No products in the cart.


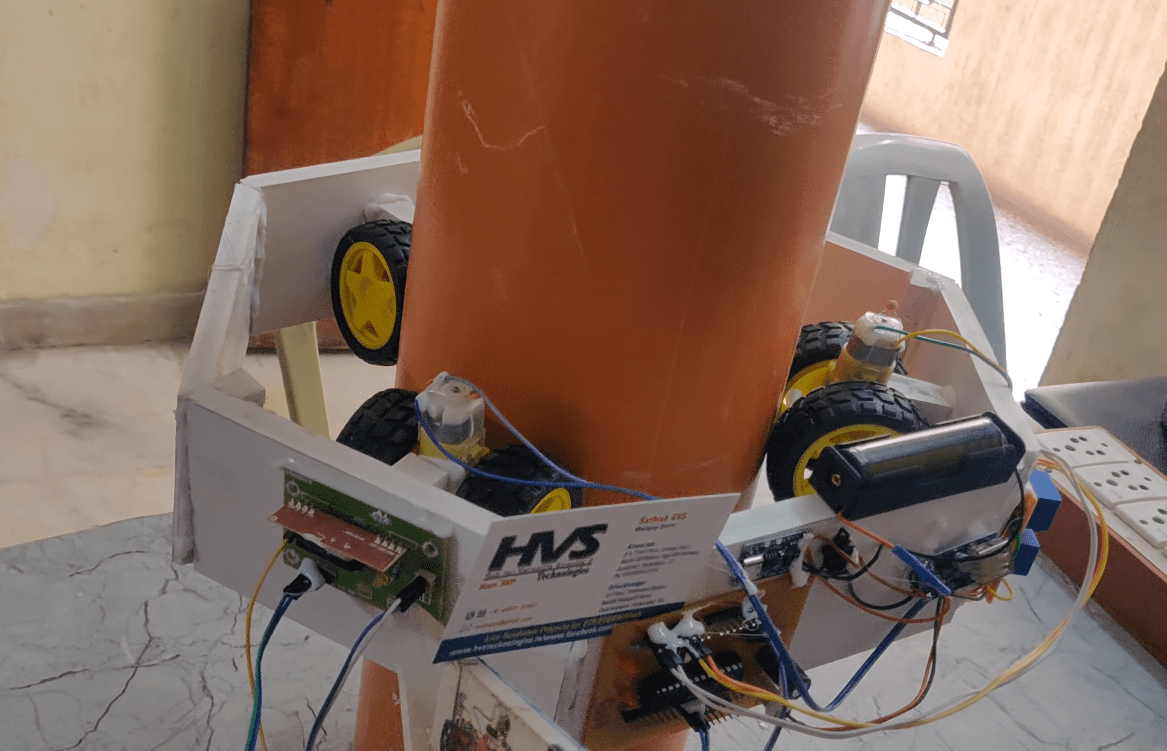

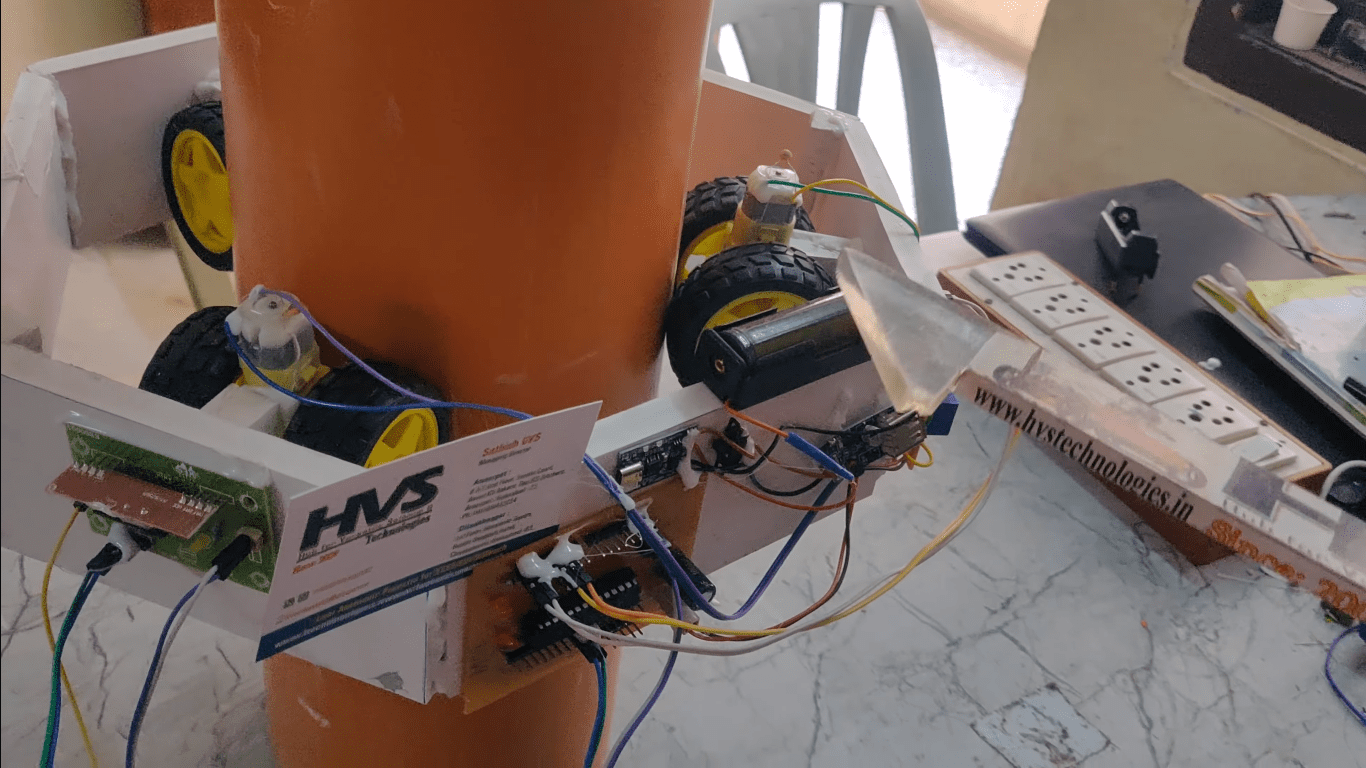
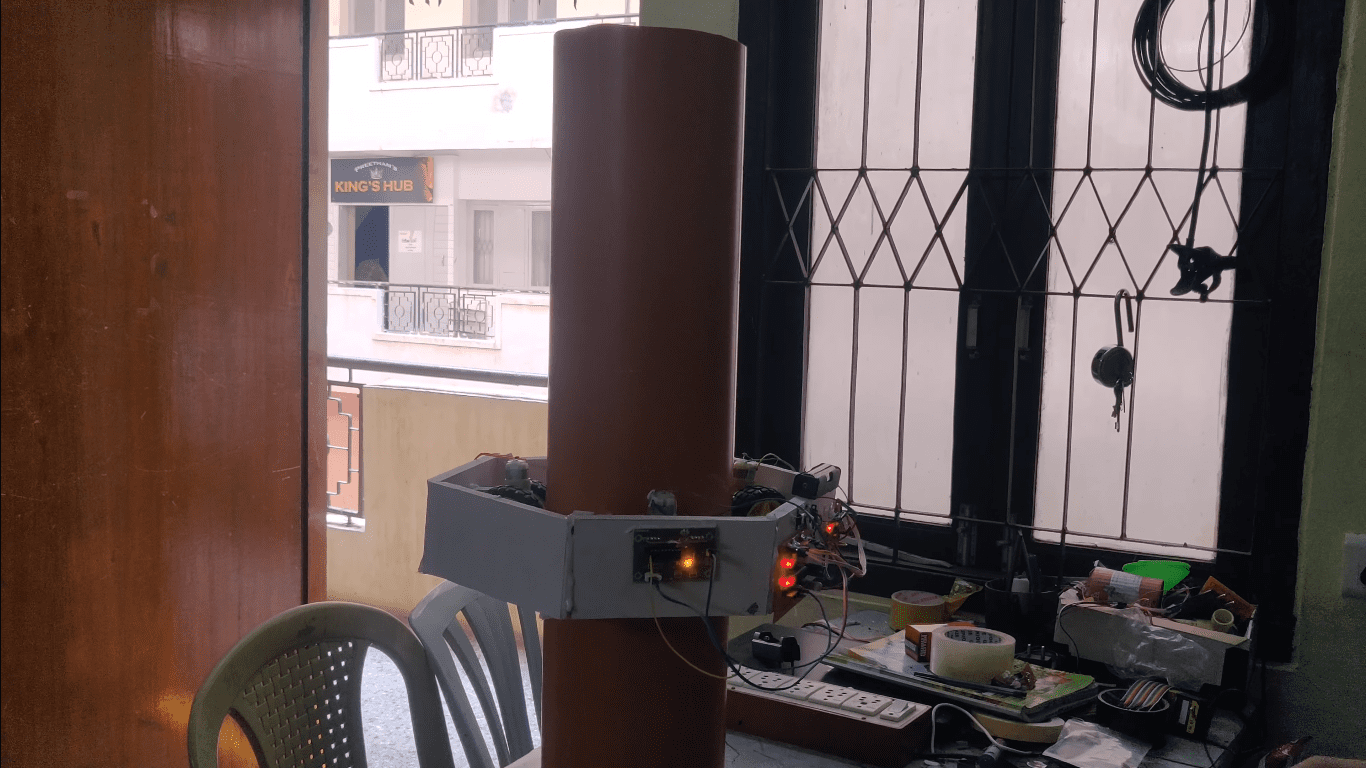
The main aim of the project is to design climbing robot to climb the electrical pole for giving tools to the electric man. Robot can be controlled by the RF Communication. This project is mainly used to give the required tool for electrical line man.
The principle theory which is used in the pole climbing robot is elaborated the control system of pole climbing robot is designed. Analysis shows that the mechanism has the characteristics of compact body,easy control,good move characteristics,and is a promising application of pole climbing robot structure. Our prototype of pole climbing robot has the capability to climb over the poles and perform the desired task smoothly. we need to design a wireless circuit which helps robot climb on the pole, can be controlled using wireless technology like RF Technology.
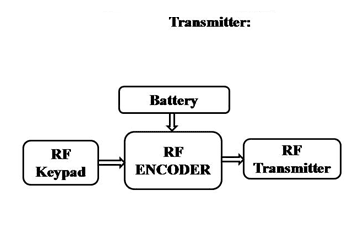
In this project we are using a new gripping mechanism for climbing the pole for that we are using two power supplies one lead acid battery and another from ac power. The H-bridge is used to control the direction of the motors used for climbing purpose. Two switching arrays are used for controlling the robot The RF modules uses Transmitter, Receiver, RF Encoder and RF Decoder. The two switches are interfaced to the RF transmitter through RF Encoder. The encoder continuously reads the status of the switches, passes the data to the RF transmitter and the transmitter transmits the data.
Main features present in this project:
 Block Diagram:
video:
[/iframe
Block Diagram:
video:
[/iframe
- It performs the task smoothly.
- Easy control, good move characteristics.
- Capability to climb over the poles.
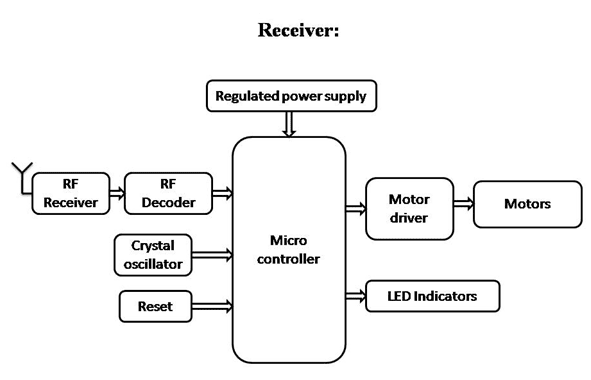
- Micro controller.
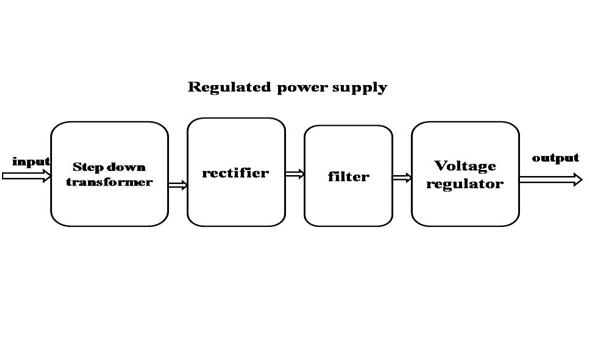
- Regulated power supply.
- RF Transmitter.
- RF Receiver.
- Motor driver
- DC Motors
- Crystal oscillator
- Reset
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
- Proteus for hardware simulation.
 Block Diagram:
Block Diagram:
 video:
[/iframe
video:
[/iframe 






