No products in the cart.


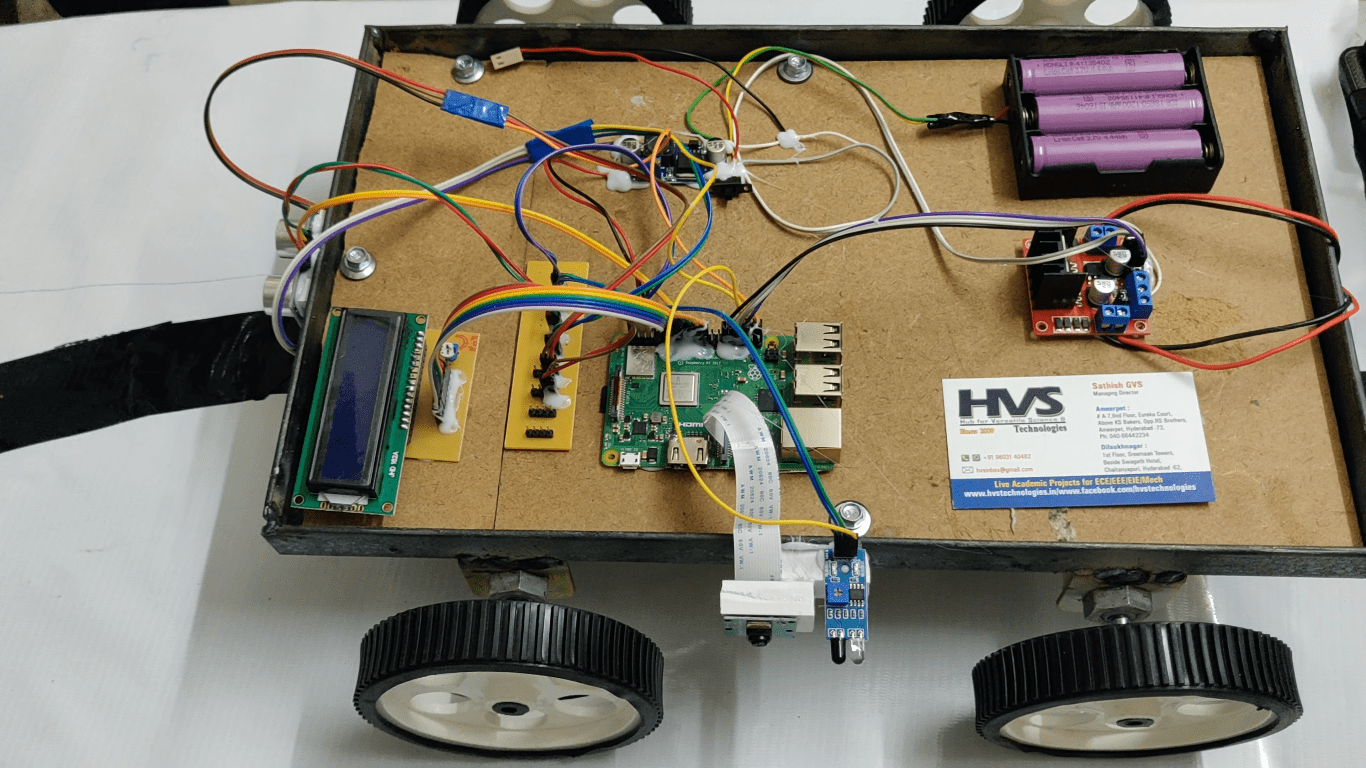
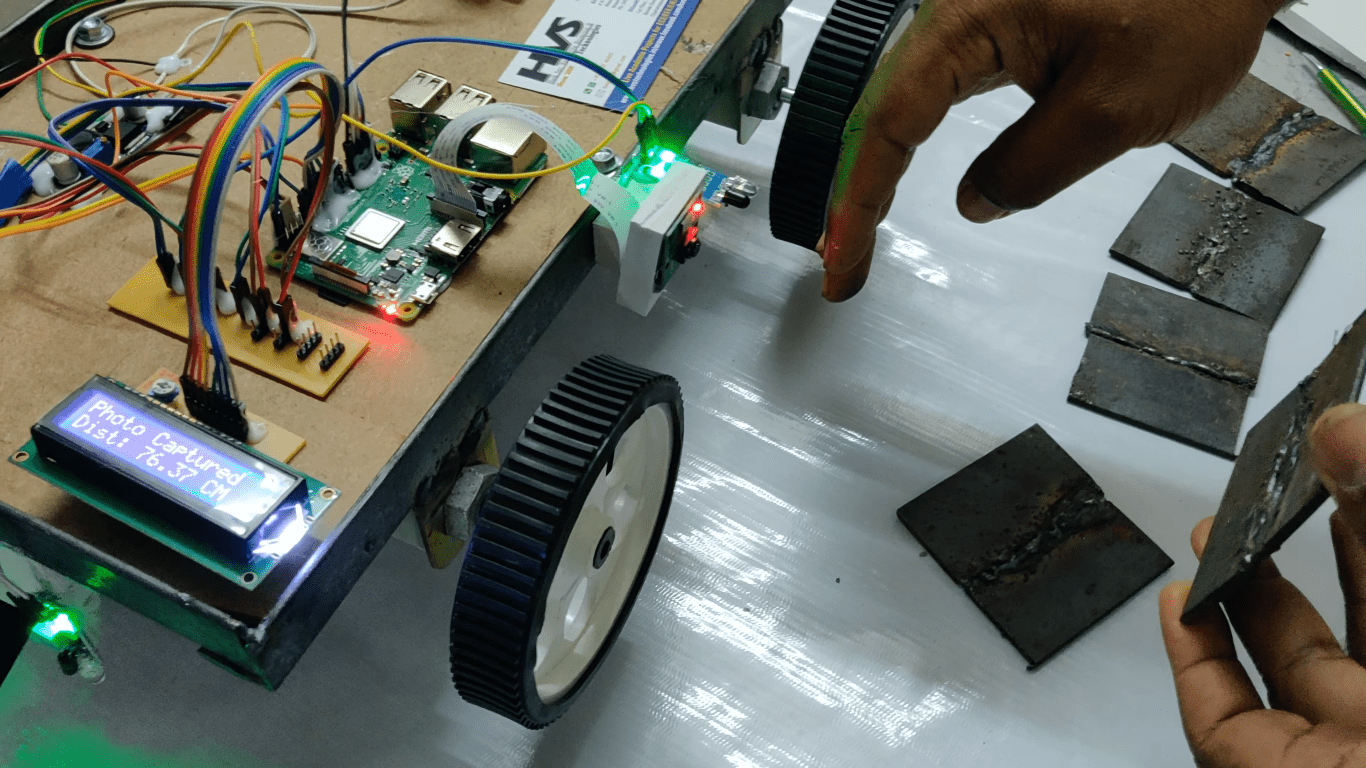
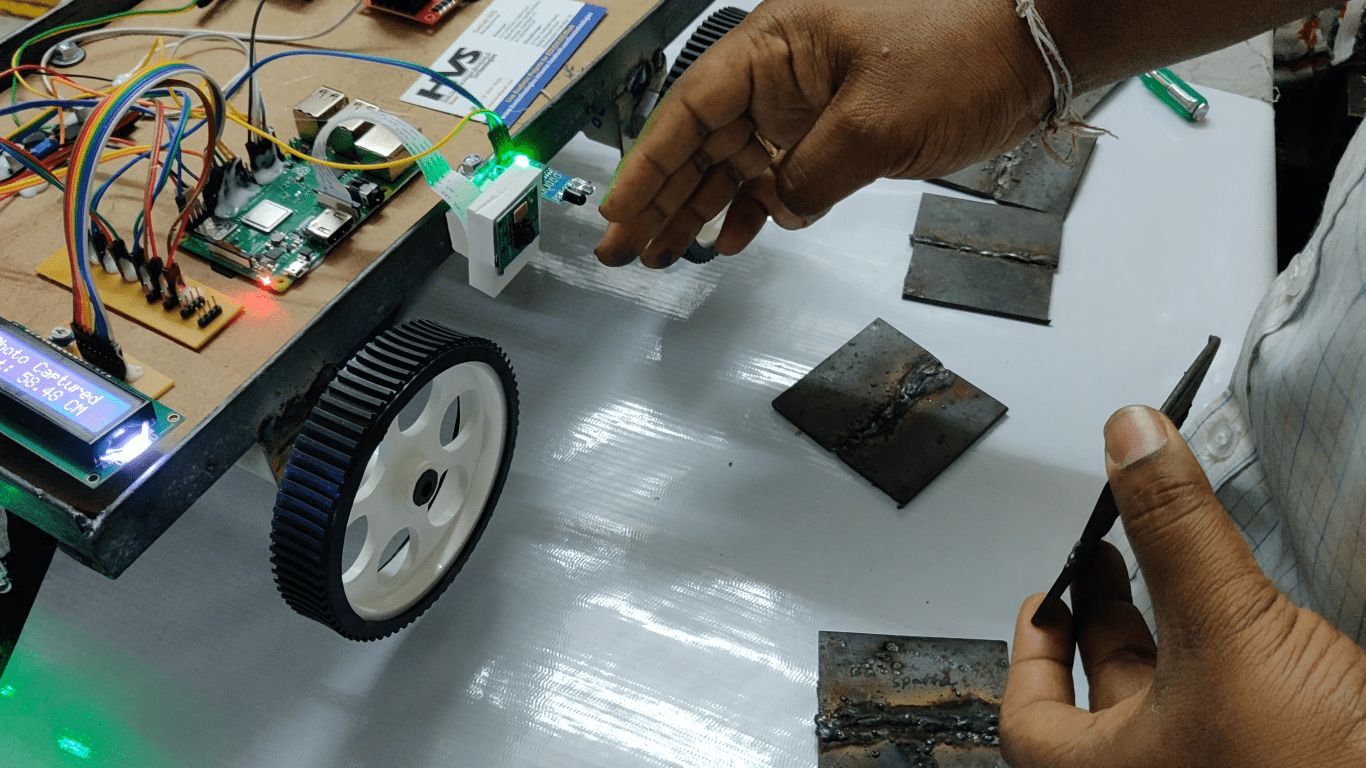

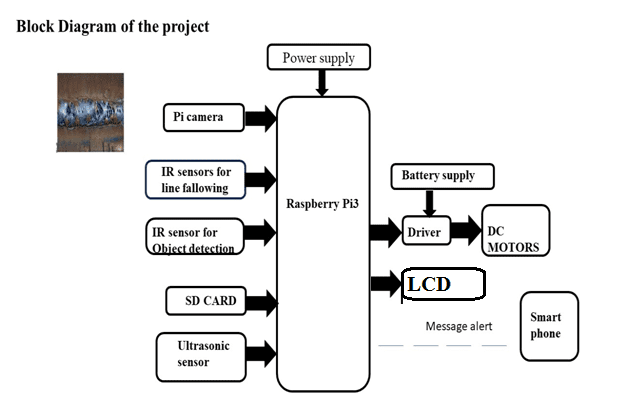
This project proposes a method for welding defect detection using IoT and image processing techniques. The system utilizes an IR sensor-based line-following robot equipped with a Raspberry Pi camera and an ultrasonic sensor for obstacle detection. The robot navigates along the welding seam, capturing images of the weld. These images are then processed using image processing algorithms to detect any welding defects. This system can display the welding defect on LCD display. The system can provide real-time feedback on the quality of the weld, helping to ensure high-quality welding operations.
 video:
[/iframe
video:
[/iframe
The major features of this project are:
- pi camera and image processing based automatic WELDING DEFECT detection.
- Automatic obstacle detection using Ultrasonic sensor.
- Automatic obstacle detection and vehicle control system.
- Automatic line following using IR sensors.
- Automatic object detection using IR sensor.
- IOT based alert intimation to the user.
- Automatic welding defect detection and monitoring and also alerting system.
- To achieve this task using Raspberry pi3processor.
- Li-ion battery Power Supply.
- Raspberry pi3.
- Pi camera.
- IR sensors.
- Ultrasonic sensor.
- SD card.
- LCD display.
- DC motor with L293d motor driver
- Raspbian OS.
- Python Language.
- Image Processing.
 video:
[/iframe
video:
[/iframe 






