Subtotal ₹14,250.00


Autonomous Robot with Artificial Vision for Obstacle Detection
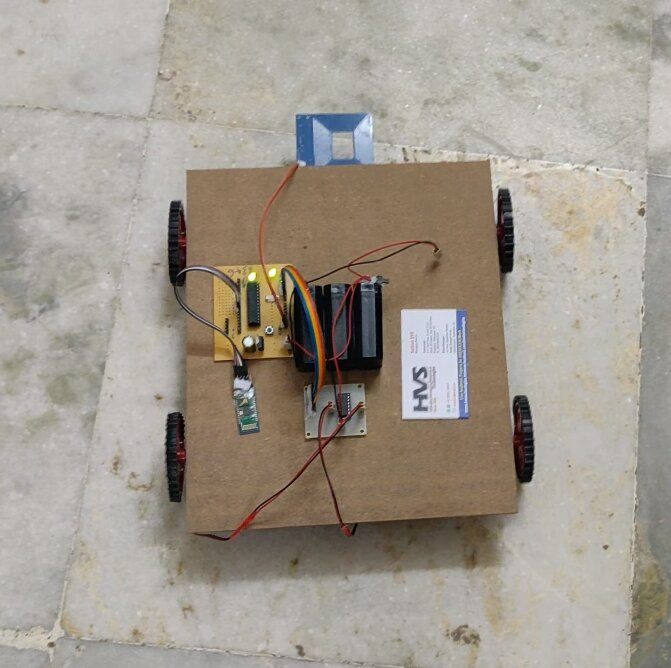
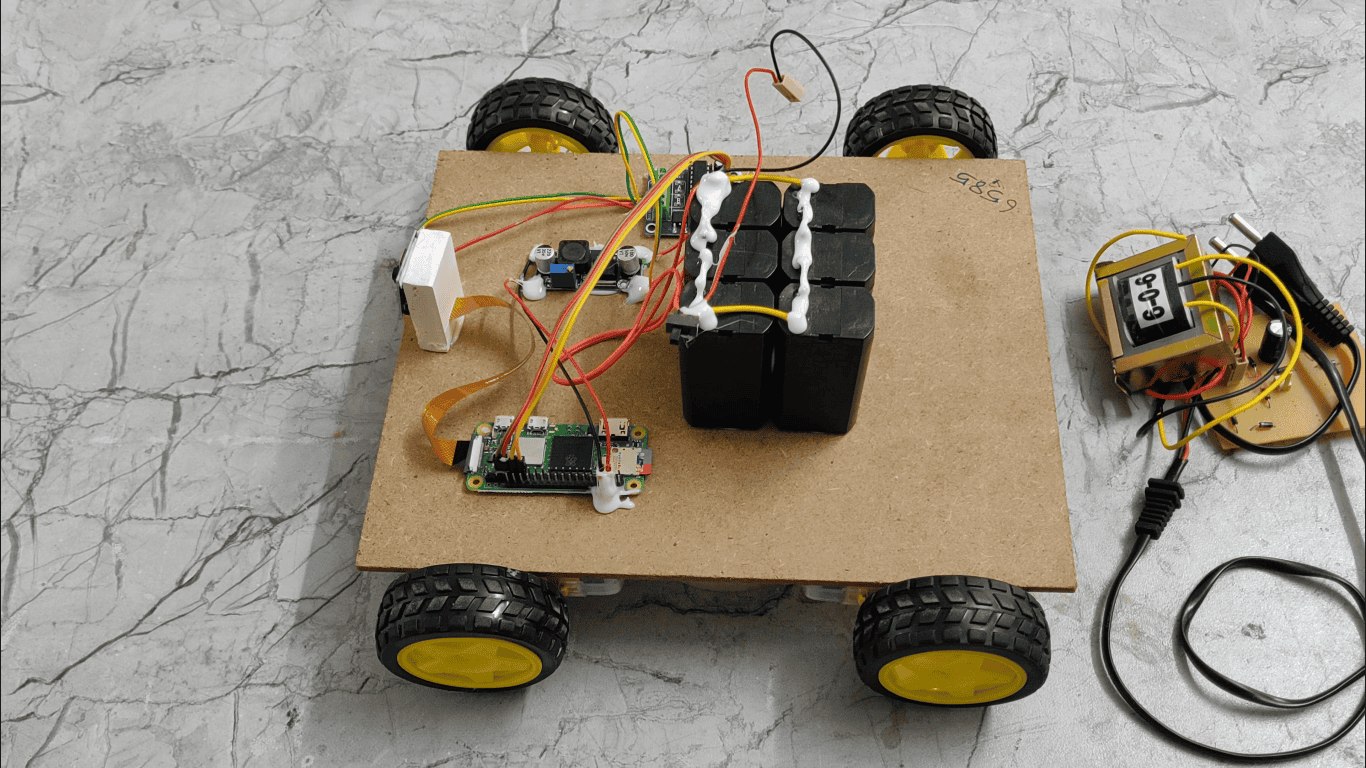
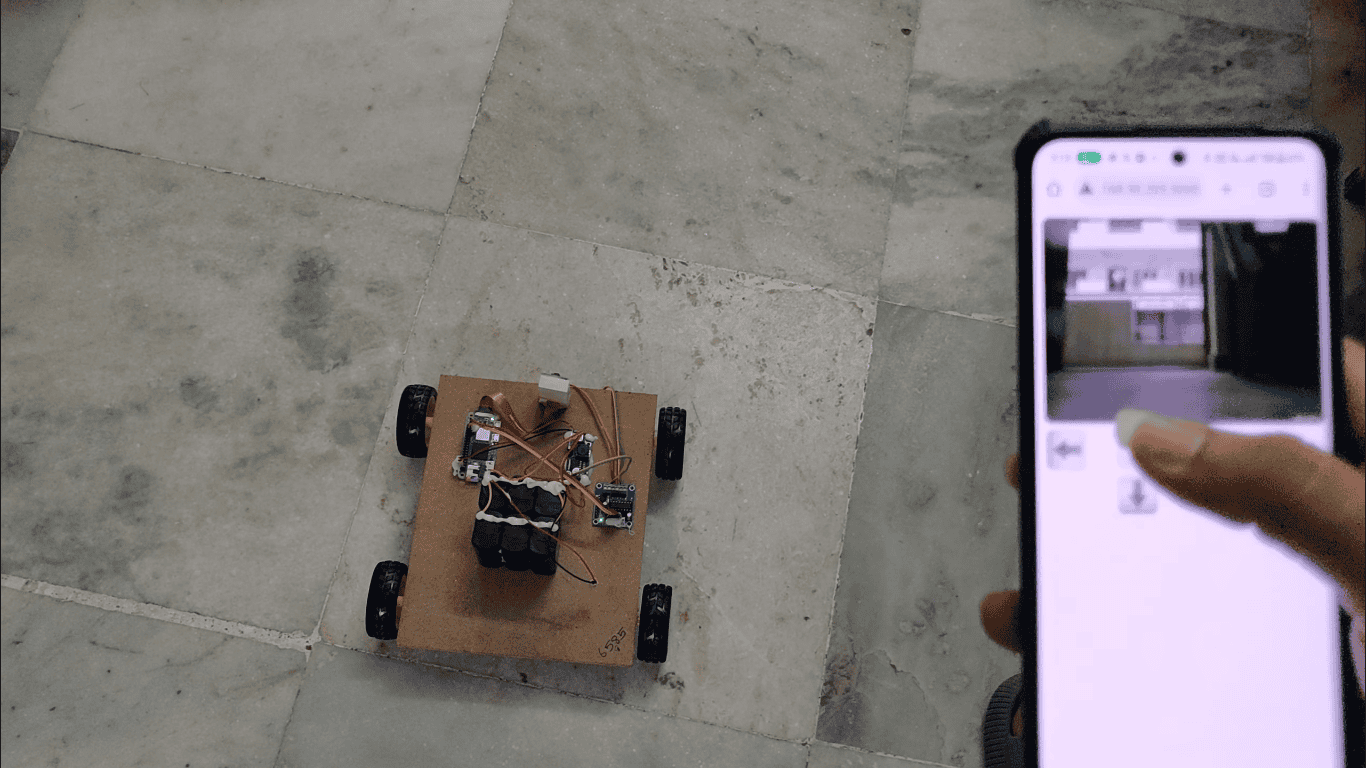
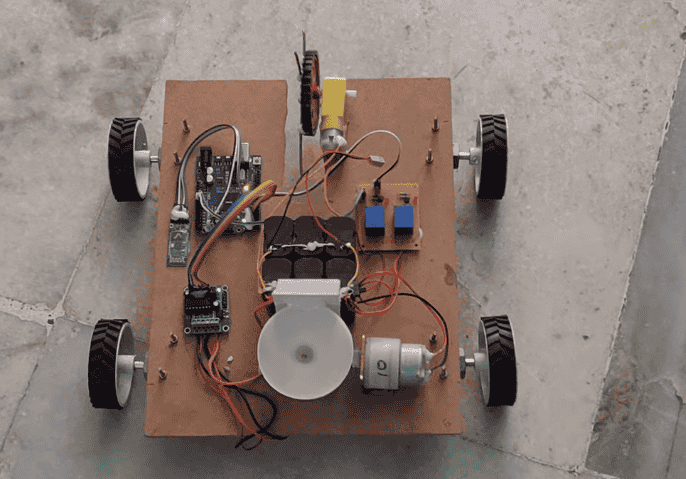
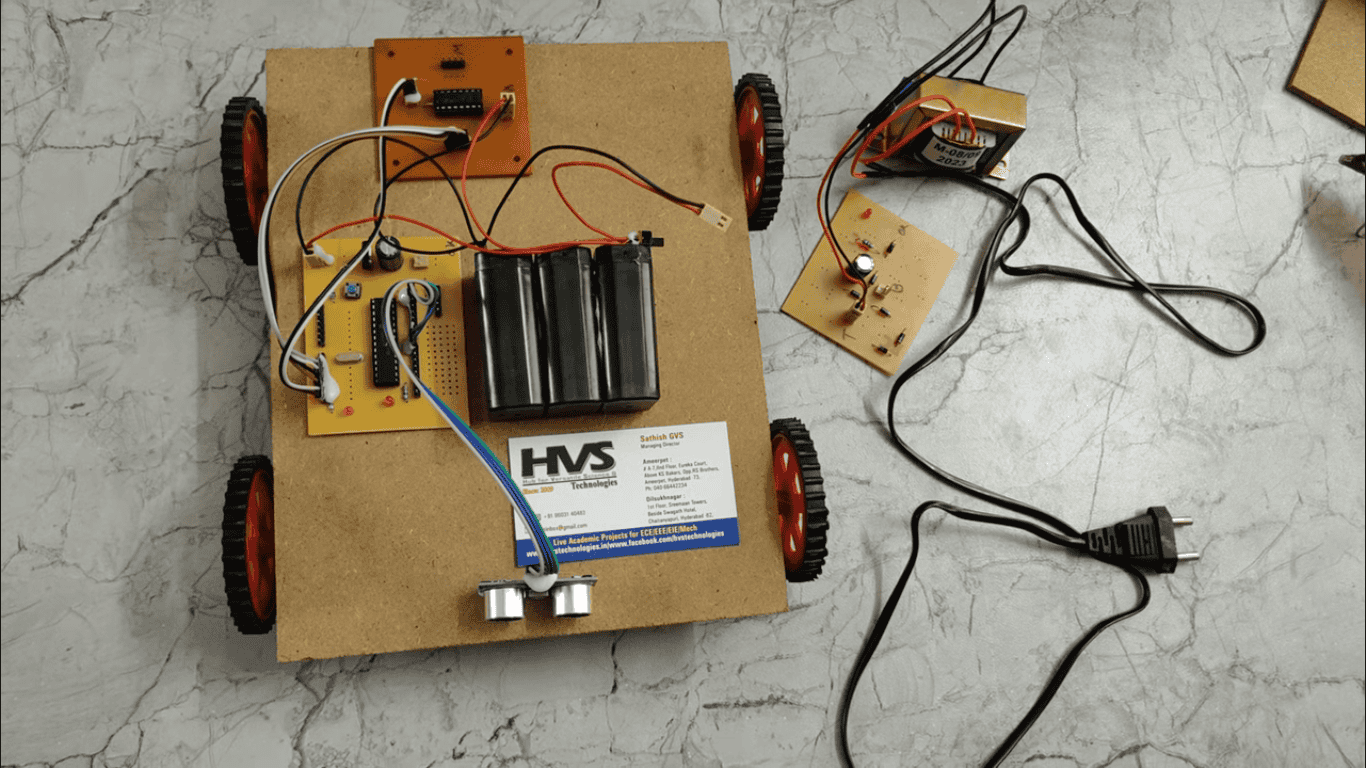
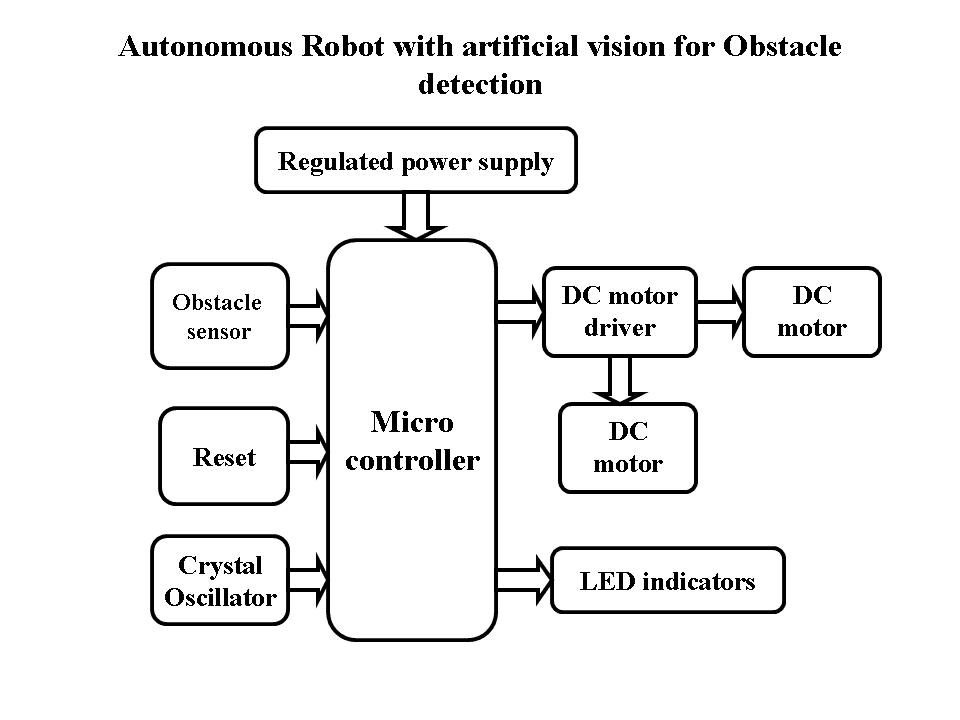
The purpose of this project is to build an Obstacle detection Robot. This Robot automatically senses the presence of obstacle in its path and changes its direction of movement. This consists of a Microcontroller based control system, battery powered DC motors and obstacle Sensor. This autonomous robot senses the obstacle in its path. If any obstacle comes in its vicinity, then this information is passed onto the Microcontroller. Now the Microcontroller takes necessary action like taking the diversion, reversing the robot direction etc. This robot is designed in such a way that there is no requirement of manual attention towards it. It makes use of the obstacle sensor to detect the obstacle present in its expected trajectory and dynamically changes the trajectory to be followed. The main objectives of the project are:- Designing of a Robot.
- Obstacle detection.
- Automatic diversion mechanism.
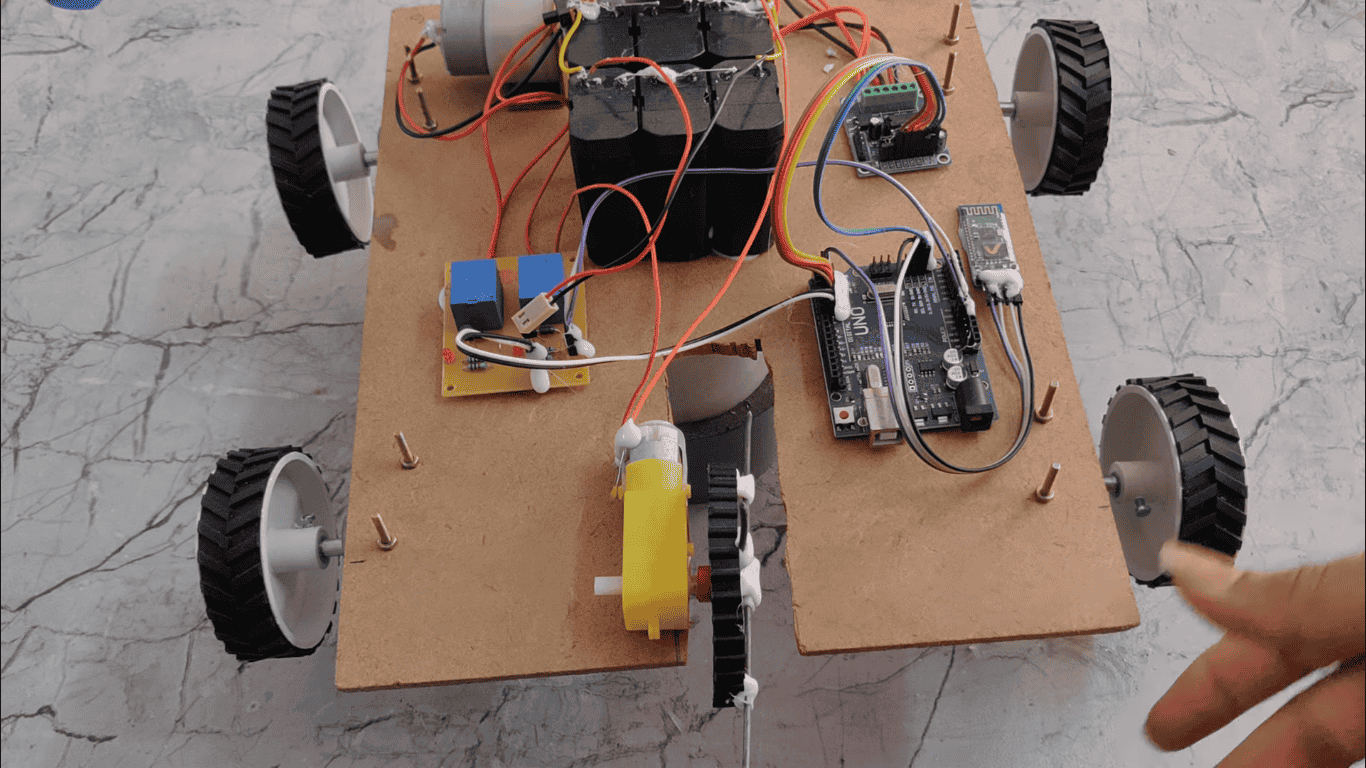
- Interfacing of motors to controller.
- Obstacle sensor characteristics.
- Interfacing Ultrasonic sensor to the controller.
- Embedded C programming.
- PCB design layout.
- Regulated Power Supply.
- PIC Microcontroller.
- Obstacle sensor (Ultrasonic sensor).
- DC motors with driver.
- LED Indicators.
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
 Video
Video