No products in the cart.



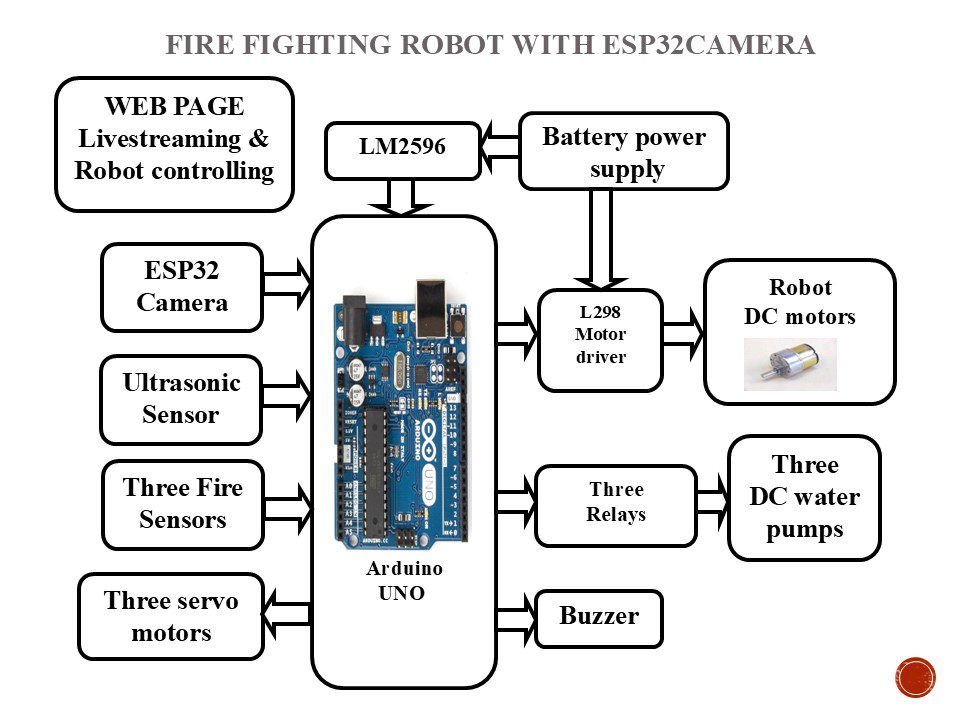
Fire accidents in homes, industries, and public places can cause severe damage to life and property. To reduce the risk and improve safety, a Fire Fighting Robot with ESP32 Camera is developed to detect and extinguish fire remotely while providing live video monitoring. The system is designed using an Arduino Uno as the main controller and an ESP32‑CAM for real-time video streaming.
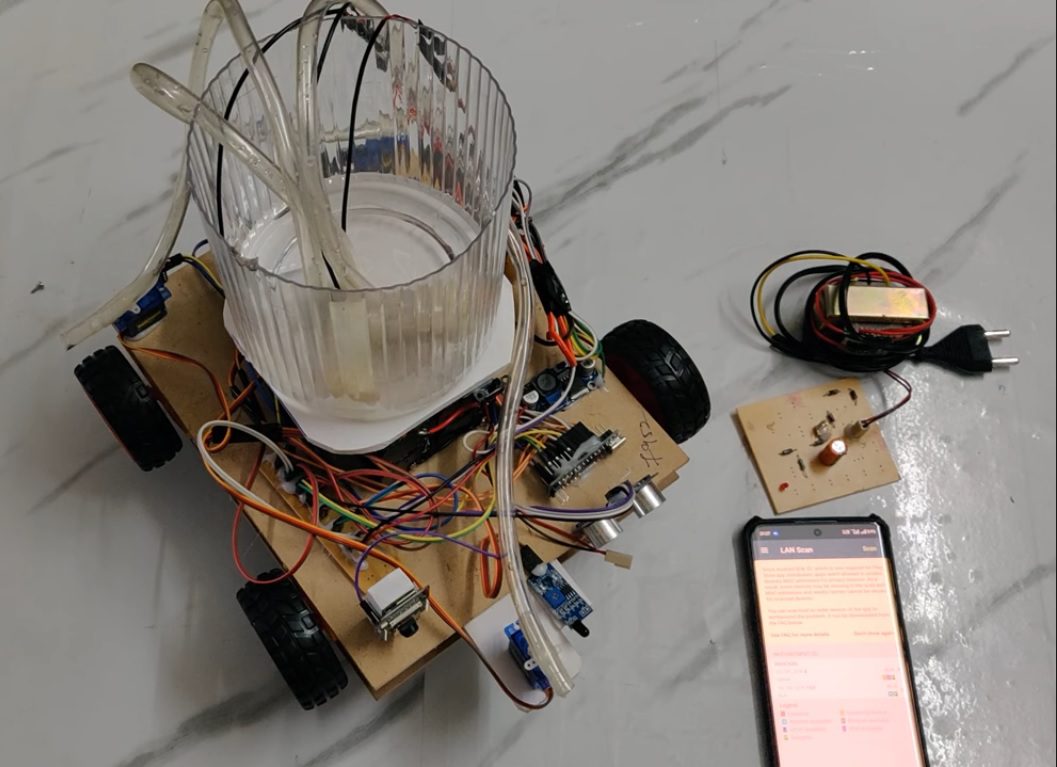
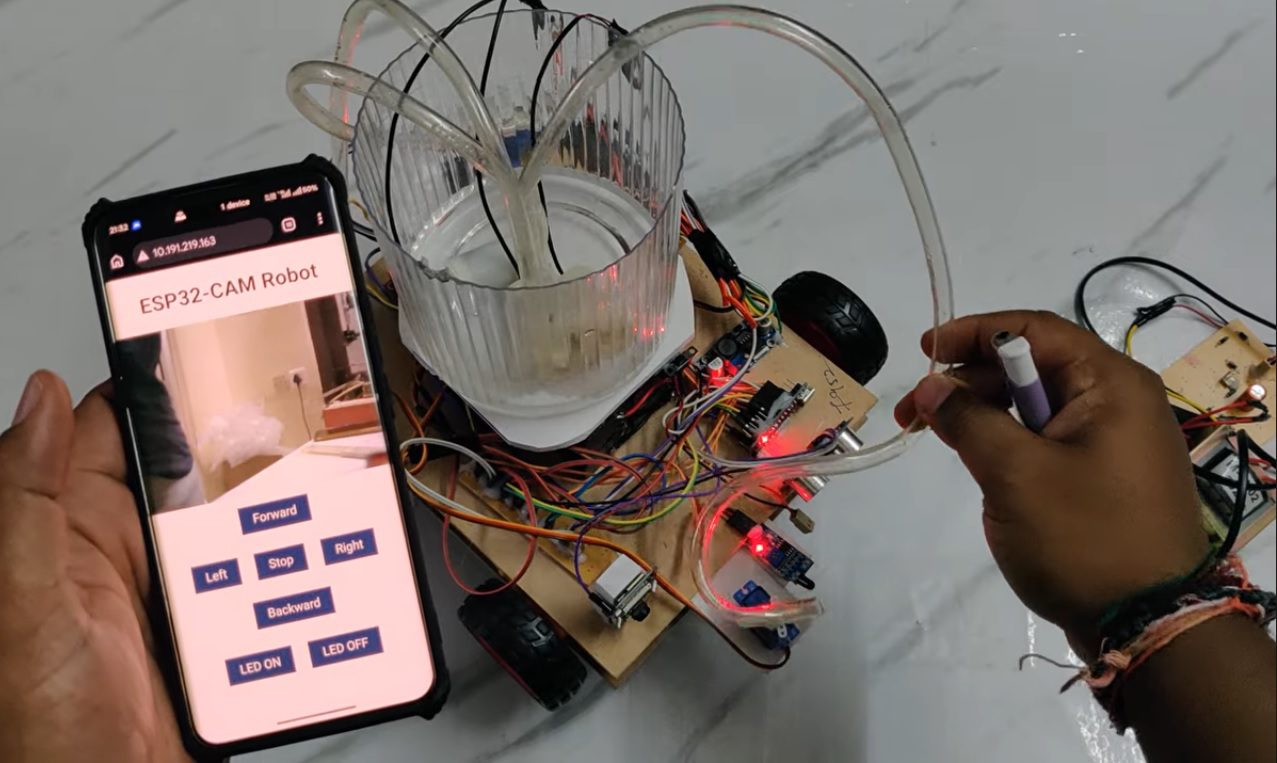
The robot is equipped with three flame sensors placed at the front, left, and right sides to detect fire in different directions. When a flame is detected, the controller activates the corresponding relay module to switch on the DC water pump located on that side, enabling quick fire suppression. An Ultrasonic Sensor HC‑SR04 is mounted on the front side of the robot to detect obstacles and help in safe navigation.
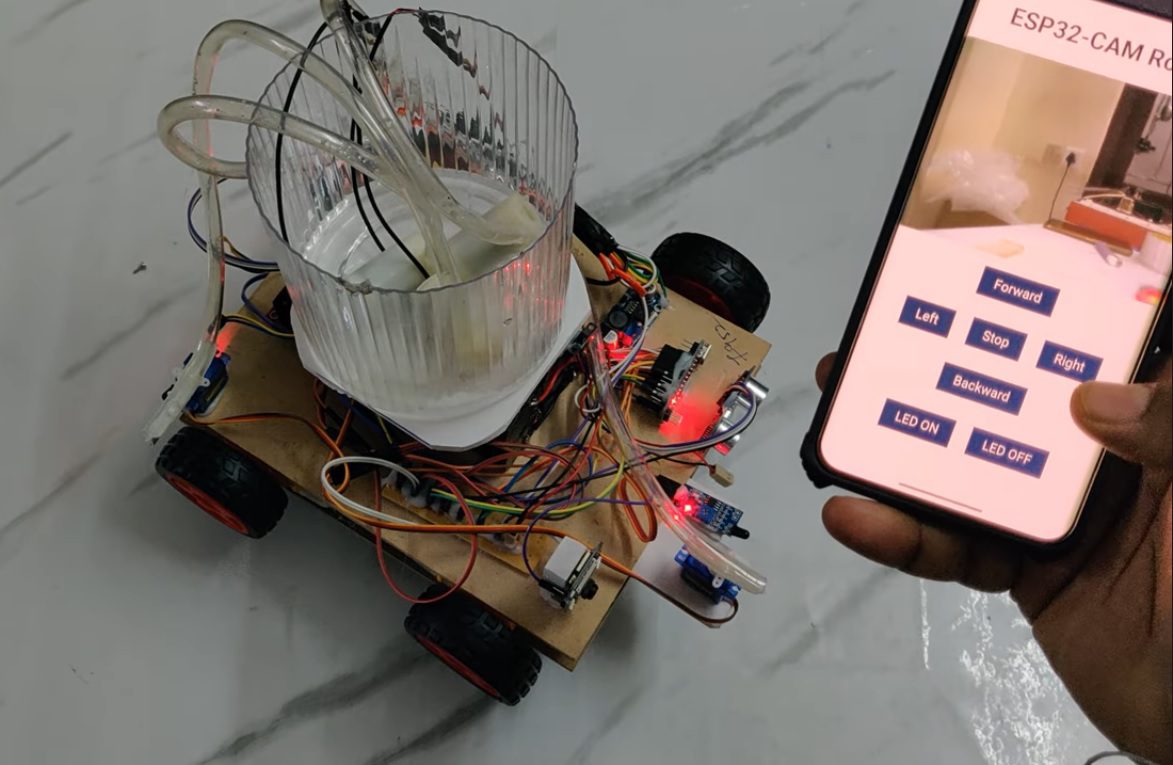
The robot movement is controlled using DC motors driven by the L293D Motor Driver IC, allowing the robot to move forward, backward, left, and right. Three servo motors are used for directional positioning of the firefighting mechanism. The ESP32-CAM streams live video to a web page, allowing the user to monitor the environment and control the robot remotely through a mobile browser. A buzzer is also included to provide an audible alert when fire is detected.
This system provides a low-cost, efficient, and remotely controlled fire detection and suppression solution, reducing human risk in dangerous environments. The project demonstrates how IoT and robotics can be integrated to improve fire safety and emergency response systems.
Objectives:
 video:
video:
To design and develop a mobile firefighting robot capable of detecting and extinguishing fire in hazardous environments.
To detect fire using multiple flame sensors placed at the front, left, and right sides of the robot for faster fire identification.
To control the robot remotely through a web browser using the live video streaming from the ESP32-CAM.
To provide real-time video monitoring so that the user can observe the surroundings and guide the robot safely.
To control robot movement using DC motors through the L293D Motor Driver IC for forward, backward, left, and right motion.
To automatically activate water pumps using relays when fire is detected by the flame sensors.
To detect obstacles using an ultrasonic sensor such as the HC‑SR04 Ultrasonic Sensor to avoid collisions.
To provide an audible alert using a buzzer to warn nearby people when fire is detected.
To develop a low-cost and efficient firefighting system that can reduce human risk in dangerous fire situations.
The Major Building Blocks for This Project:- Rechargeable Battery
- LM2596 Buck converter.
- Arduino uno
- Three Fire Sensors
- Buzzer
- ESP32CAM
- Dc motors with L293d
- Three Relays
- Three Servo motors
- Three Water motors.
 video:
video:







