No products in the cart.


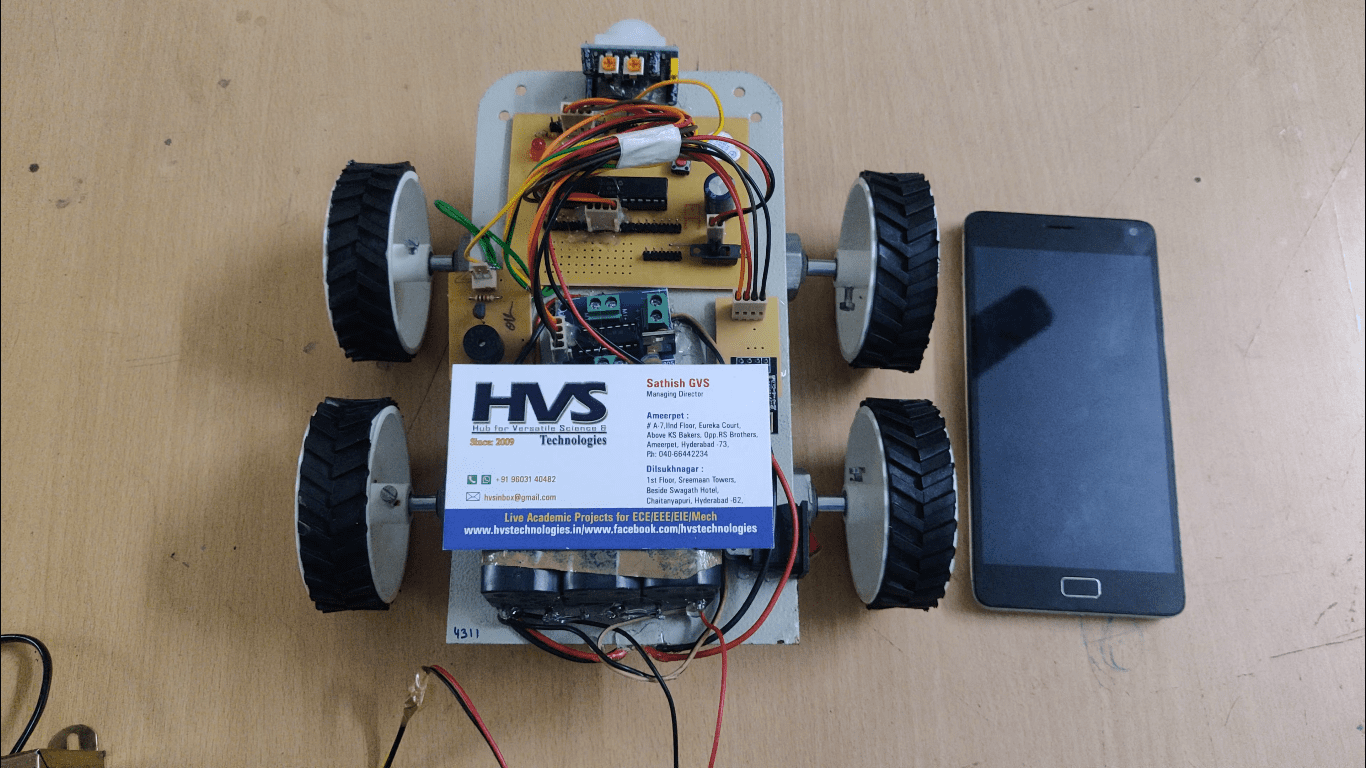
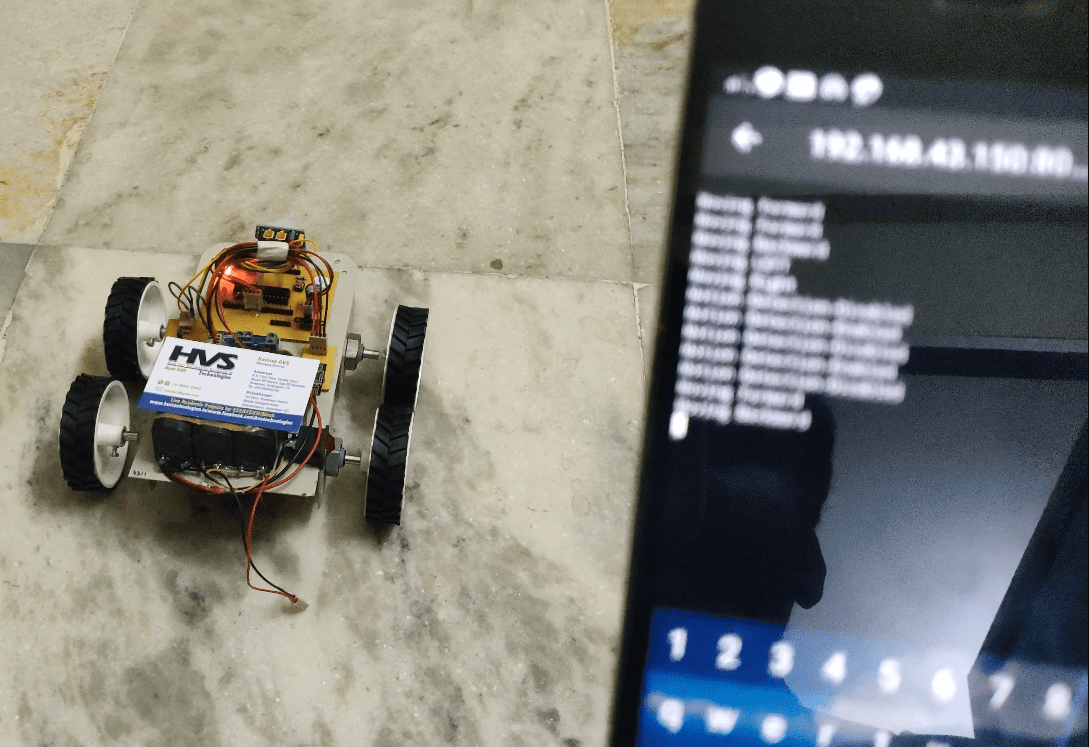
The main aim of this project is to detect the human being by using a wi-fi controlled Robot, which have the sensors that detects the presence of the human being and indicates the presence to user. As it is a wireless Robot it can be easily mobilized and can be controlled. This can be used to detect terrorists/thief inside the building.
Wi-Fi (Short for Wireless Fidelity) is a wireless technology that uses radio frequency to transmit data through the air. Wi-Fi has initial speeds of 1mbps to 2mbps. Wi-Fi transmits data in the frequency band of 2.4 GHz. It implements the concept of frequency division multiplexing technology. Range of Wi-Fi technology is 40-300 feet.
In this project we use micro controller, which is programmed to control the input and output modules interfaced to it. The controller makes use of a PIR based input sensor to sense the human being and give us an alert indication through buzzer.
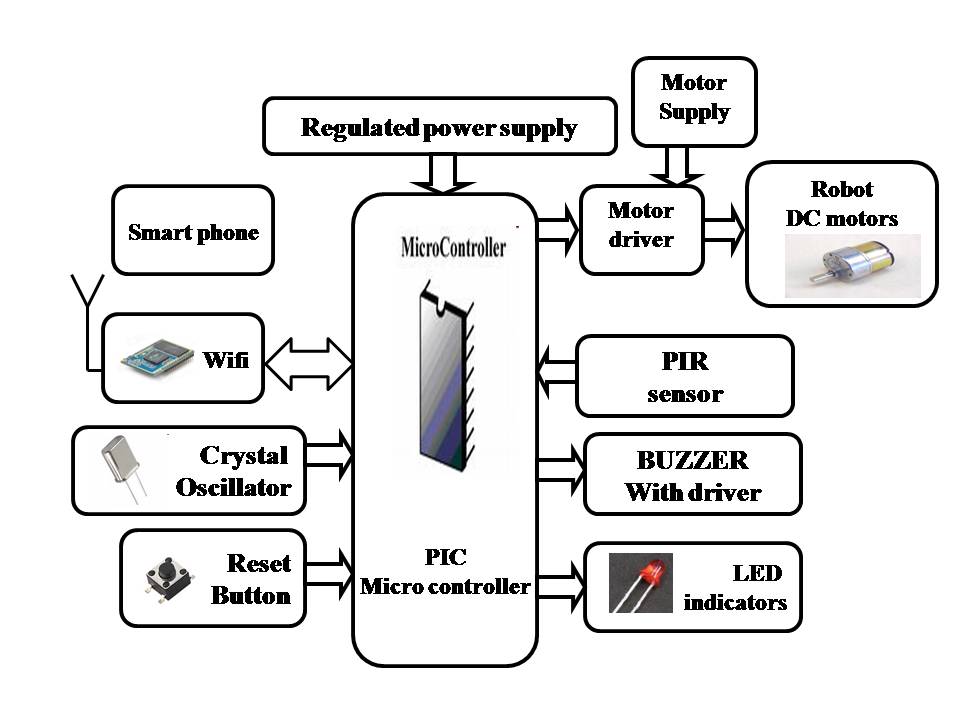
The controlling device of the whole system is a Microcontroller to which Wi-Fi module, PIR sensor, Buzzer and DC motors are interfaced. We can control the robot using smart phone through Wi-Fi. When the user press the button on smart phone this data is received the Wi-Fi module which is connected to the microcontroller. The Microcontroller processes this data and acts accordingly on Robot motors. PIR sensor is interfaced to the Microcontroller which continuously monitors human presence and intimates to the controller. The controller alerts through Buzzer if human presence is present. The Microcontroller is programmed using Embedded C language.
The main objectives of this project are:
 video:
video:
- Design of real time robot.
- Wi-Fi control of robot directions and movement.
- Real time human detection.
- Buzzer based alert, if human presence is detected.
- IOT communication.
- Interfacing WI-FI module to Microcontroller.
- Characteristics of PIR sensor.
- Interfacing PIR with controller.
- DC motor working and need for motor driver.
- Embedded C programming.
- PCB design concepts.
- Regulated Power supply.
- ESP8266 Wi-Fi module.
- Microcontroller
- PIR Module.
- Reset
- DC Motors with driver.
- Buzzer with driver.
- Crystal
- LED Indicators.
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
- Proteus for hardware simulation.
 video:
video: