No products in the cart.







Virtual Telepresence Robot Using Raspberry Pi
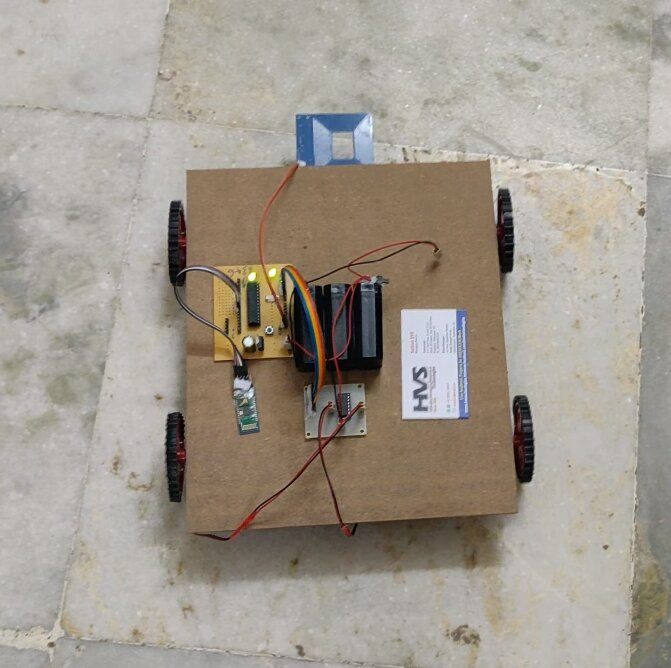
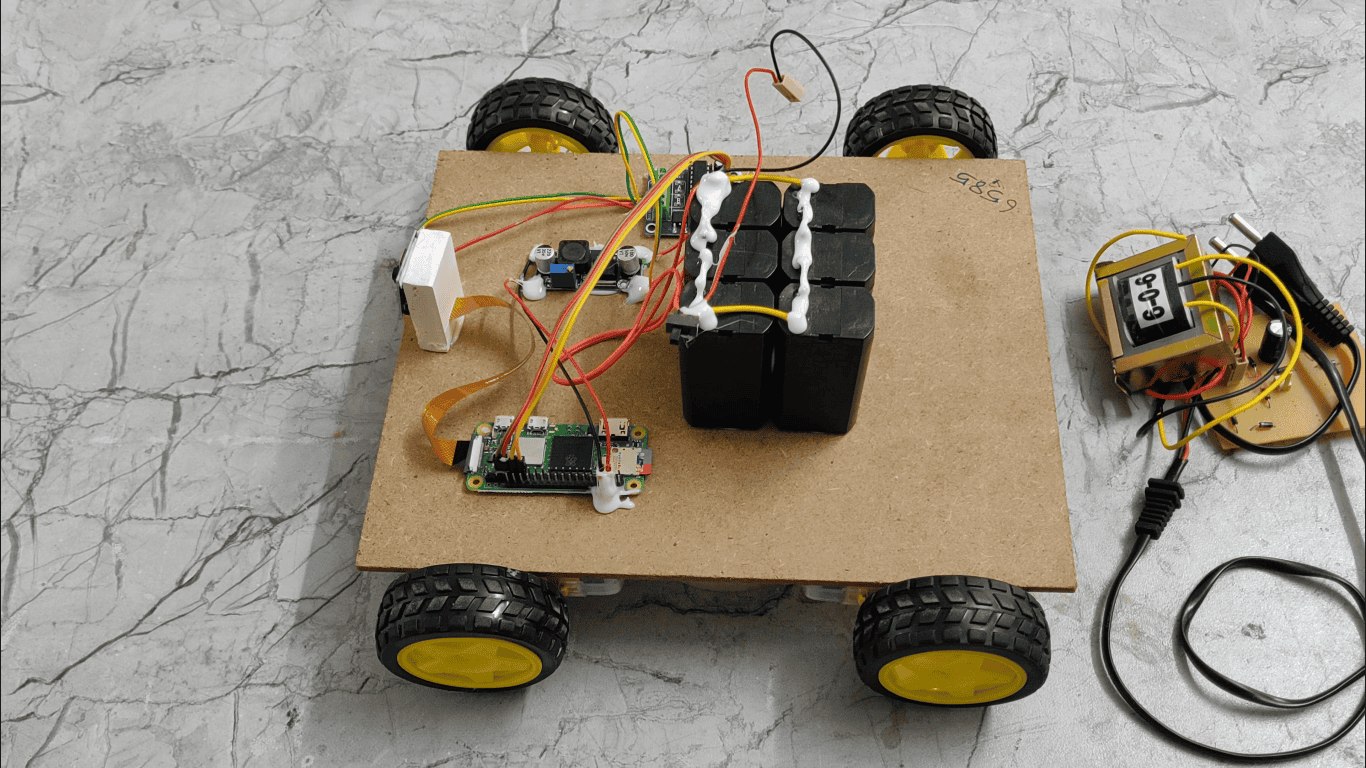
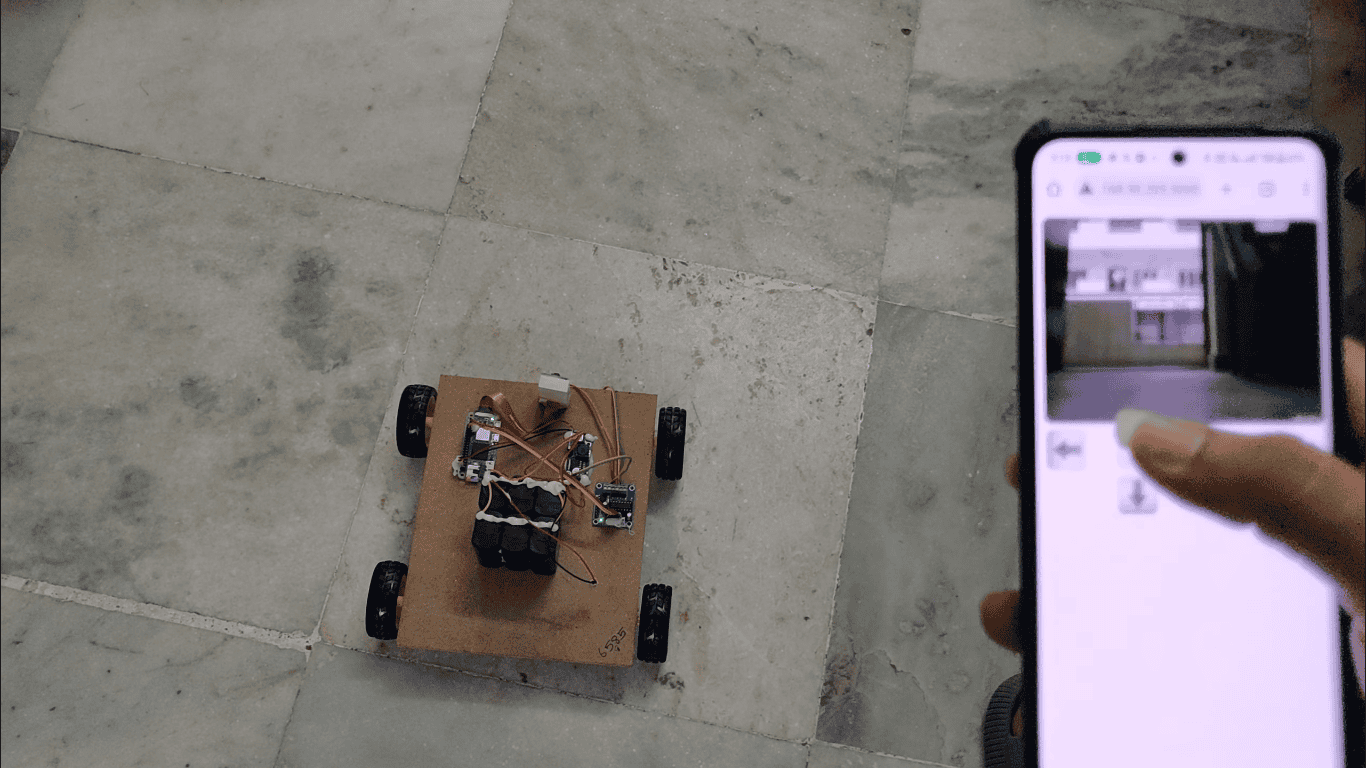
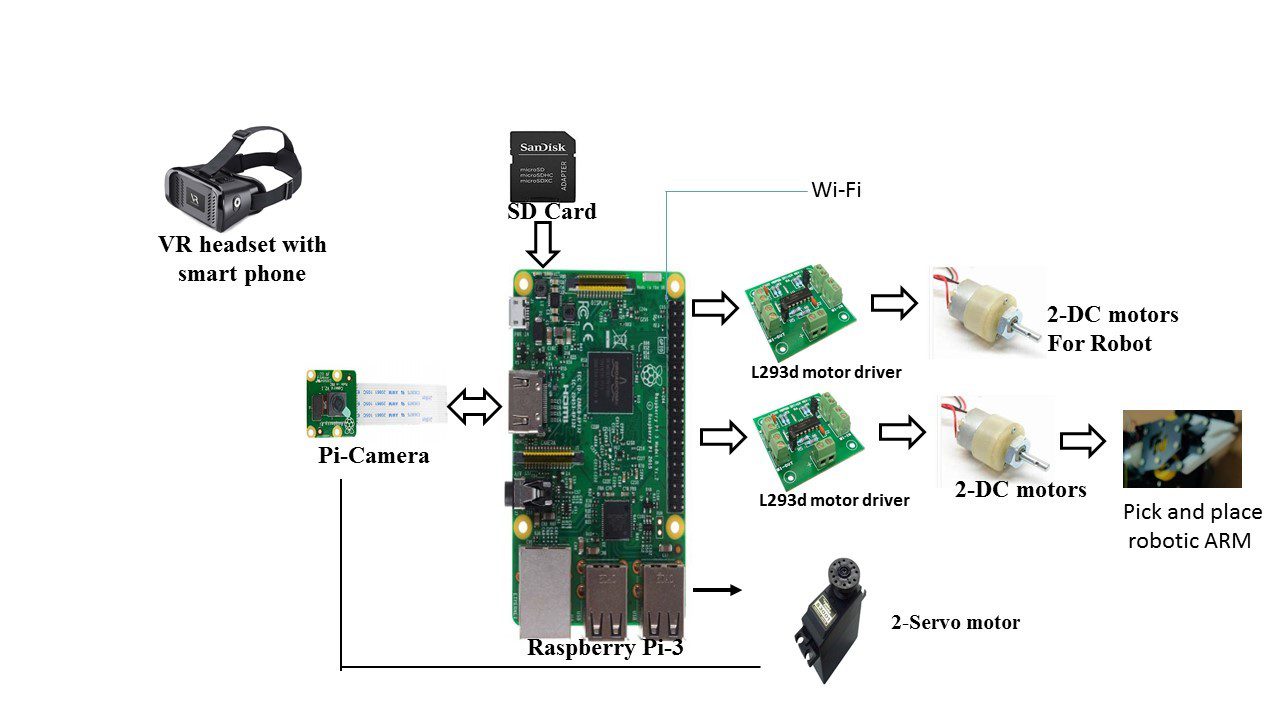
The main of the project is to design a Wi-Fi controlled Robot along with robotic arm for virtual telepresence using Raspberry pi and pi camera. In this project the smartphone reads the accelerometer and magnetometer data of the direction in which the user turns his head, say, right or left. This data is sent to the modem over Wi-Fi and to the Raspberry Pi board, which, in turn, provides these values as inputs to the servo motors. In this user will control the robot like forward, backward, left and right directions and control the ARM also from web browser like up and down, open and close motions with the help of spur gear and warm gear mechanism. The Raspberry Pi is a low cost, credit-card sized computer that can be used in electronics projects. It is a capable little device that enables people of all ages to explore computing, and to learn how to program in languages like Scratch and Python. It’s capable of doing everything you’d expect a desktop computer to do, from browsing the internet and playing high-definition video, to making spreadsheets, word-processing, and playing games. The task of the project is achieved by using Raspberry pi. This robot with a Pi camera is placed in a remote location to capture the environment in visual form using Raspberry Pi. The captured visuals are displayed on the user’s virtual reality (VR) headset. The robot can also be moved in any direction (in which the user turns his head, say, right or left) through a web applications installed in the user’s smartphone The main objectives of the project:- The robot should be able to move forward, backward, left and right on its four wheels with the components on board by receiving commands from WEB browser.
- ARM also can move open and close, up and down directions for pick and place the objects by receiving the commands from web browser.
- The pi camera is to capture clear, real-time visuals of the area in front. The camera moves in the same direction as the VR headset.
- Video stream data from the camera should be sent to the Raspberry Pi over the Wi-Fi for being displayed to the user’s screen.
- Using Raspberry pi to achieve this task.
- Power bank for raspberrypi3.
- 12v1ahm rechargeable battery for robot
- Raspberry pi3processor.
- SD card.
- Pi camera
- VR head set
- Servo motors
- L293d motor drivers.
- DC motors
- Robot chases.
- Smartphone with internet connection.
- Python Programming.
- Linux OS, Express SCH for Circuit design.
- Wireless IMU is used to control the servo motors.
- Dual Screen Mod Browser is used for live video.
- Network analyzer to get the IP address of raspberry pi.
 Video
Video