Subtotal ₹4,000.00


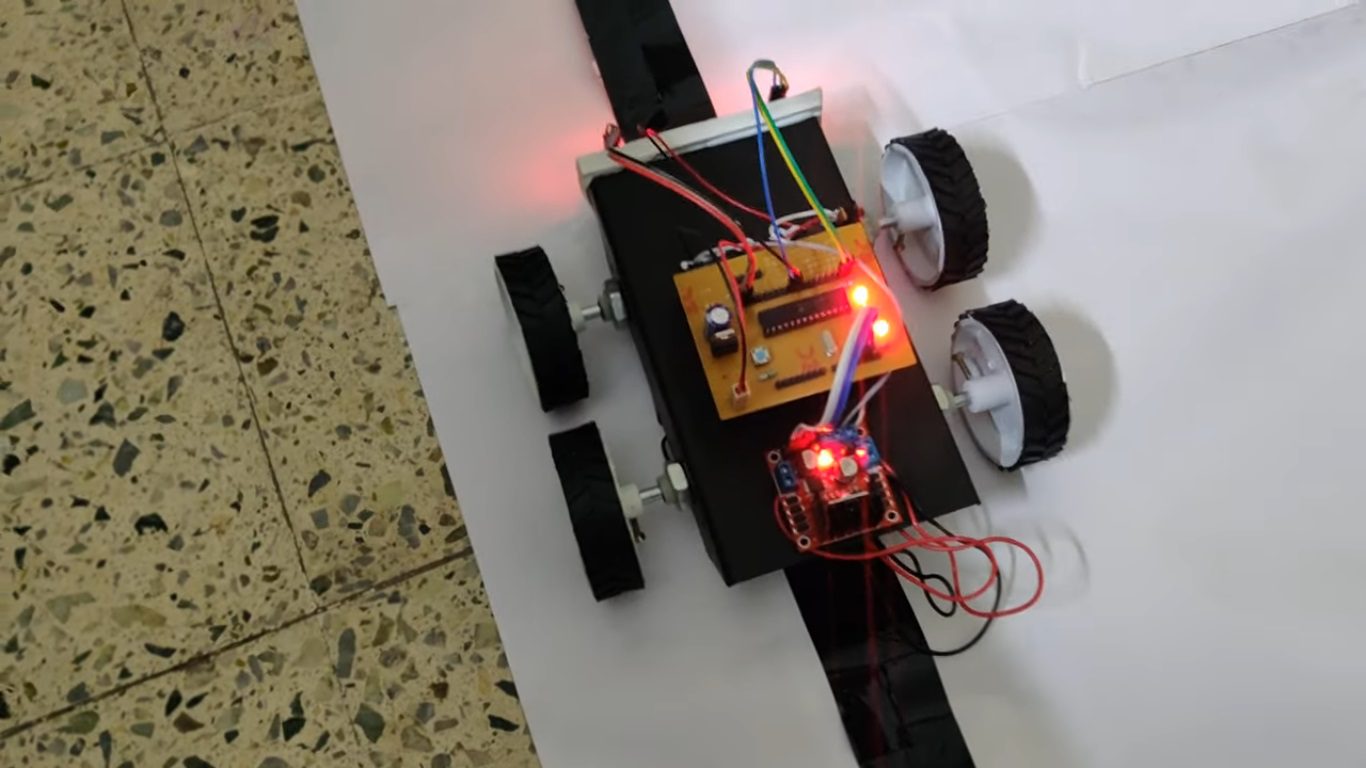

The main aim of this Project is to design a robot which is capable of following line using line detection sensors. This simple robot is designed to be able to follow a black line on the ground without getting off the line too much. The robot has two sensors installed underneath the front part of the body, and two DC motors drive wheels moving forward. A circuit inside takes input signal from IR sensors and controls the speed of wheels’ rotation. The control is done in such a way that when a sensor senses a black line, the motor slows down or even stops. Then the difference of rotation speed makes it possible to make turns.
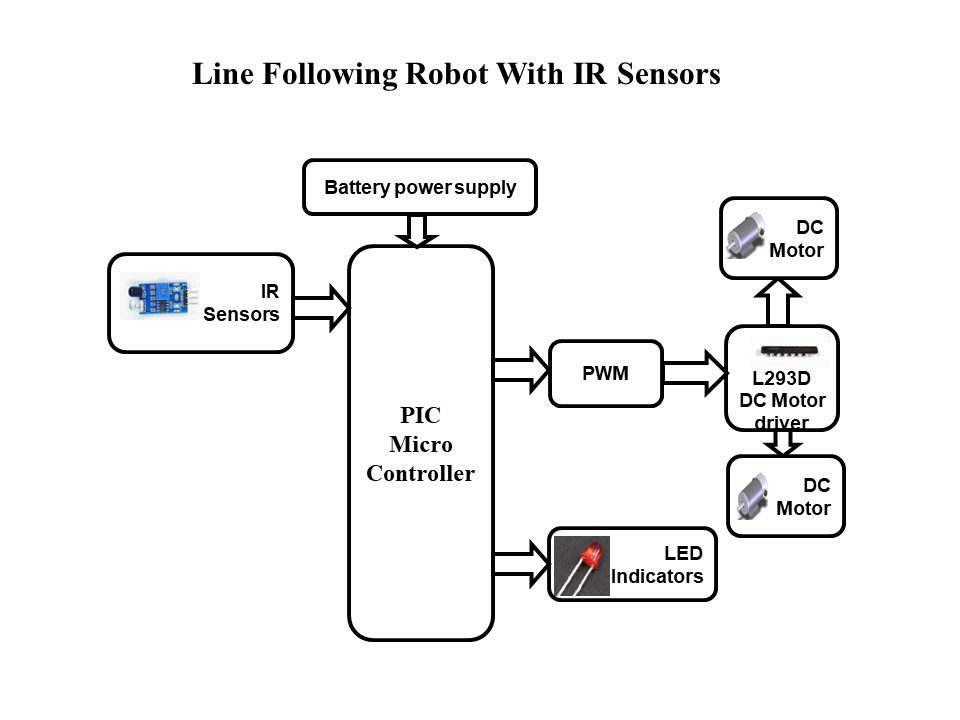
The robot uses IR sensors to sense the line; an array of 2 IR LEDs (Tx) and sensors (Rx), facing the ground has been used in this setup. The output of the sensors is a digital signal which depends on the amount of light reflected back, this signal is given to the PIC Microcontroller.
Line follower is a machine that can follow a path. The path can be visible like a black line on a white surface (or vice-versa) or it can be invisible like a magnetic field. Sensing a line and maneuvering the robot to stay on course, while constantly correcting wrong moves using feedback mechanism forms a simple yet effective closed loop system. Practical applications of a line follower: Automated cars running on roads with embedded magnets; guidance system for industrial robots moving on shop floor etc.
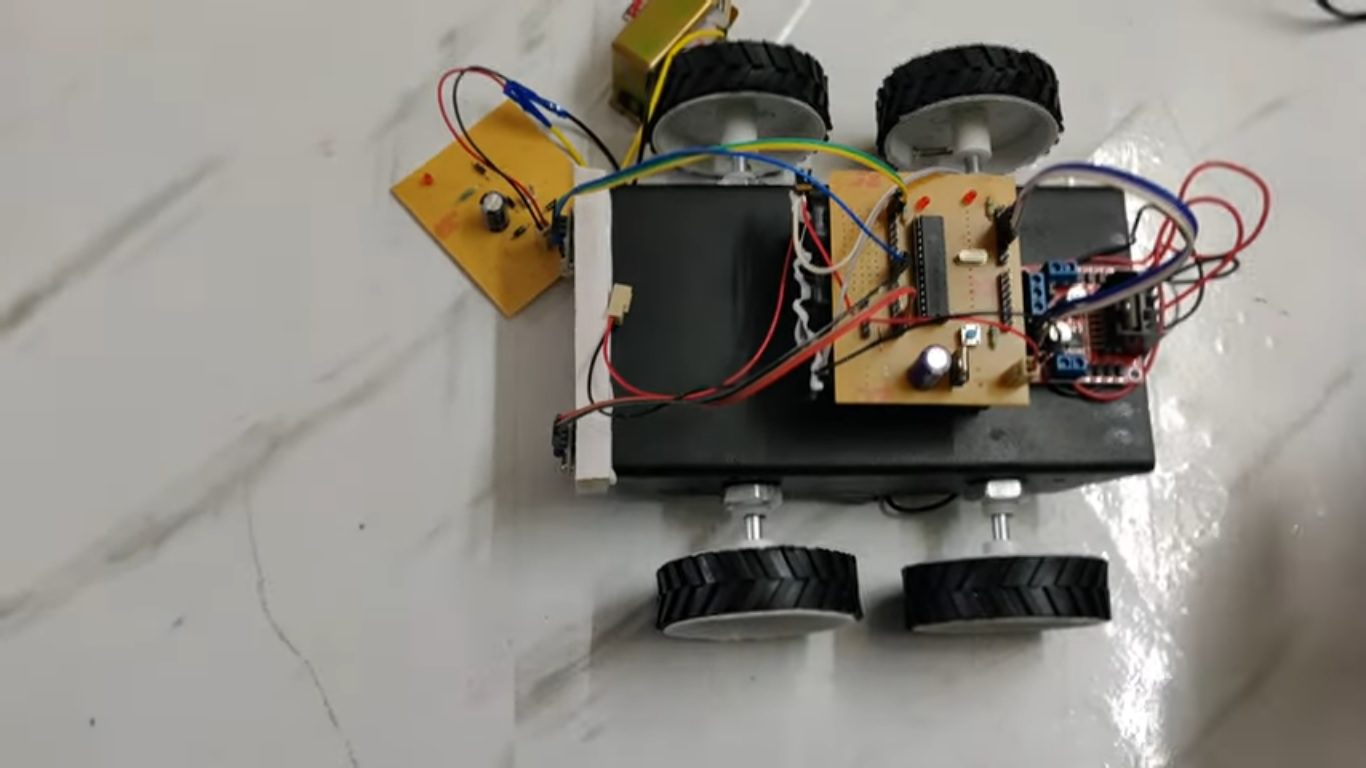
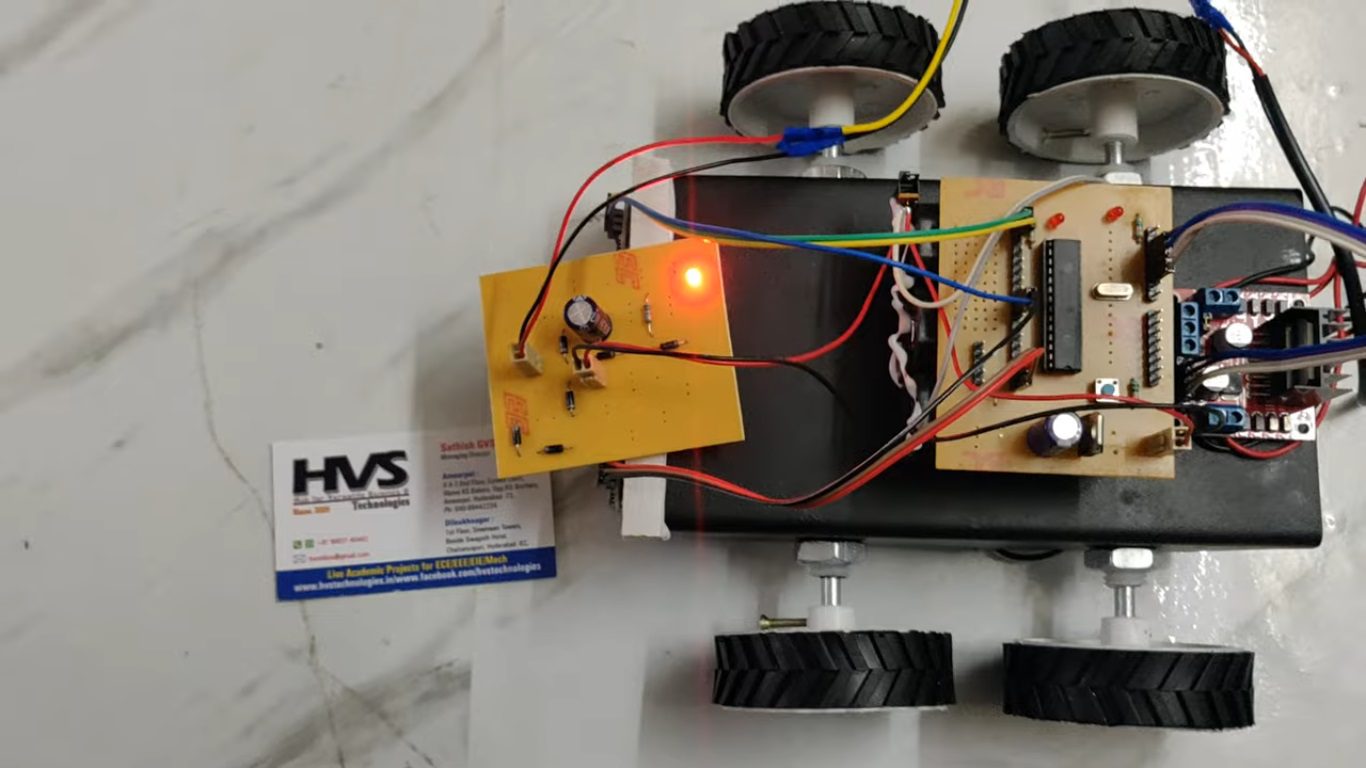
The controlling device of the whole unit is PIC Microcontroller to which input and output modules are interfaced. The Microcontroller is programmed in Embedded C language which intelligently performs the specific task. Here, the Microcontroller gets input from the line sensor attached to the robot. This input is processed by controller and acts appropriately on the motors of the Robot.
Features of the project:
 video:
video:
- Design a battery-operated line following robot.
- IR sensors-based line detection and controlling.
- To achieve this task using PIC microcontroller.
- Battery power.
- PIC Microcontroller.
- IR sensors.
- DC motors with L293D motor driver.
- Robot chases.
- PIC C Compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
 video:
video:







