No products in the cart.


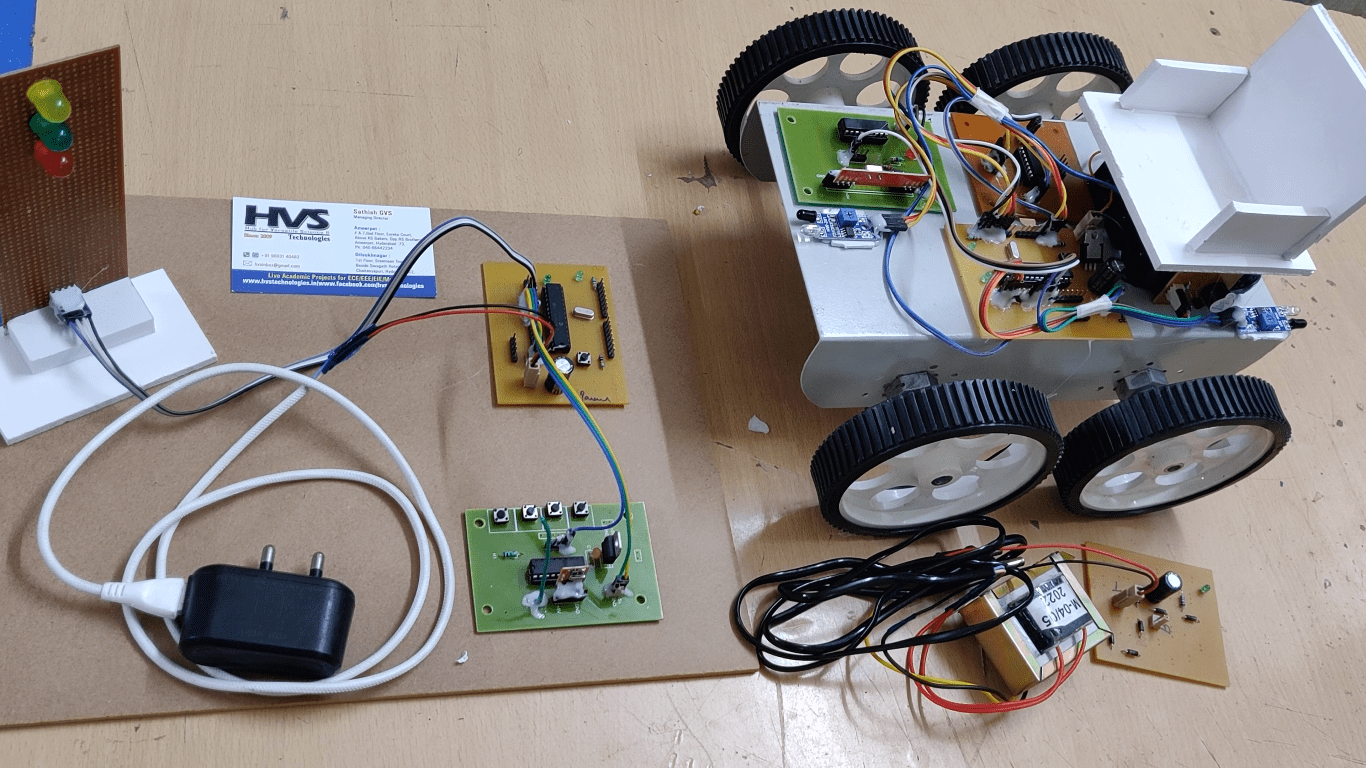

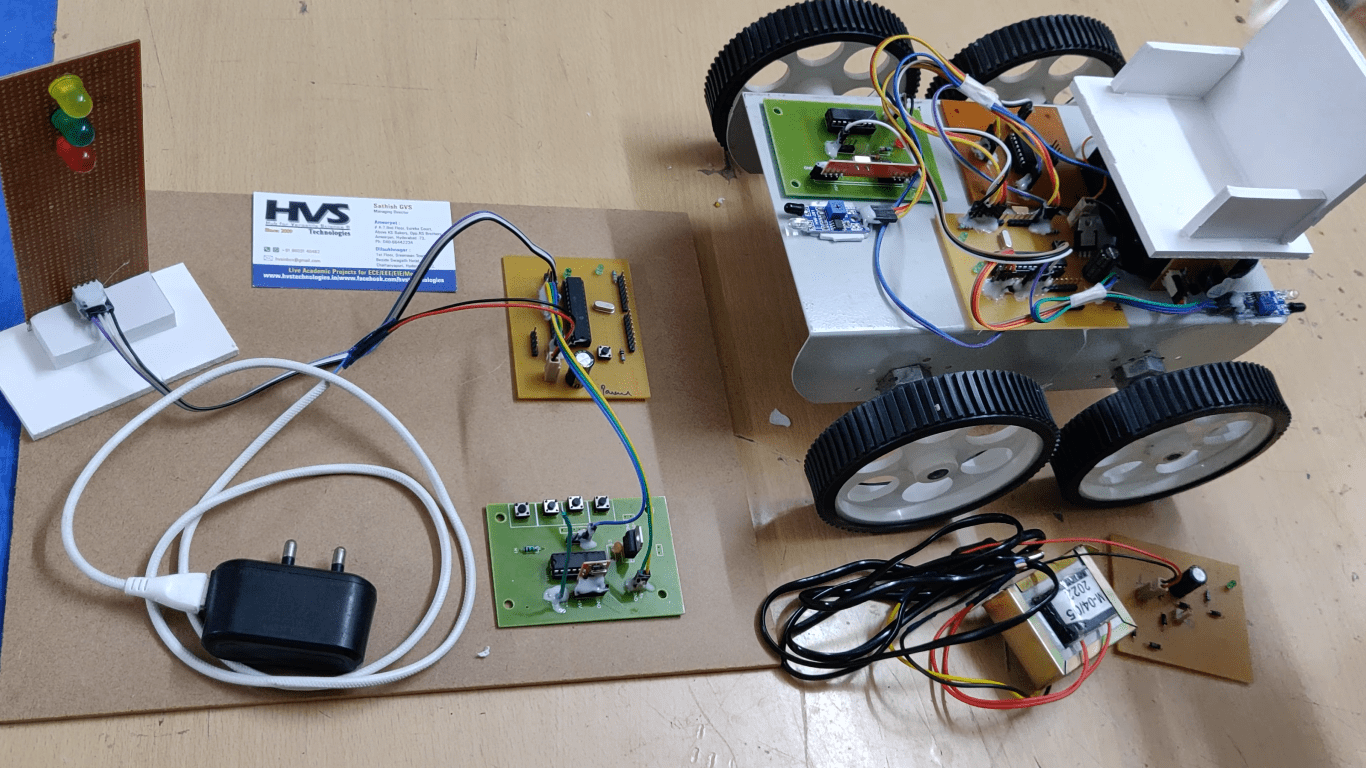
The aim of this research was to develop a portable pedestrian crossing aid robot for physically challenged and blind persons. This crossing aid device performs two important tasks: one is to detect pedestrian signals and another is to generate appropriate responses according to light status.
The robot will start when the green signal is turn on and if there is a person on the robot.
This system uses RF technology to know the status of traffic signal. Weight switch is uses to detect the person whether the person is on the robot or not. Two IR sensors are uses to detect the obstacles at font and back side of the robot.
RF Communication ranges in between 30 KHz to 300 GHz. RF communication works by creating electromagnetic waves at a source and being able to pick up those electromagnetic waves at a particular destination. These electromagnetic waves travel through the air at near the speed of light. The wavelength of an electromagnetic signal is inversely proportional to the frequency; the higher the frequency, the shorter the wavelength.
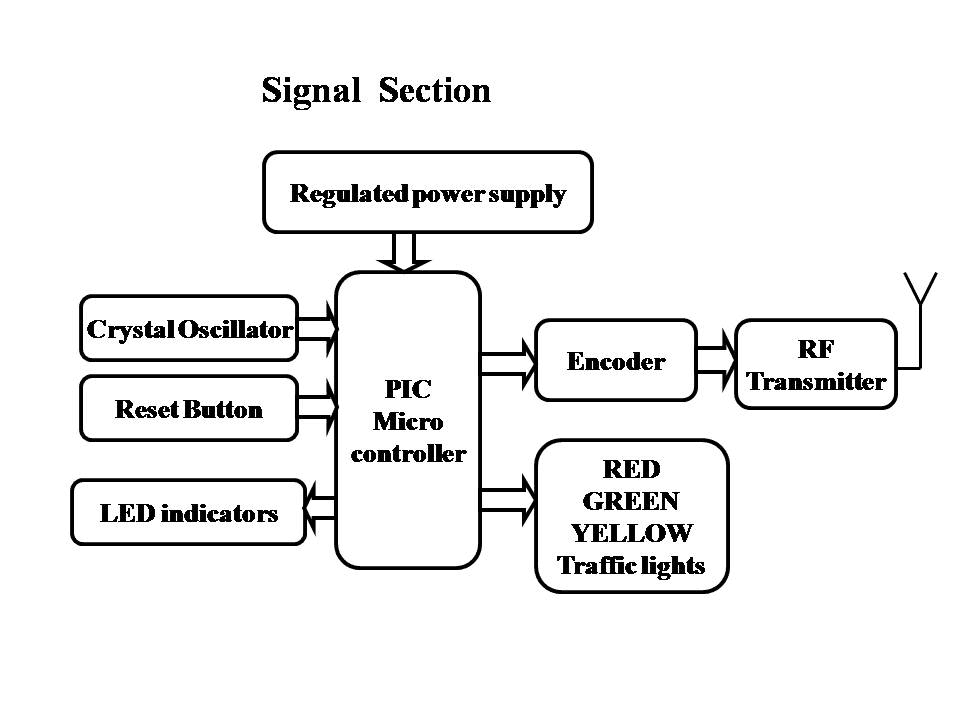
The controlling device of the whole system is a Microcontroller. The Microcontroller gets the input from traffic signals and send this data to the robot though RF transmitter.
This data received by RF receiver and process this data to the microcontroller and then microcontroller will check the signal whether it is green or red. If the signal is green then the microcontroller will check the person is on robot or not through weight switch.
These both conditions are satisfied then microcontroller will start the robot to cross the road along with obstacle detection. The microcontroller loaded program written in embedded C language.
The objectives of the project include:
 Block diagram:
video:
Block diagram:
video:
- Design a road crossing robot.
- Using RF wireless technology.
- Obstacle/object presence detection using IR sensor
- RF technology.
- Interfacing RF modules to Microcontroller
- DC motor working and need for motor driver.
- Interfacing IR sensors to microcontroller.
- Working about Traffic Signals.
- Embedded C programming.
- PCB designing.
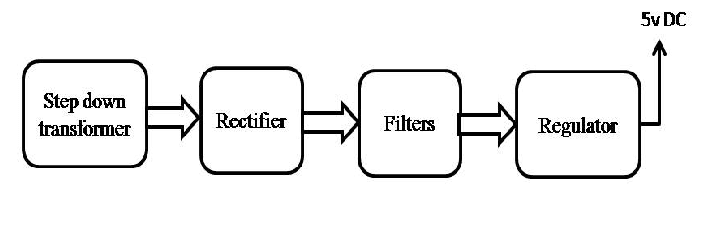
- Regulated Power Supply
- RF Transmitter.
- RF Receiver.
- PIC Micro Controller
- DC Motor with l293d motor driver.
- Two IR sensors.
- Reset Button.
- Crystal oscillator.
- LED indicators.
- PIC-C compiler for Embedded C programming.
- PIC kit 2 programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
 Block diagram:
Block diagram:
 video:
video: