HVS-5005. IoT based Stepper Motor Controlling for Robotic Application.
₹4,000.00
This project focuses on developing an IoT based stepper motor control system for robotic applications using NodeMCU (ESP8266) and a stepper motor driver module.
This project focuses on developing an IoT based stepper motor control system for robotic applications using NodeMCU (ESP8266) and a stepper motor driver module. Stepper motors are widely used in robotics because of their high precision, accurate positioning, and reliable speed control. In this system, NodeMCU connects to a Wi-Fi network and works as a web server, allowing the user to control the stepper motor using a web browser from a mobile phone or laptop. The user can perform operations such as start/stop, clockwise and anti-clockwise rotation, and speed control through the web interface. This method reduces manual effort and provides flexible remote access for motor operation. The proposed system is low-cost, efficient, and suitable for applications like robotic arms, automated positioning systems, CNC machines, and industrial automation.
Objectives:
To design and implement an IoT based stepper motor control system for robotic applications.
To enable wireless control of stepper motor using a web browser through Wi-Fi.
To control the direction of rotation (Clockwise / Anti-clockwise).
To control motor speed by varying step pulses.
To provide Start/Stop operation through the web interface.
To interface NodeMCU (ESP8266) with a stepper motor driver module for efficient motor driving.
To develop a low-cost, user-friendly and reliable system for robotic motion and automation tasks.
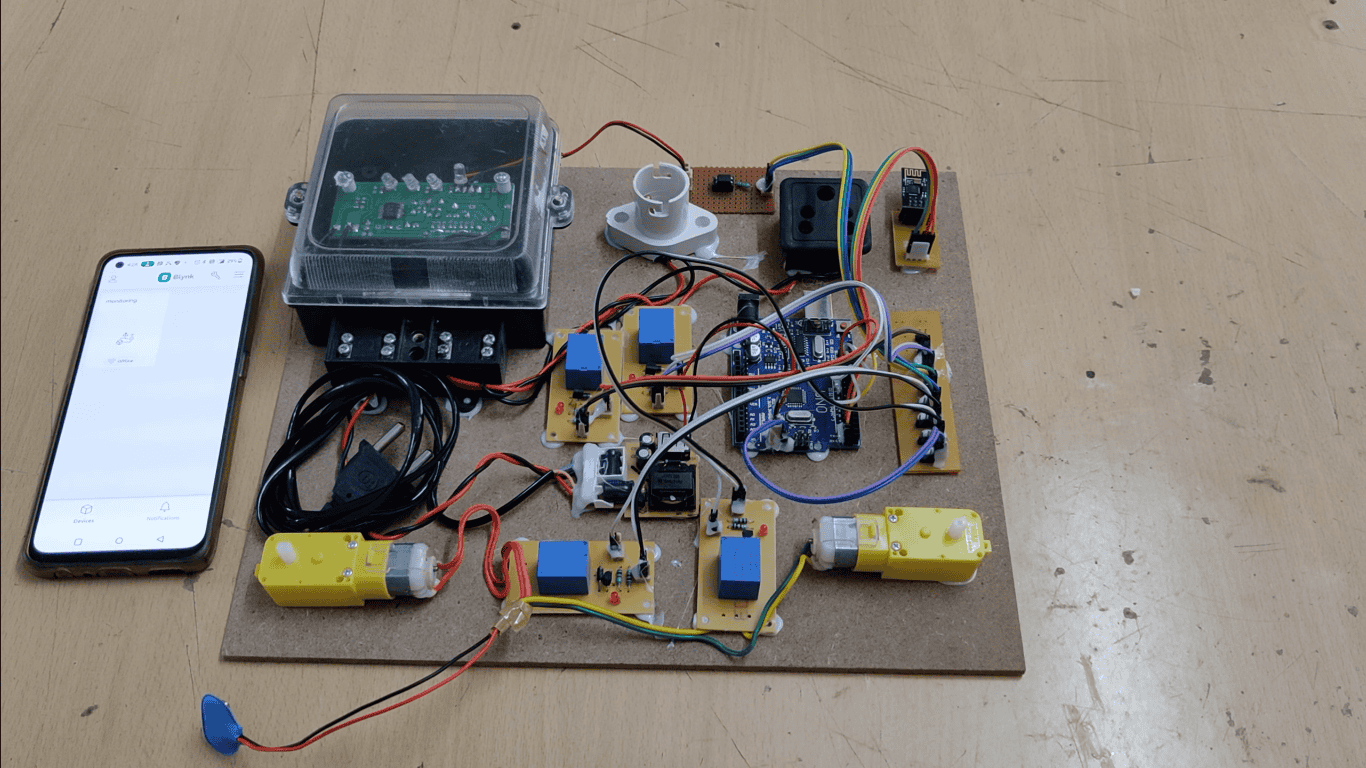
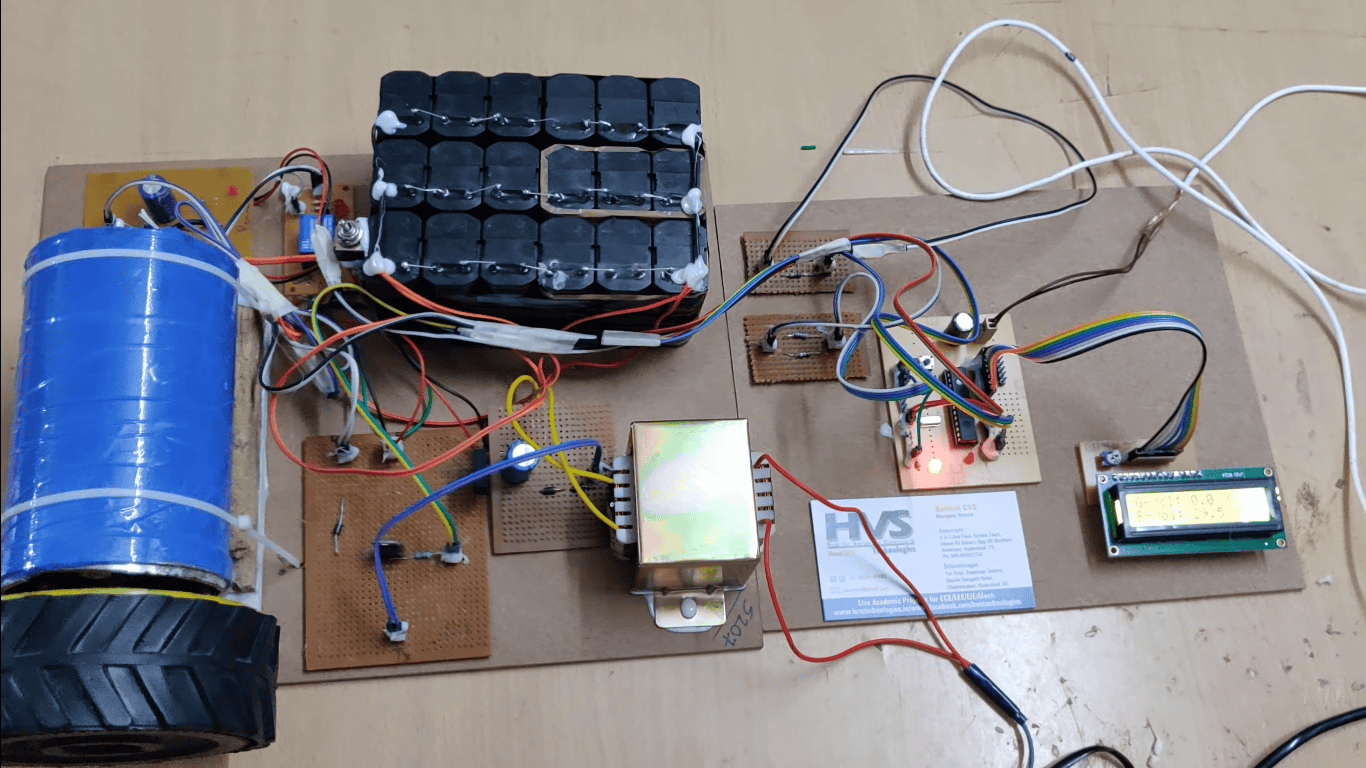
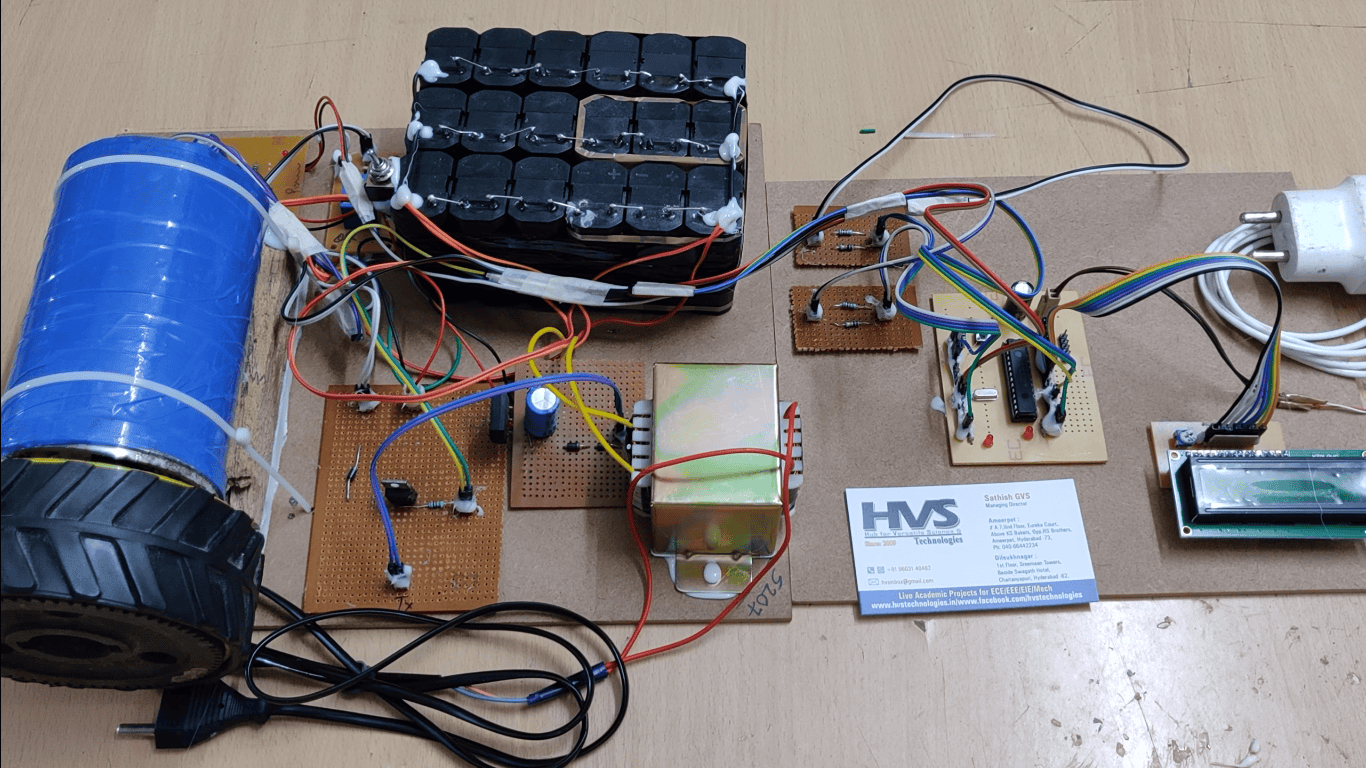
The main building blocks of the project are:
Regulated Power Supply.
NodeMCU.
Stepper motor with driver.
Software’s used:
Embedded C programming.
Arduino IDE for dumping code into Micro controller.