No products in the cart.



Emergency scenarios may necessitate autonomous vehicle maneuvers up to their handling limits in order to avoid collisions. In these scenarios, vehicle stabilization becomes important to ensure that the vehicle does not lose control. However, stabilization actions may conflict with those necessary for collision avoidance, potentially leading to a collision.
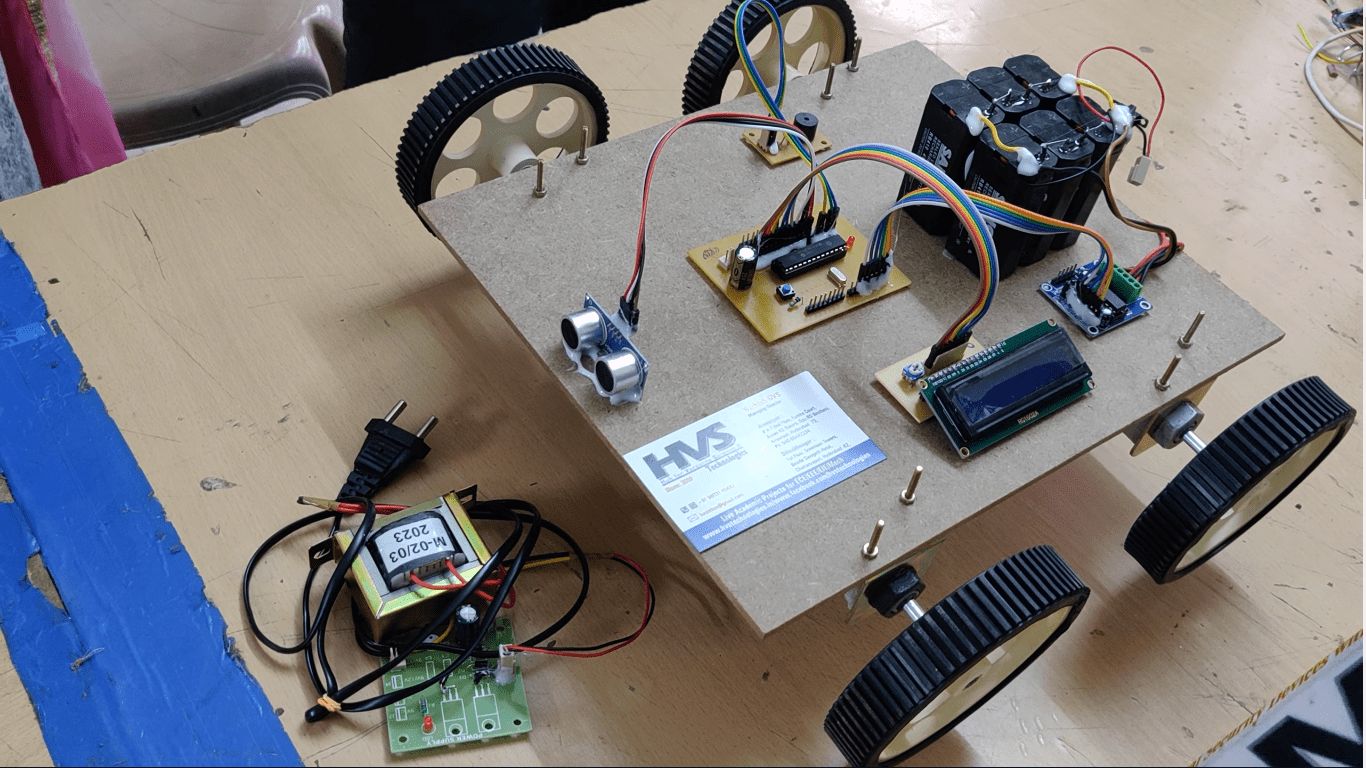
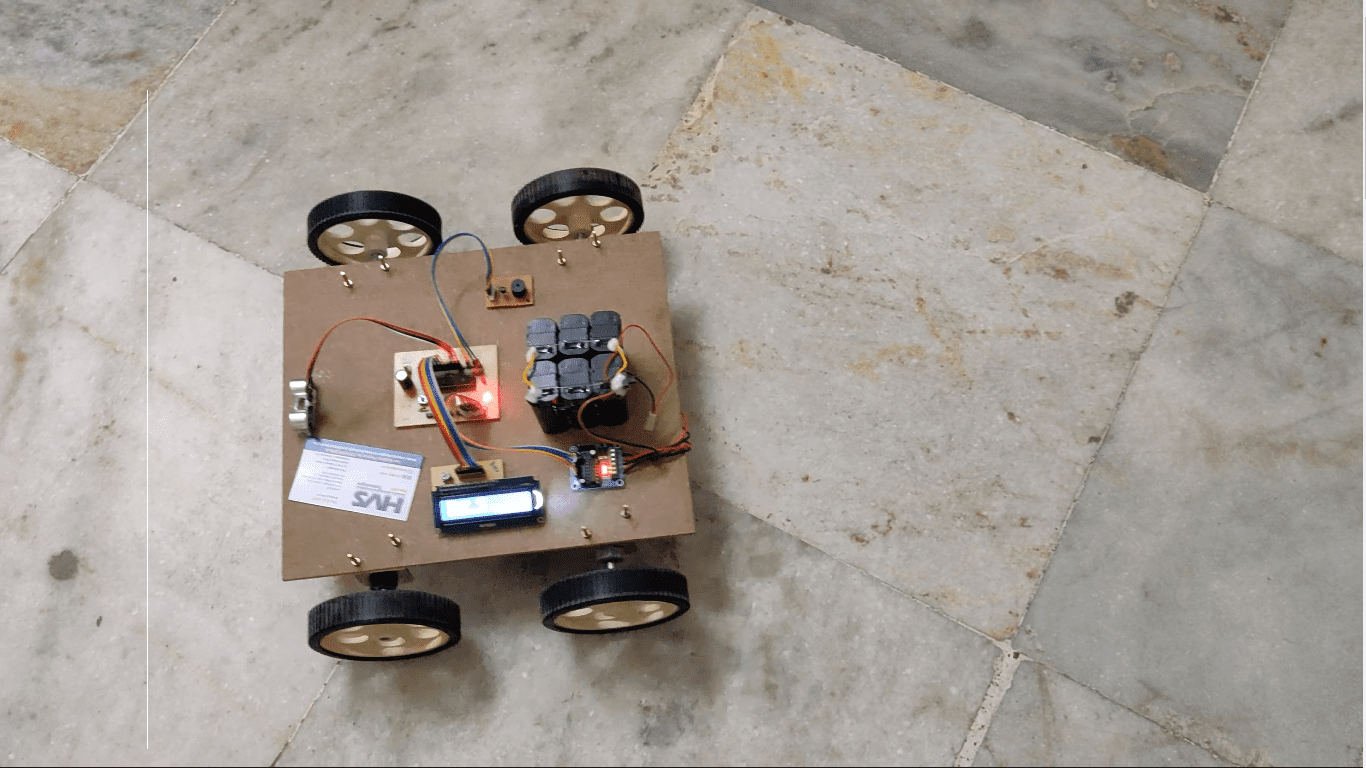
The project aims in designing a robotic vehicle which is capable of monitoring the distance from vehicle to another vehicle, automatic changing the direction when the opposite vehicle arrives less than 1-feet and automatic vehicle speed control When the opposing vehicle approaches to this vehicle. All this collision systems can be works based on ultrasonic sensor and the status of the project will display on LCD module. Security is the bigger concern for an individual or a firm. Recognizing the need of security of the vehicles we developed an automatic collision detection, avoidance and stabilization system.
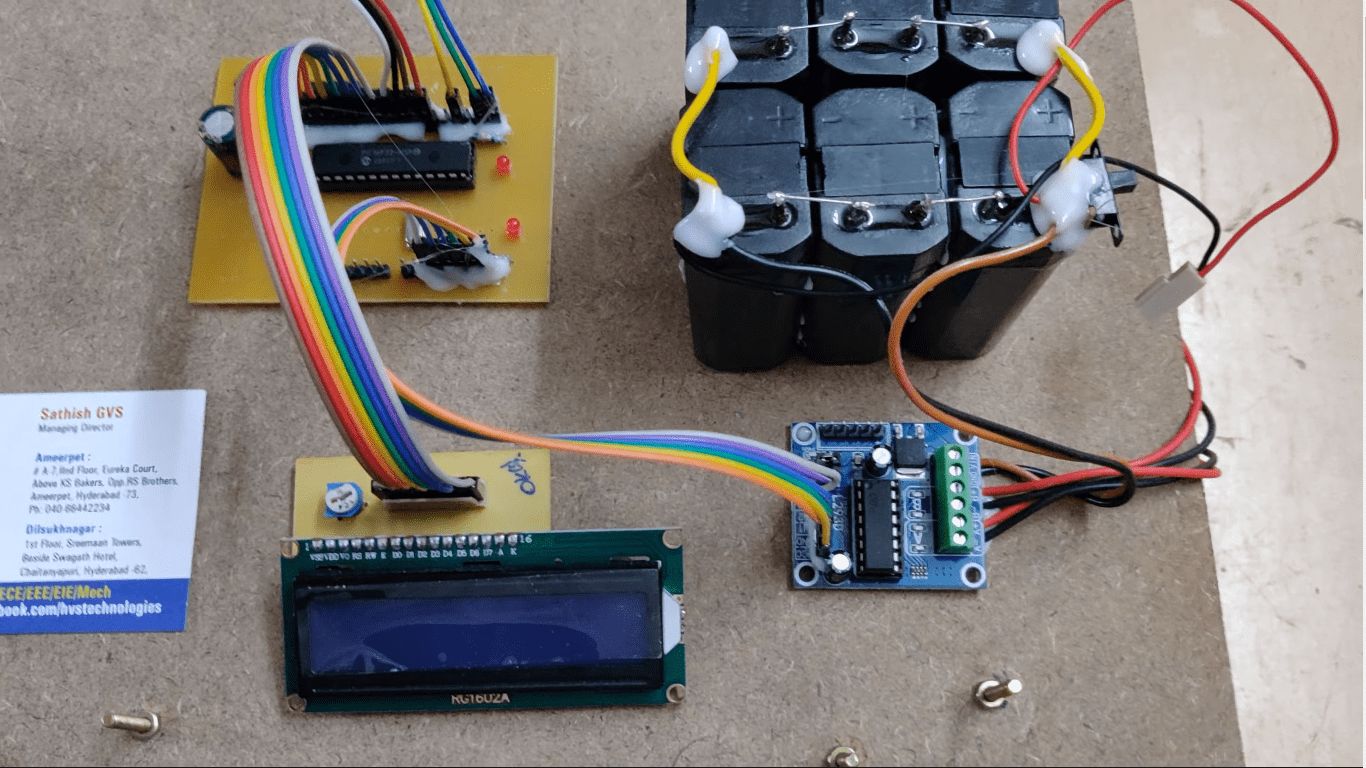
The modules in the project are: ultrasonic range finder sensor which is capable of detecting the distance and speed, DC motors for robot movement, LCD for display the status.
Ultrasonic range finder sensor has transmitter and receiver. Micro controller will generate the 40 KHz transmission signal. The receiver will receive the signal which is reflected from the surface of the object. The return signal is amplified. The microcontroller is then used to calculate the time of flight (TOF) for the sound wave that is bounced off of distant objects. Using this device, we can measure the distance of 10cm to 400cm.
The project makes use of a microcontroller, which acts as a central controlling unit. This module is capable of communicating with the input and the output modules. The vehicle or car is equipped with an ultrasonic sensor at front side of the vehicle. Whenever the car enters a parking location, the Ultrasonic sensor at the back side of the vehicle gives the distance range of the opposite vehicle and displays it on LCD. The action of these Instructions is loaded into the Microcontroller using Embedded C programming.
Features:
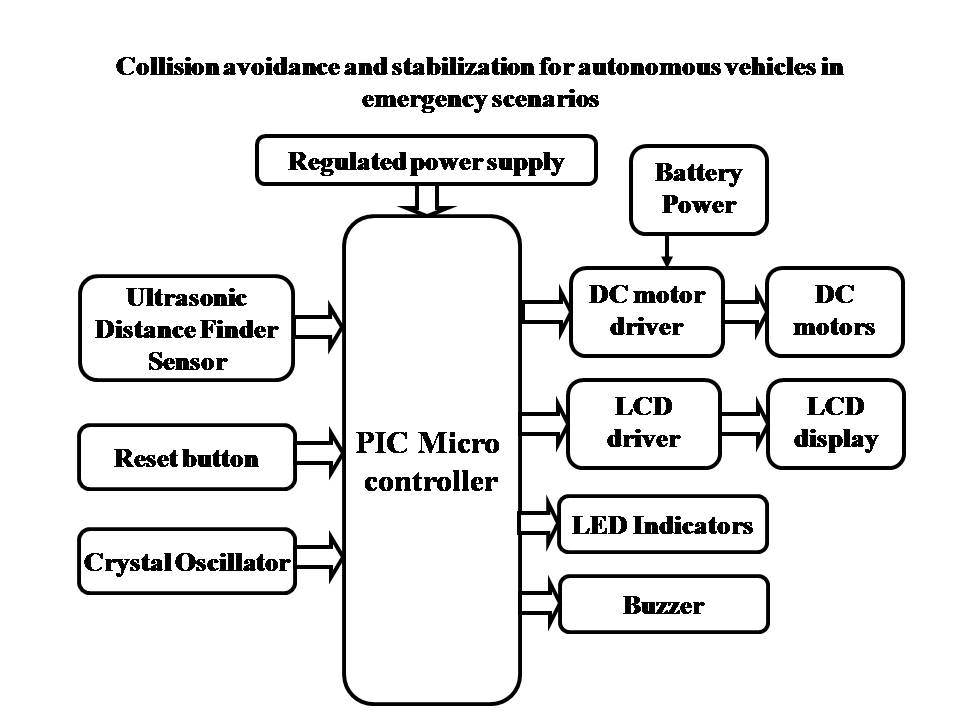
 Block diagram:
video:
Block diagram:
video:
- Automatic vehicle speed control system.
- Automatic vehicle direction changing system.
- Automatic distance measuring and displaying the distance status, speed on (Ultrasonic distance sensor).
- Ultrasonic technology.
- Interfacing the Ultrasonic sensor module with microcontroller.
- DC motors working and need for motor driver.
- Interfacing LCD to Microcontroller.
- Embedded C programming.
- PCB Design concepts.
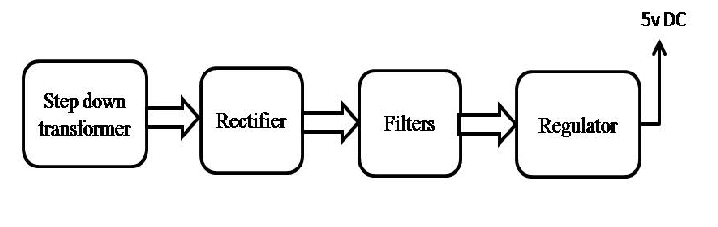
- Battery power supply.
- Regulated Power Supply.
- PIC Microcontroller.
- Ultrasonic sensor.
- DC motors with driver.
- LCD display.
- Buzzer.
- Reset.
- Crystal oscillator.
- LED indicators.
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
 Block diagram:
Block diagram:
 video:
video:







