes use of an onboard computer, which is commonly termed as Raspberry Pi3 processor. It acts as heart of the project. The color detection is done by pi camera which uses machine vision techniques. Image processing has led to advancements in applications of robotics and embedded systems. Here, we sort the object based on color. For the color detection the video of the respective object is captured by the pi camera. The video stream is the converted into image format then RGB value is converted in to the HSV value. The control then represents the grey color. The brightness or the intensity of the color is determined. The range of the color is defined and corresponding mask is created.
The delta robot servo motors are programmed using the arduino microcontroller and they integrated using the servo motor driver circuit. Each servo motor is given with some pulses to make the joints actuation and based on the input pulse given to the servo motor the joints will actuate. The microcontroller has been programmed in such a way that the joint should not collide with each other. The stepper motor is uses to front and back motion of the delta robot. IR sensor is uses to detect the object at workbench.
Objective:
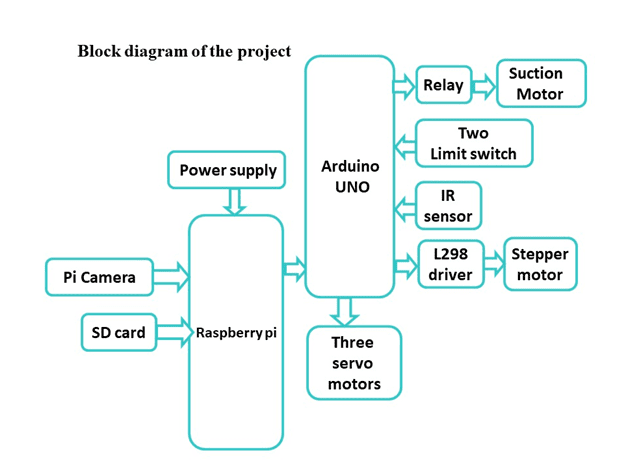
 Block diagram:
video:
Block diagram:
video:
- Design a delta robot to sorting the color objects.
- Raspberry pi and Pi camera-based COLOR detection system.
- Using Image processing technology to identify the color.
- Using servo motor to design a delta robot.
- To achieve this task using ARDUINO UNO and Raspberry pi
- Raspberry pi.
- Pi camera.
- Three Servo motors.
- Stepper Motor with l298 driver.
- SD card.
- Arduino UNO.
- IR sensor.
- LCD display.
- Arduino IDE for Embedded C programming.
- Python programming.
- Linux OS.
- Express SCH for Circuit design
 Block diagram:
Block diagram:
 video:
video:







