No products in the cart.


This project prominence on design and implementation of artificial intelligence (AI) enabled robotic trash boat to cleaning the ocean or lake or river which can be works in two modes one is manual and two is automation. This Garbage Boat is a machine which involves collecting debris (trash) from water surface. Clean water is a basic need for all living beings but water gets polluted due to many reasons like sewage waste, industry waste and garbage waste. The lakes in many villages in India are not used for any day-to-day usage because of garbage stagnant. This is the reason which motivates to design and implement this project.
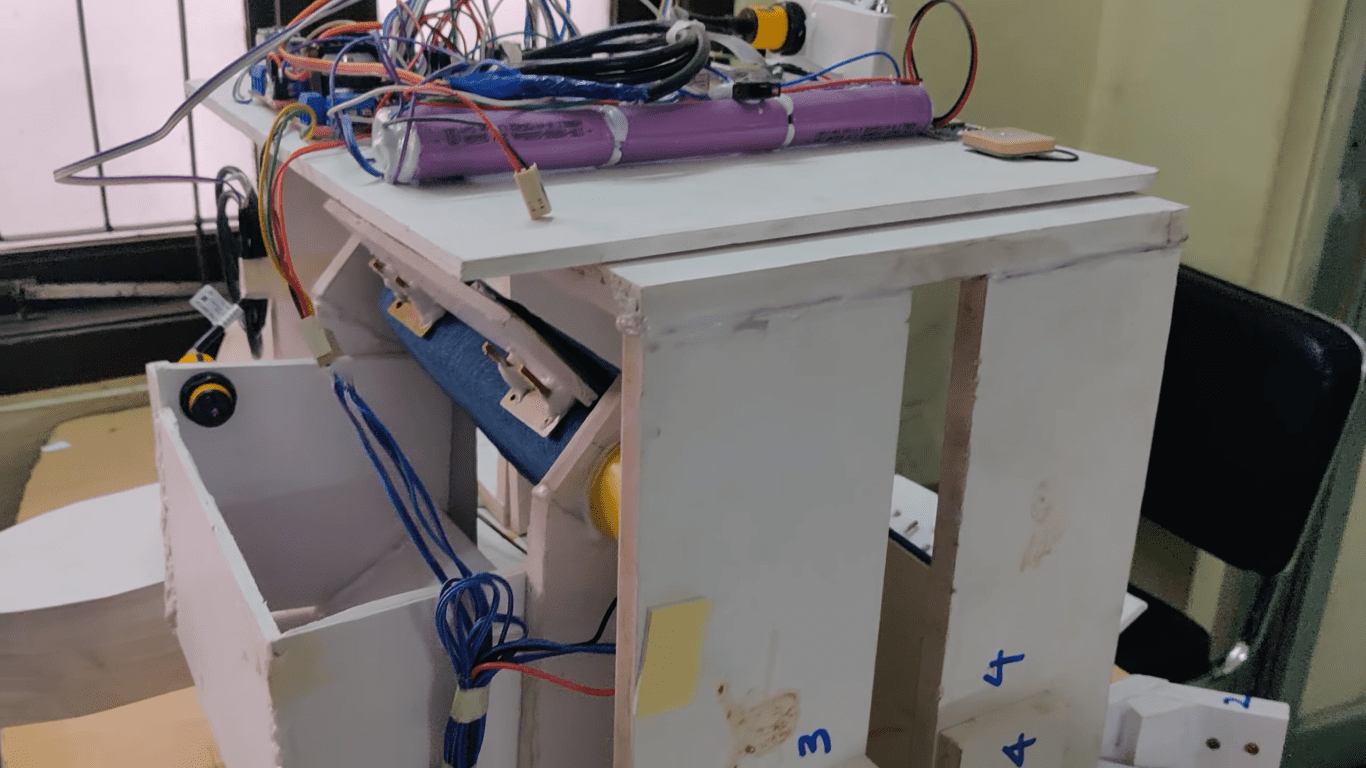
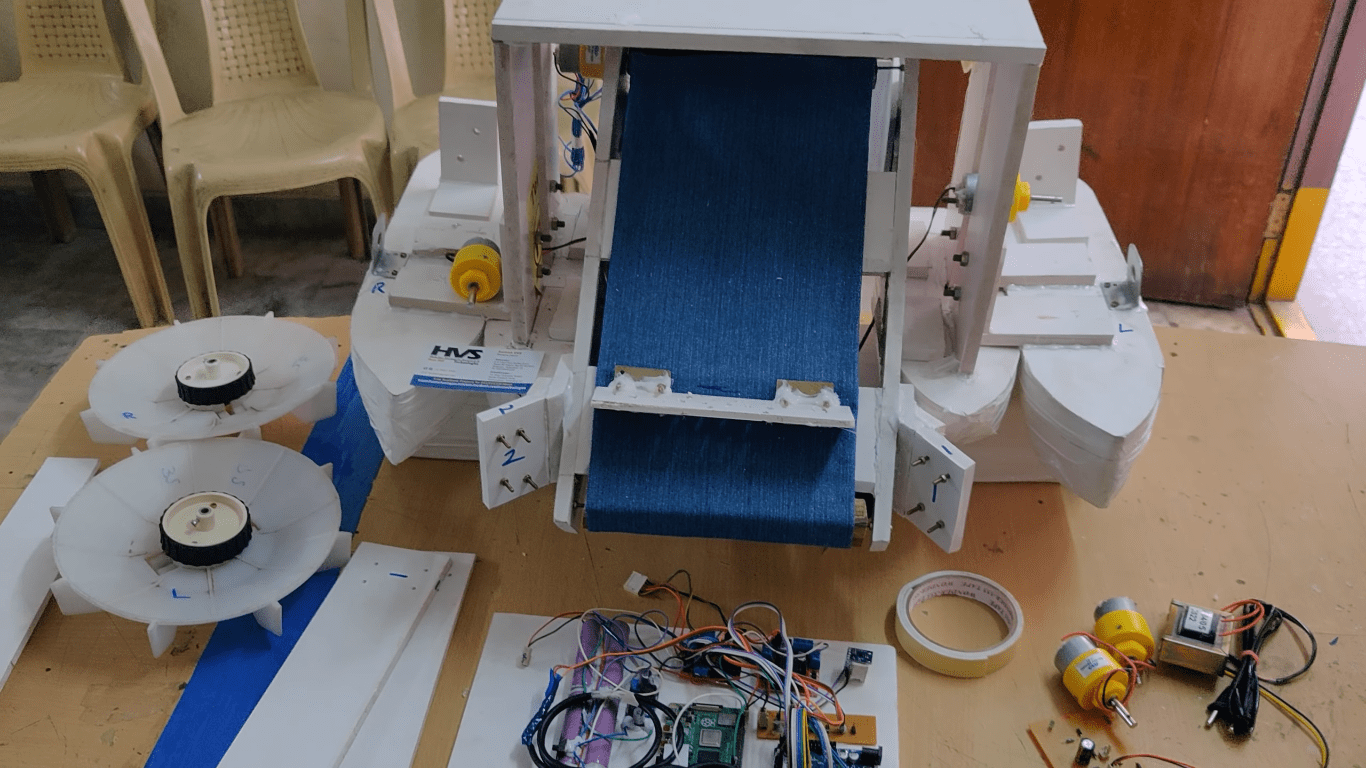
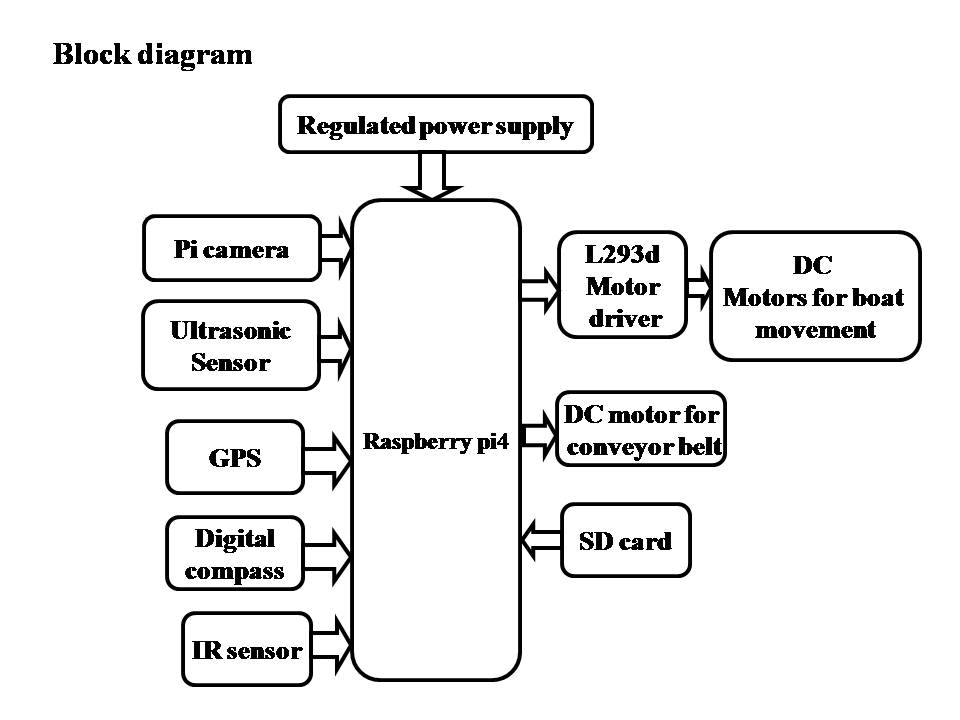
Automatic mode: In this proposed system, an automated boat is used to clean down the floating trash. The system has a Pi camera which is attach to the raspberry pi4 and which detects the trash while moving the boat on water surface by using image processing. The automated boat has conveyor belt setup to collect the floating trash and this will have a bin in the boat where the trash will be stored. Once the trash has been filled the IR sensor will detect it. When IR sensor gives out this information automatically the boat will move to the hub with the help of GPS and DIGITAL COMPASS the trash will be thrown over there.
Manual mode: In this mode boat movement along with conveyor belt can be controlling from web browser while seeing the video by using buttons. This robot consists of ultrasonic sensor to detect and avoid the obstacle while moving on the water surface. Once the trash has been filled the IR sensor will detect it. When IR sensor gives out this information automatically the boat will move to the hub with the help of GPS and DIGITAL COMPASS the trash will be thrown over there.
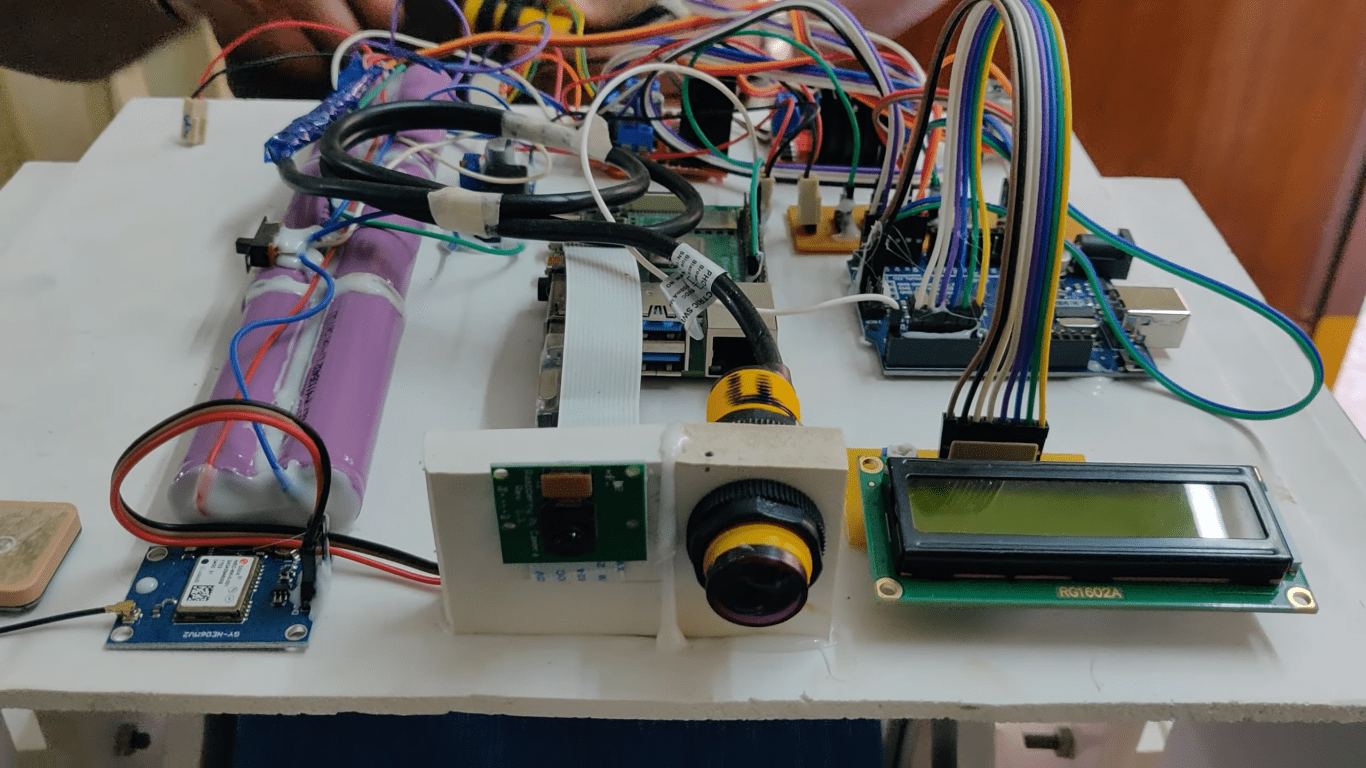
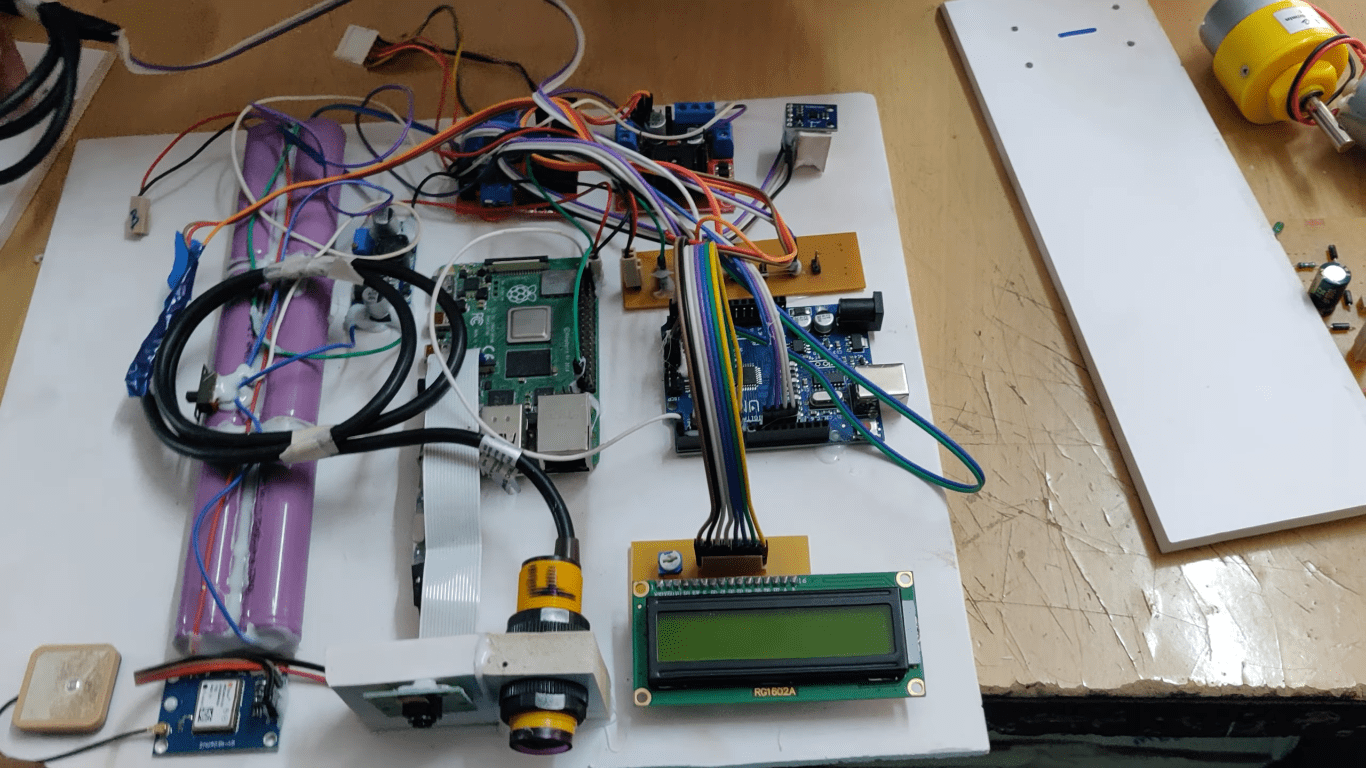
This system will be more advanced as this would collect down the floating trash with the help of the image processing. The main controlling device of the project is Raspberry pi4 processor. To achieve this task raspberry pi loaded program written in python language. The SD card is a key part of the Raspberry Pi3; it provides the initial storage for the Operating System and files. This proposed system uses AI; the CNN improves the image comprehension by learning more discriminative and richer features.
The objectives of the project include:
 video:
video:
- Design an AI and image processing-based garbage collecting boat.
- It can work in two modes manual and automatic.
- Usage of Raspberry Pi4 to achieve the task.
- Using GPS, Digital compass for location tracking.
- IR sensor-based trash detecting system.
- Ultrasonic sensor-based obstacle detection and avoidance system.
- To collect the trash using Conveyor belt setup.
- Regulated Power Supply
- Raspberry Pi4.
- Pi-camera.
- DC motors.
- GPS.
- Pi camera.
- Digital compass.
- IR sensor.
- Ultrasonic sensor.
- Python Programming.
- Artificial Intelligence.
- Linux operating system.
 video:
video:







