No products in the cart.



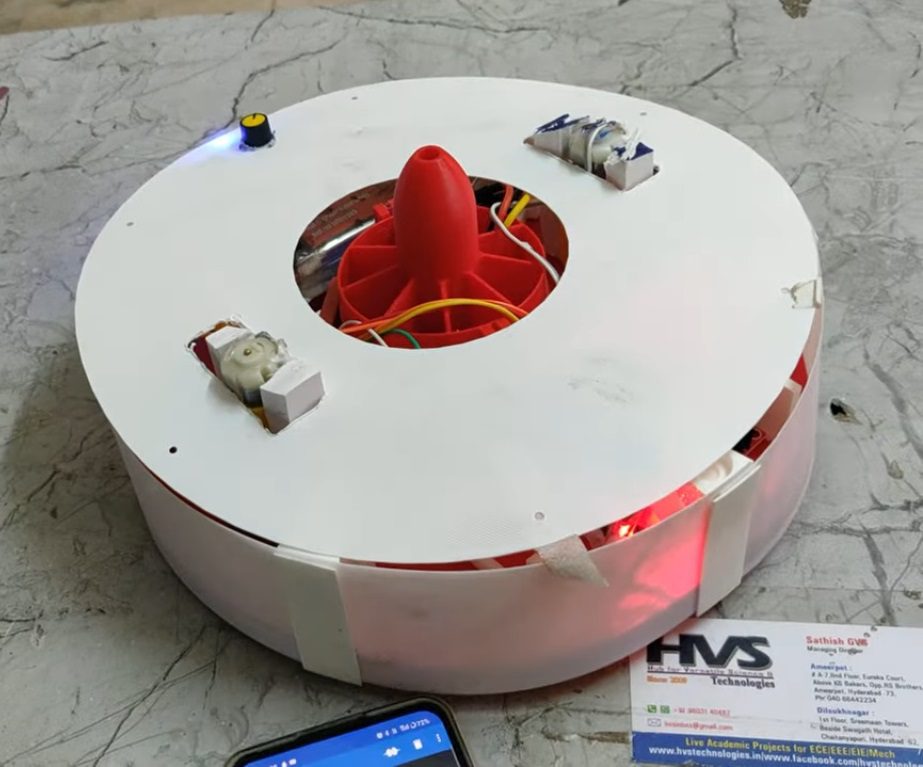


The purpose of wall climbing robots is climbing mainly on the vertical surfaces like that of walls. The robots arerequired to have high, maneuverability and robust & efficient attachment and detachment. The robot can automate tasks which aredone manually with an extra degreed of human safety in a cost-effective manner. The robot can move in all the four directionsforward, backward, left and right control by the user from Bluetooth using android mobile application. The other locomotion capabilities include linear movement, turning movement, lateral movement, rotating and rolling movement. Apart from the reliable attachment principal the robot should have low self weight and high payloadcapacity. The design and control of robot should be such that it can be operated from any place. A wireless communication linkissued for high performance robotic system. Regarding the adhesion to the surface the robots should be able to produce secure griping force using BLDC motor. The robots should adopt to different surface environments from steel, glass, ceramic, wood, concrete etc. with low energy Consumption and cost.
 video:
video:
Objectives
- To design and develop a wall-climbing robot capable of moving on vertical surfaces.
- To control the robot wirelessly using Bluetooth and an Android mobile application.
- To enable movement in four directions: forward, backward, left, and right.
- To provide strong adhesion to walls using a DC motor-based gripping mechanism.
- To operate on different surfaces such as glass, steel, wood, ceramic, and concrete.
- To reduce human effort and improve safety in wall inspection and maintenance tasks.
- To achieve low power consumption with efficient performance.
- To develop a compact, lightweight, and cost-effective robotic system.
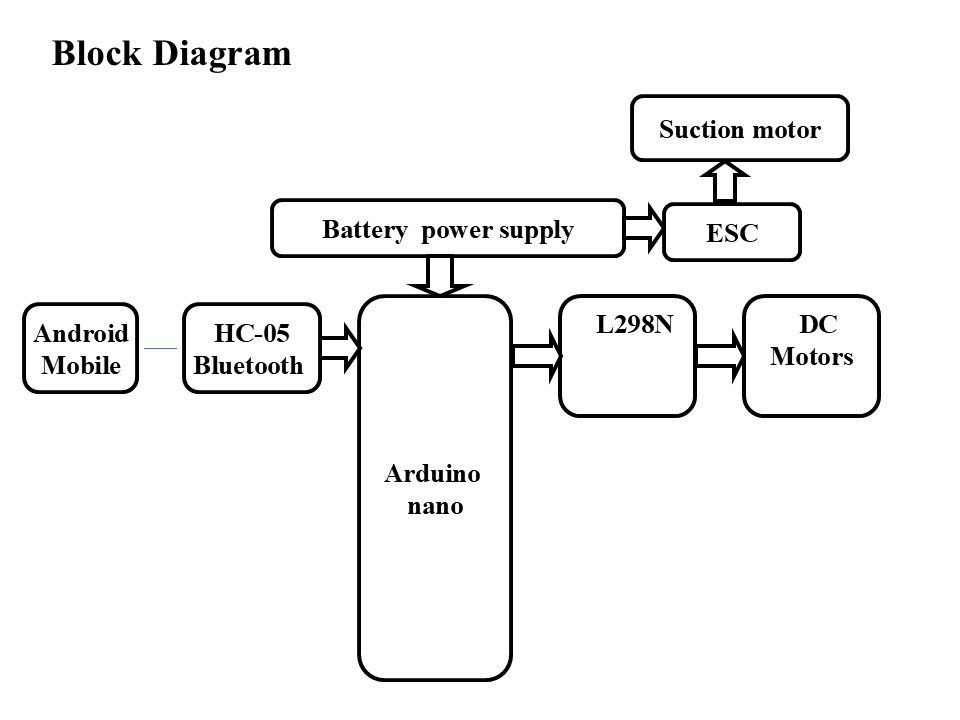
- ARDUINO NANO Microcontroller
- Battery power supply
- HC-05 Bluetooth.
- L298N diver with two DC motors.
- Suction motor.
- Arduino IDE studio compiler for dumping code into Microcontroller.
- Express SCH for Circuit design.
- Embedded C language.
 video:
video: