No products in the cart.



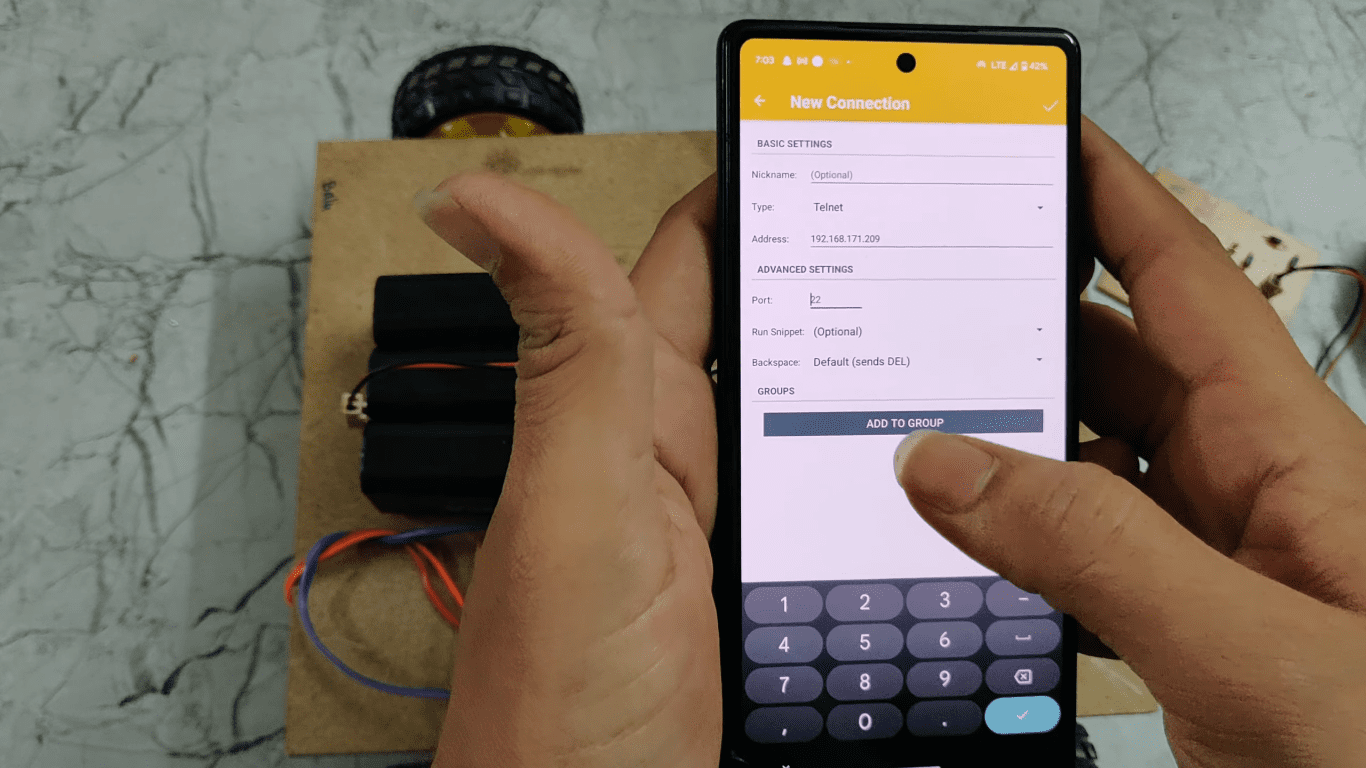
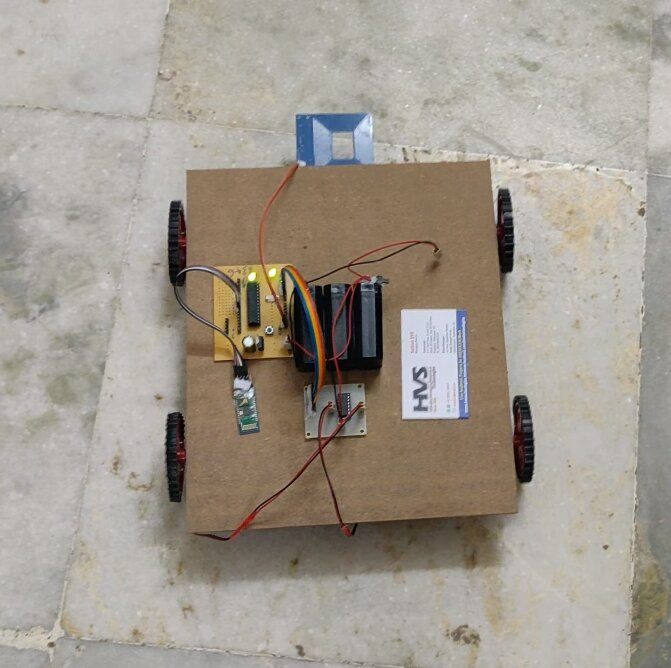
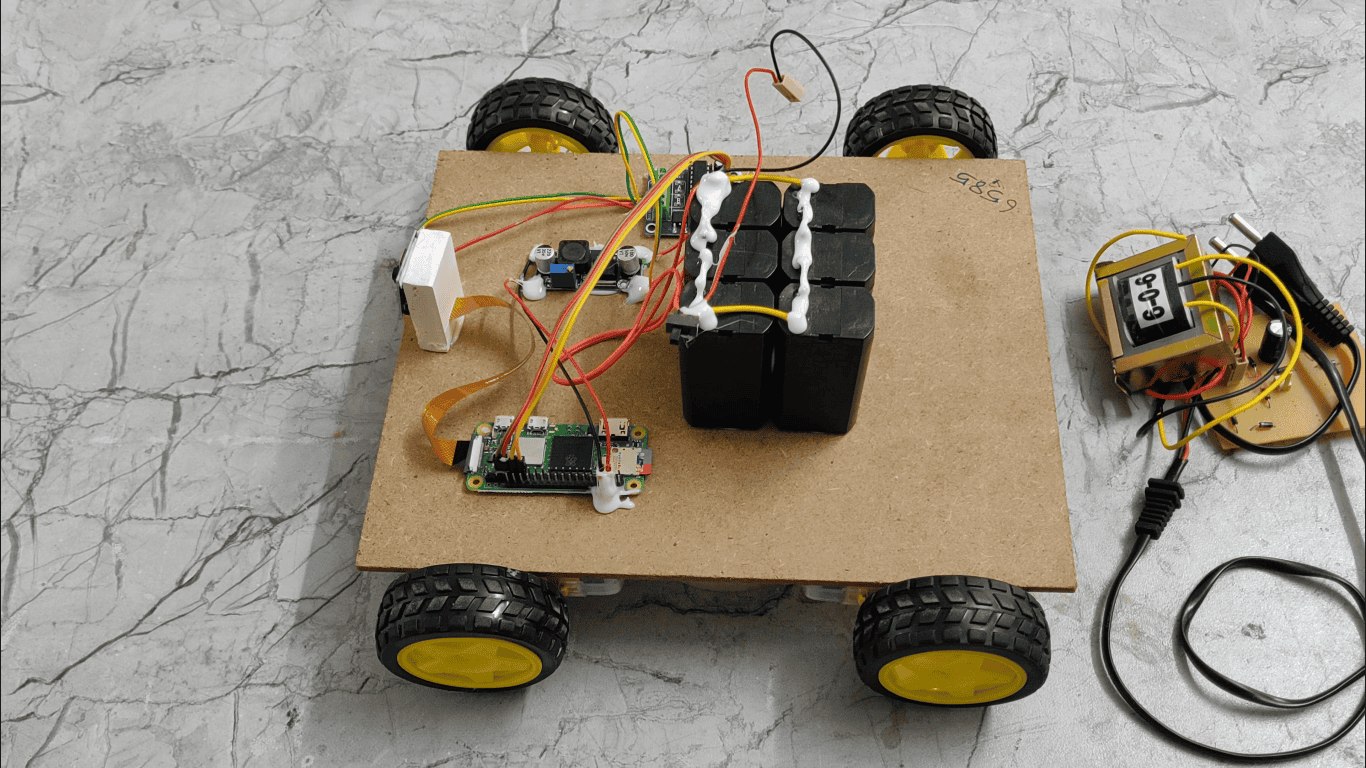
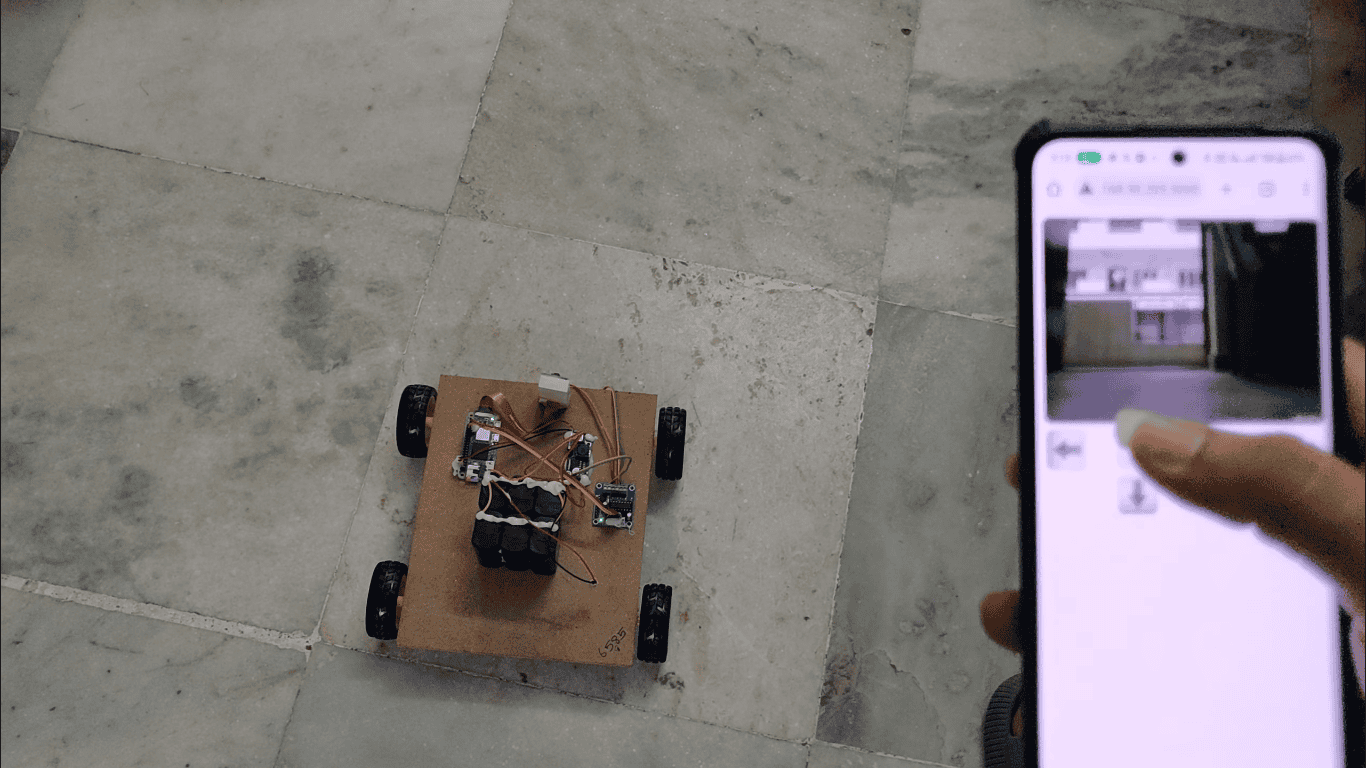
The purpose of this project is to build A WI-FI controlled robot is controlled by using smart phone.
We can control the robot using smart phone through iot required task like moving forward, reverse, turning left, turning right and stop.
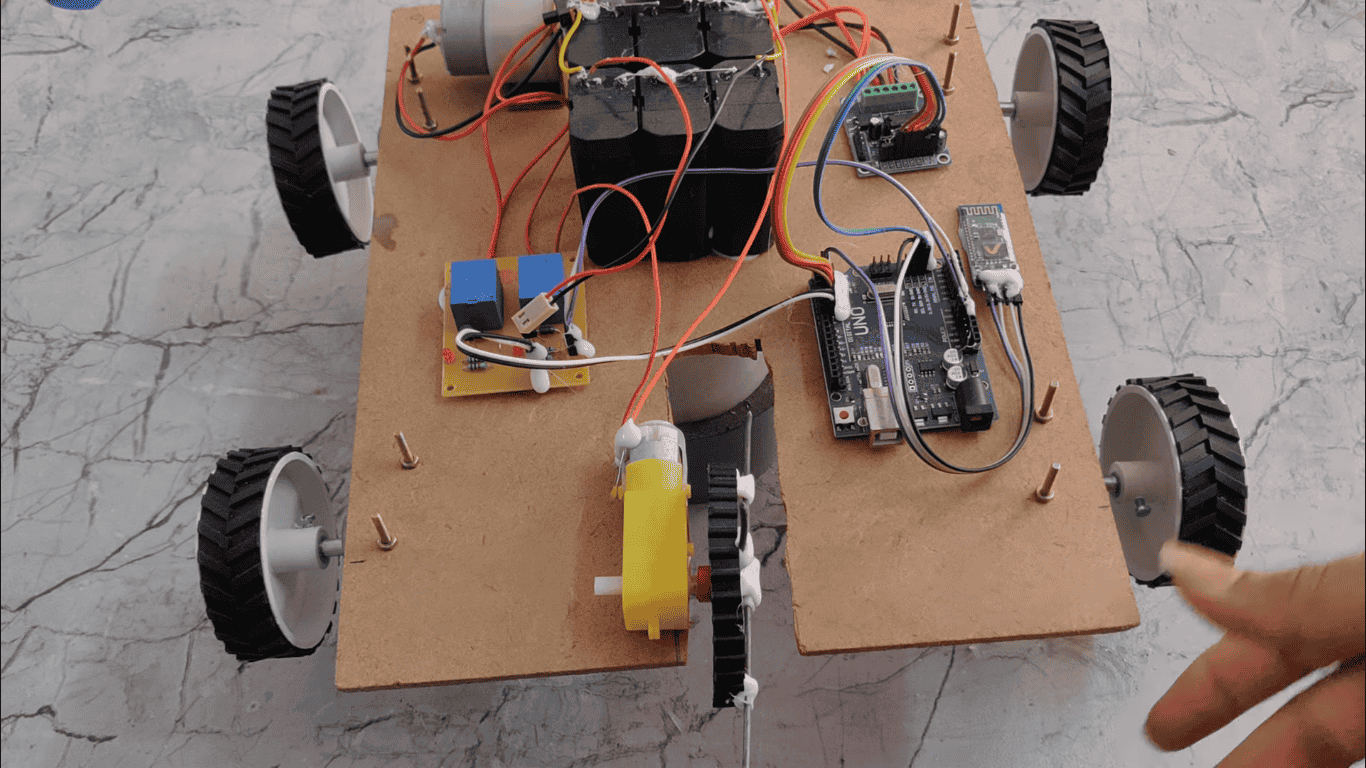
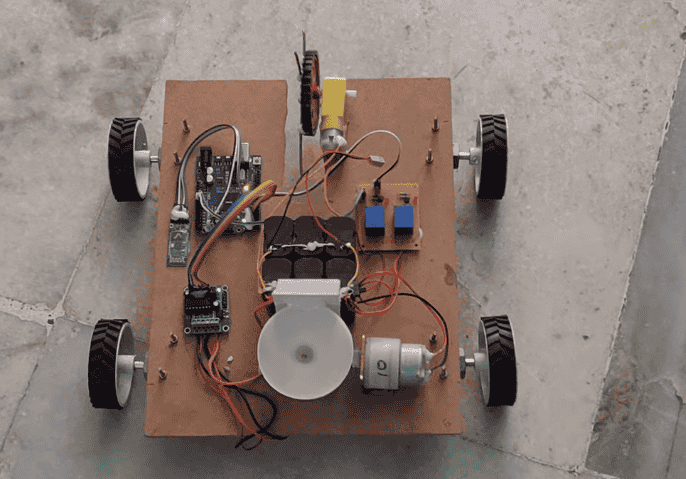
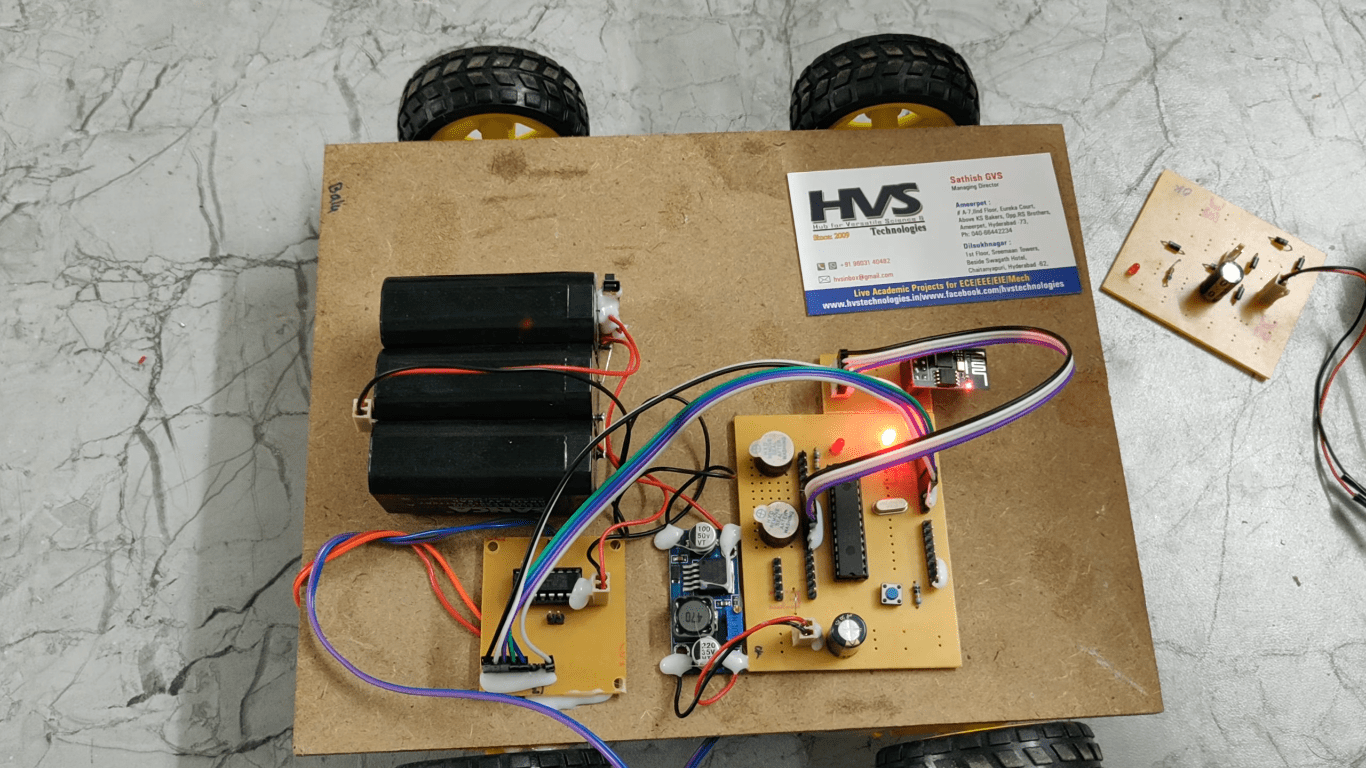
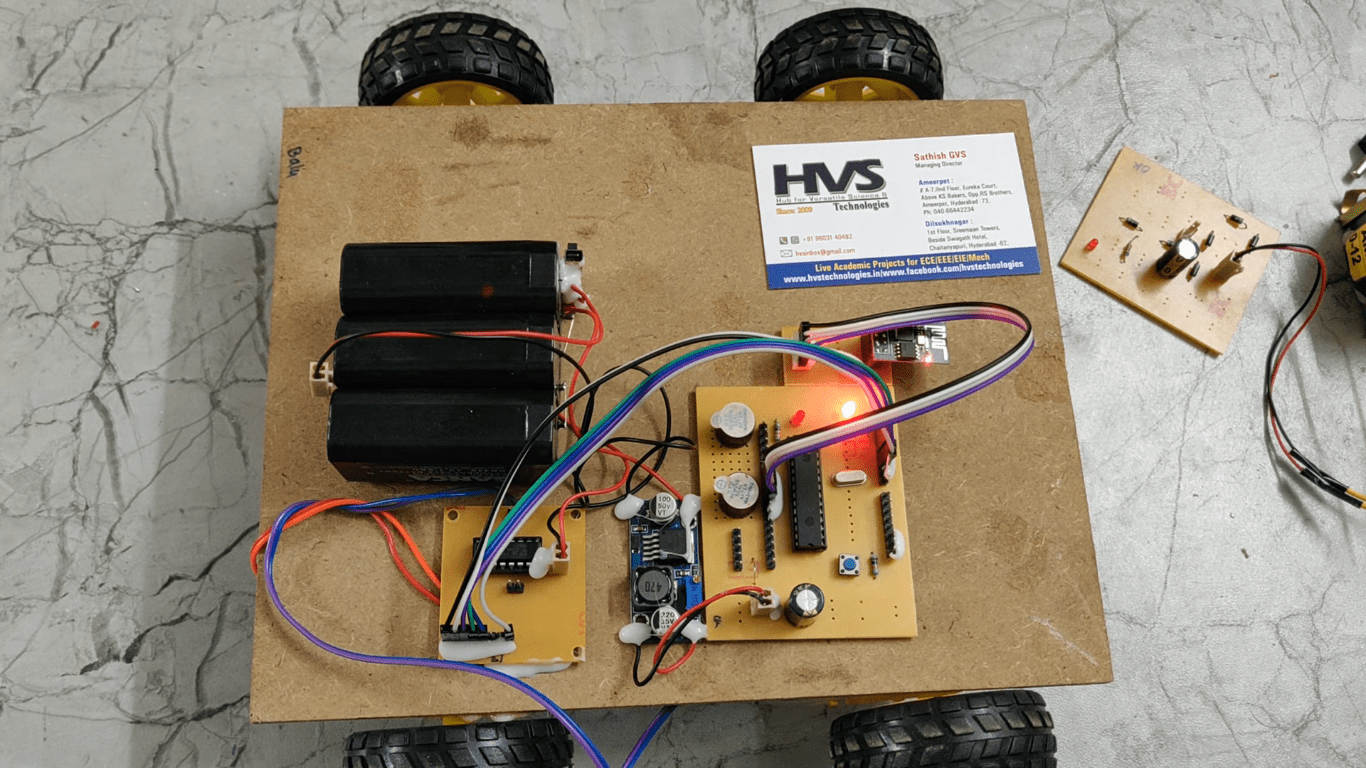
This consists of a Microcontroller based control system, battery powered DC motors and Esp8266 WIFI Module.
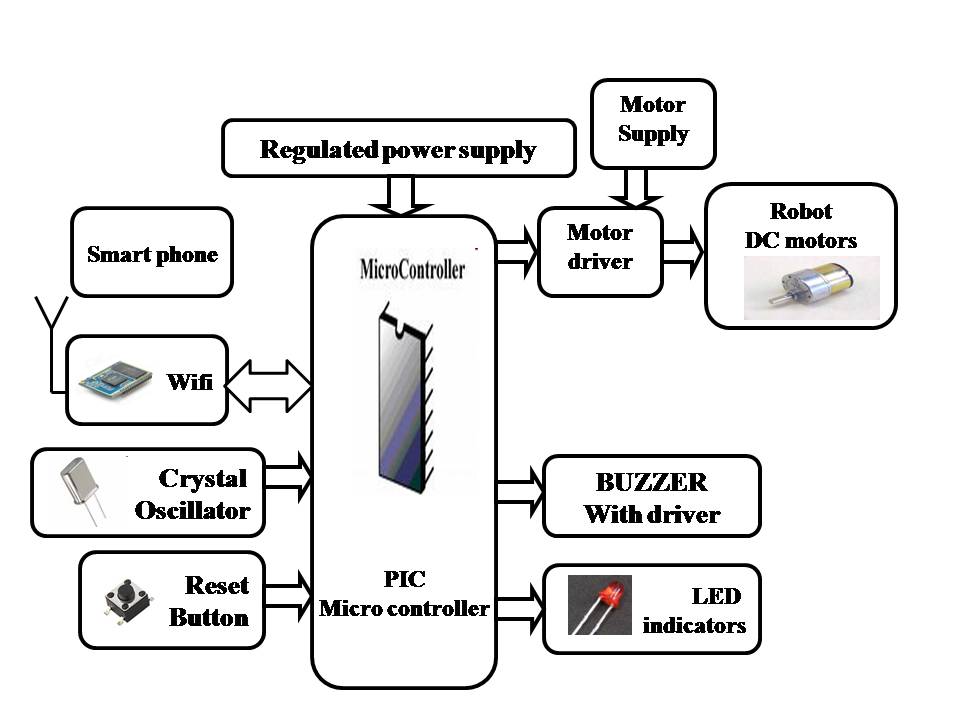
The controlling device of the whole system is a Microcontroller. Wi-Fi module, DC motor along with driver, buzzer with driver is interfaced to the Microcontroller. The data received by the Wi-Fi module from Android smart phone is fed as input to the controller. The controller acts accordingly on the robot movement, this is fed as input to the microcontroller then the microcontroller give the alert through buzzer. In achieving the task the controller is loaded with a program written using Embedded ‘C’ language.
The main objectives of the project are:
 Block Diagram:
video:
Block Diagram:
video:
- Designing of a real time Robot
- Wireless communication using IOT.
- Interfacing of motors to controller.
- IOT technology.
- Embedded C program.
- PCB design layout.
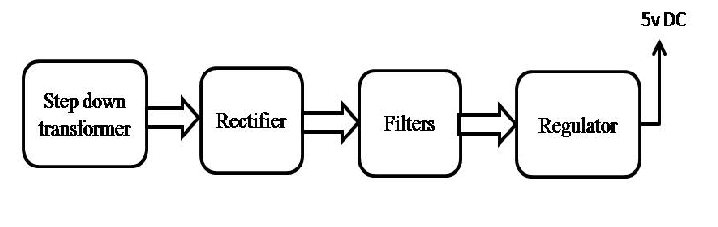
- Regulated Power Supply.
- Microcontroller.
- ESP8266 Wi-Fi module.
- Buzzer.
- DC motors with driver.
- Crystal.
- Reset.
- LED Indicators
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
- Proteus for hardware simulation.
 Block Diagram:
Block Diagram:
 video:
video: