No products in the cart.


The main aim of this project is to detect the human being by using a wireless remote-controlled Robot, which have the sensors that detects the presence of the human being and indicates the presence to user. As it is a wireless Robot it can be easily mobilized and can be controlled. This can be used to detect terrorists/thief inside the building.
RF Communication ranges in between 30 KHz to 300 GHz. RF communication works by creating electromagnetic waves at a source and being able to pick up those electromagnetic waves at a particular destination. These electromagnetic waves travel through the air at near the speed of light. The wavelength of an electromagnetic signal is inversely proportional to the frequency i.e., the higher the frequency, the shorter the wavelength.
In this project we use micro controller, which is programmed to control the input and output modules interfaced to it. The controller makes use of a PIR based input sensor to sense the human being and give us an alert indication.
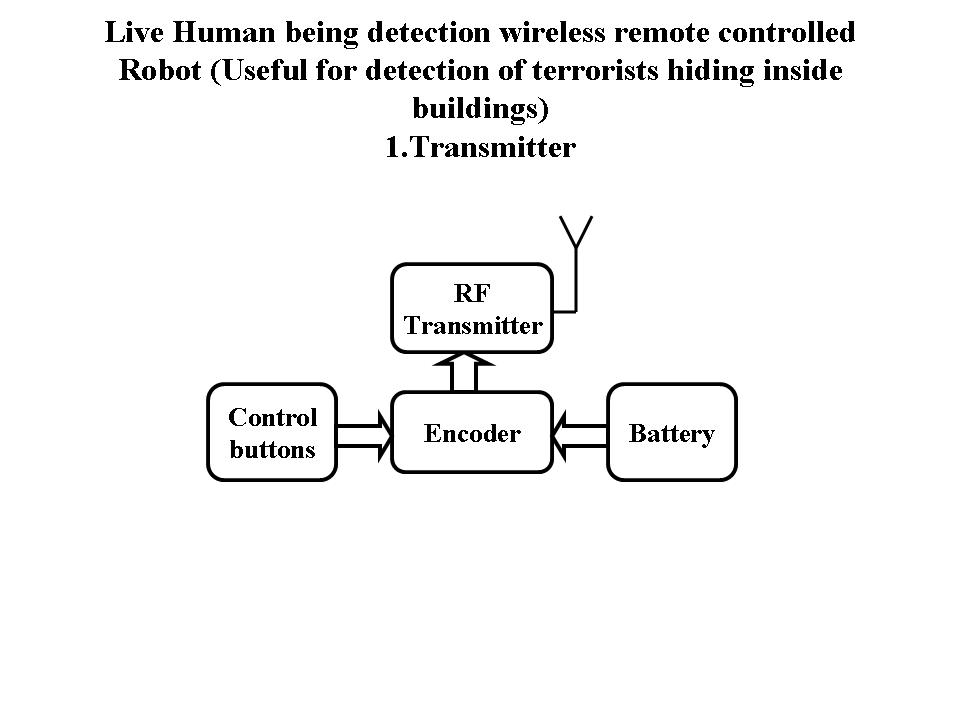
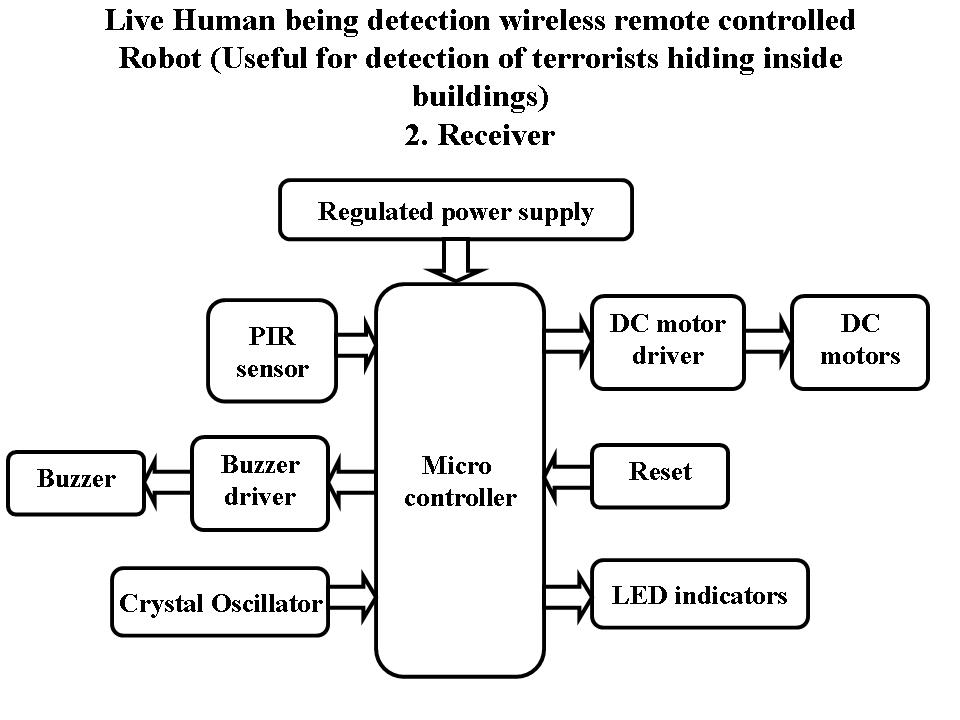
The controlling device of the whole system is a Microcontroller to which RF receiver, PIR sensor and DC motors are interfaced. The remote control has control buttons interfaced to RF transmitter. Whenever a button is pressed, the data related to that button will be transmitted through RF transmitter. This data will be received by RF receiver and is fed to the Microcontroller. The Microcontroller processes this data and acts accordingly on Robot motors. PIR sensor is interfaced to the Microcontroller which continuously monitors human presence and intimates to the controller. The controller alerts through Buzzer if human presence is present. The Microcontroller is programmed using Embedded C language.
The main objectives of this project are:
 video:
video:
- Design of real time robot.
- Wireless control of robot directions and movement.
- Real time human detection.
- Buzzer based alert, if human presence is detected.
- RF communication.
- Interfacing RF receiver to Microcontroller.
- Characteristics of PIR sensor.
- Interfacing PIR with controller.
- DC motor working and need for motor driver.
- Embedded C programming.
- PCB design concepts.
- Regulated Power supply.
- RF transmitter and RF receiver.
- Microcontroller
- Control buttons.
- PIR Module.
- Reset
- DC Motors with driver.
- Buzzer with driver.
- Crystal
- LED Indicators.
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
 video:
video:







