No products in the cart.


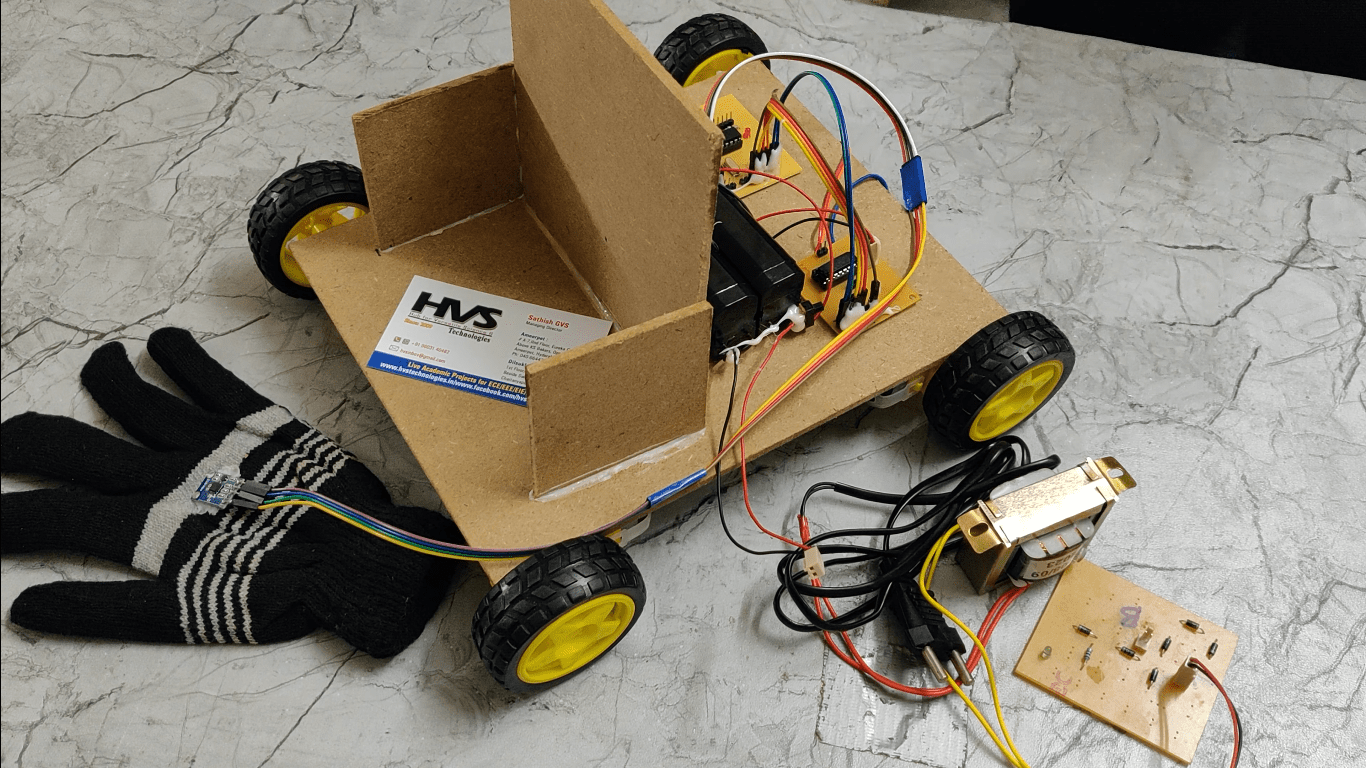

The aim of this project is to controlling a wheel chair by using MEMS ACCELEROMETER SENSOR (Micro Electro-Mechanical Systems) technology. MEMS ACCELEROMETER SENSOR is a Micro Electro Mechanical Sensor which is a highly sensitive sensor and capable of detecting the tilt. This sensor finds the tilt and makes use of the accelerometer to change the direction of the wheel chair depending on tilt. For example, if the tilt is to the right side, then the wheel chair moves in right direction or if the tilt is to the left side, then the wheel chair moves in left direction. Wheel chair movement can be controlled in Forward, Reverse, Left and Right direction.
Automation is the most frequently spelled term in the field of electronics. The hunger for automation brought many revolutions in the existing technologies. One among the technologies, which had greater developments, is the MEMS ACCELEROMETER SENSOR. These had greater importance than any other technologies due its user-friendly nature. MEMS ACCELEROMETER SENSOR based devices can be easily reachable to the common man due to its simpler operation, and at the same time it challenges the designers of the device.
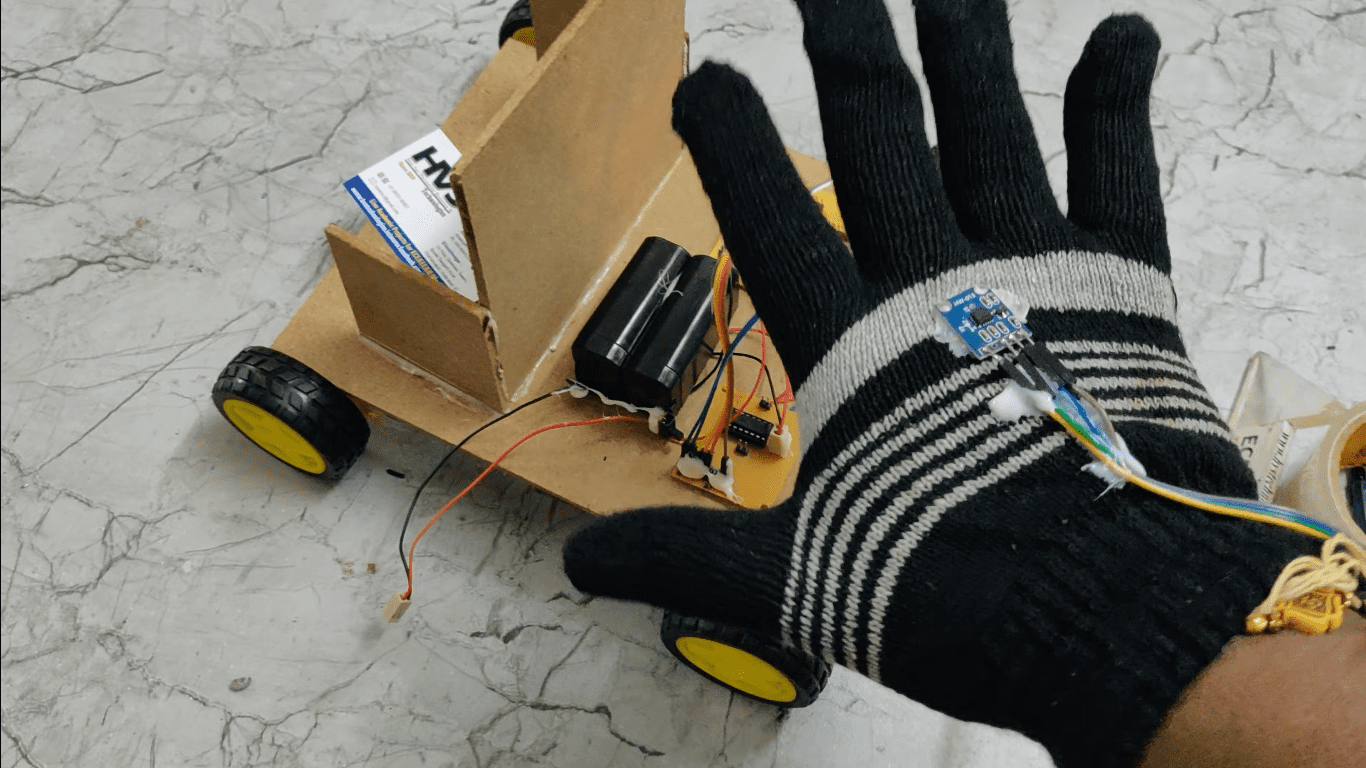
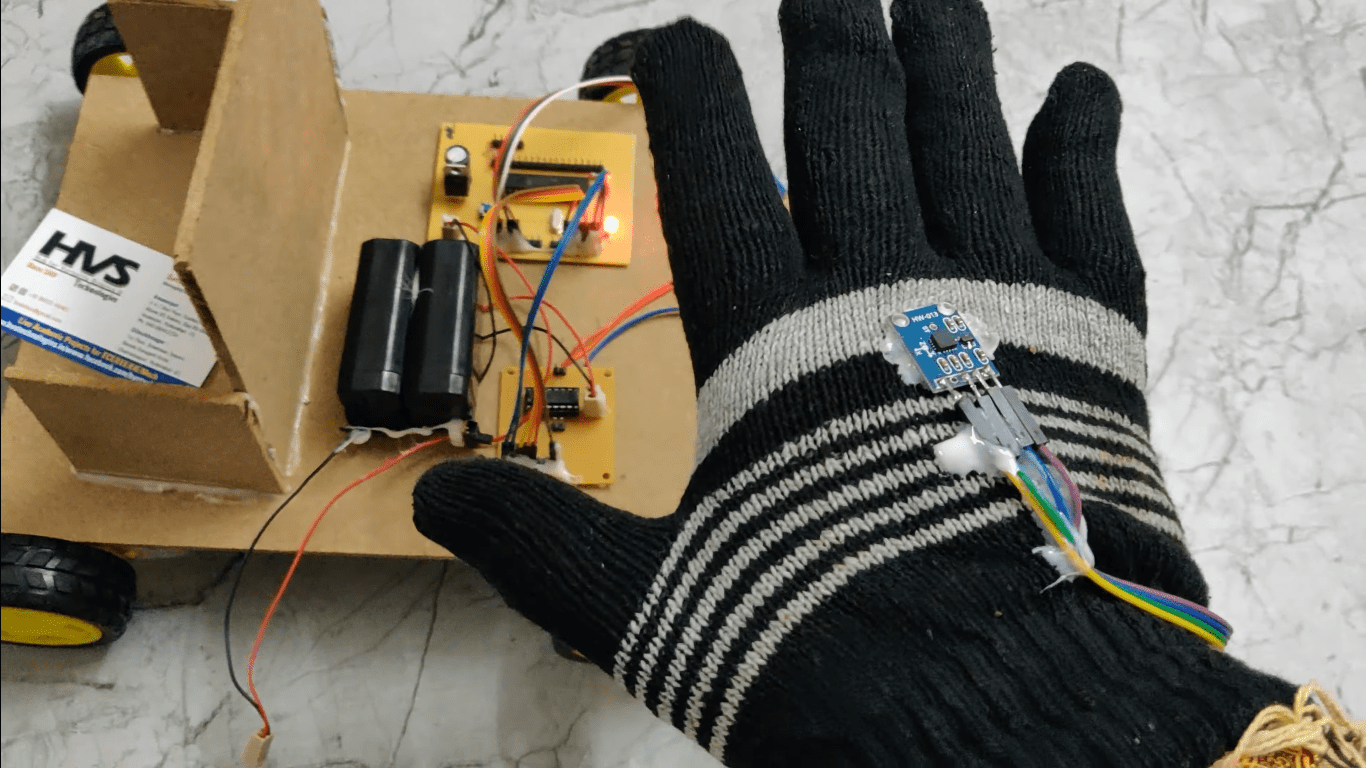
This device is portable and this system operation is entirely driven by wireless technology. User can wear it to his wrist like a watch and can operate it by tilting the MEMS ACCELEROMETER SENSOR Accelerometer sensor.
This project makes use of a PIC micro controller, which is programmed, with the help of embedded C instructions. This PIC microcontroller is capable of communicating with transmitter and receiver modules. The MEMS ACCELEROMETER SENSOR based sensor detects the tilt and provides the information to the PIC microcontroller (on board computer) and the controller judges whether the instruction is right movement or left movement instruction and controls the direction respectively. The controller is interfaced with two DC motors to control the direction of the wheel chair. To perform the task, Microcontroller is loaded with an intelligent program written in embedded ‘C’ language.
The main objectives of the project are:
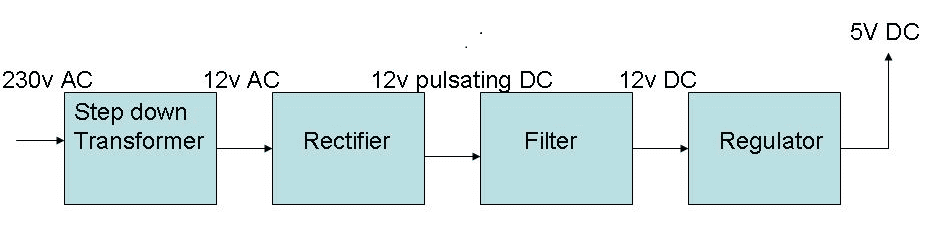
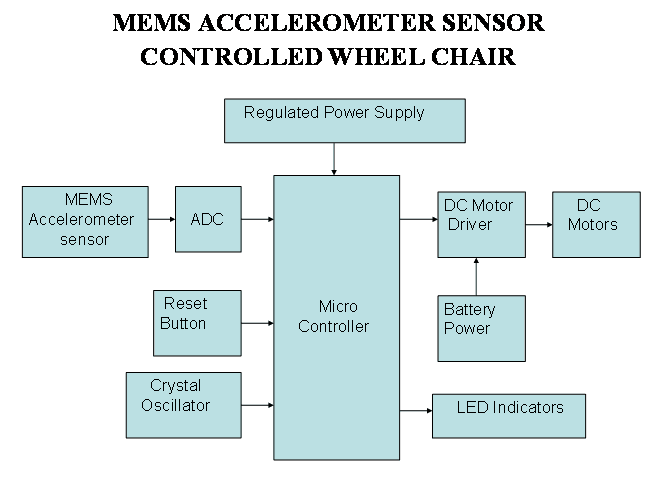
 Block Diagram:
video:
Block Diagram:
video:
- Designing and construction of a wheel chair for disabled.
- Automated controlling of wheel chair.
- Usage of MEMS sensor for gestures-based controlling.
- Characteristics of MEMS ACCELEROMETER SENSOR
- Interfacing Motors with Microcontroller.
- Interfacing MEMS ACCELEROMETER SENSOR with Microcontroller.
- Embedded C programming.
- PCB Design and development.
- Battery Power Supply.
- PIC Microcontroller.
- MEMS ACCELEROMETER SENSOR.
- Crystal oscillator.
- Reset Button.
- DC motors with driver.
- LED indicators.
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
 Block Diagram:
Block Diagram:
 video:
video:







