No products in the cart.


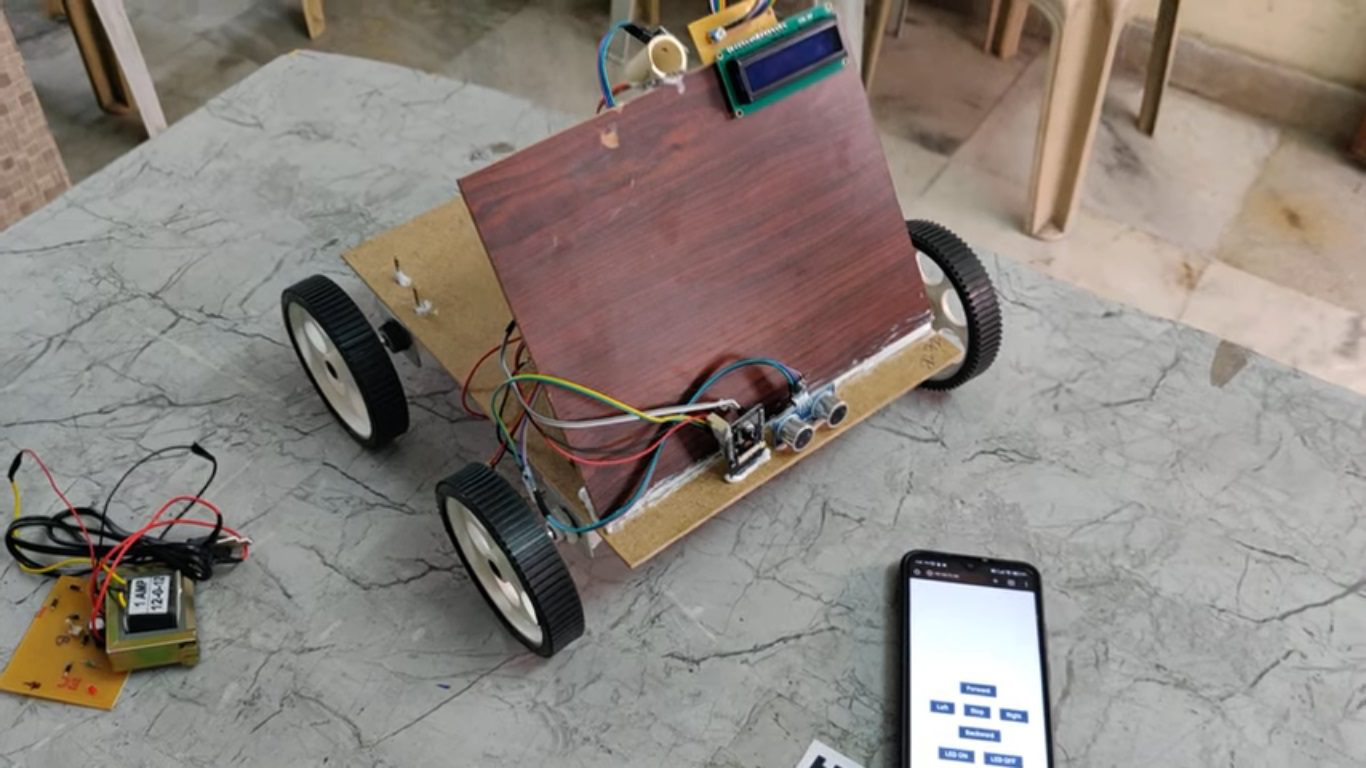

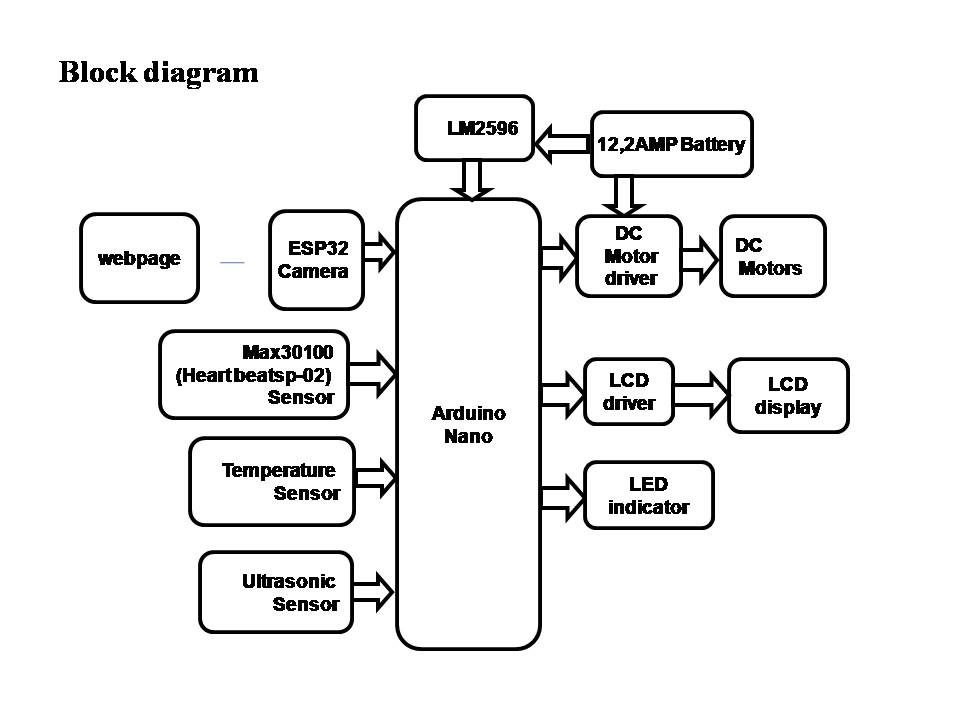
The Virtual Doctor Robot is an IoT-based healthcare monitoring and navigation system designed to assist patients and individuals in remote health tracking. The robot integrates an ESP32 camera for live streaming, multiple health sensors (MAX30100 for heart rate and SpO2, a temperature sensor, and an ultrasonic sensor for obstacle detection), and an Arduino Nano for real-time data processing.
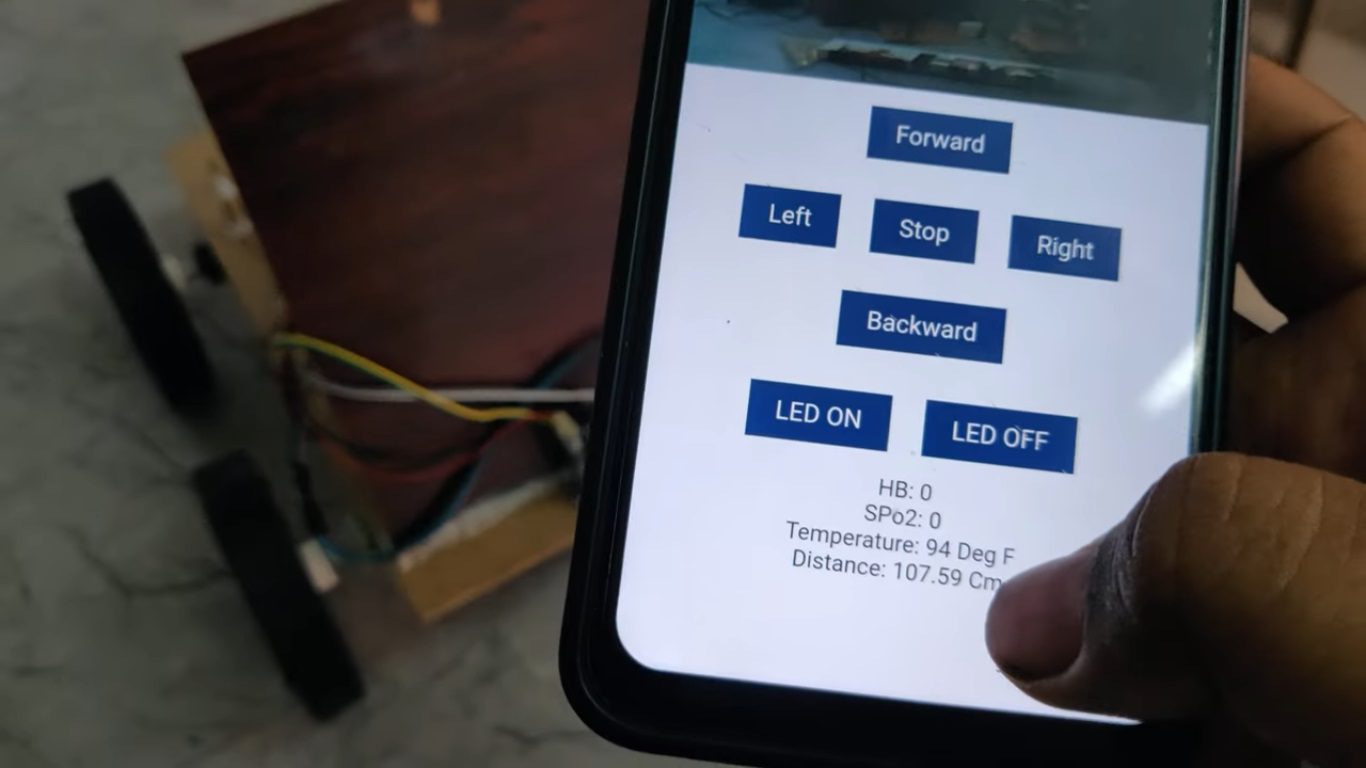
Users can view the live feed of the robot and control its movement remotely via a web-based interface. If an obstacle is detected, the robot halts automatically to prevent collisions, ensuring safe movement in its environment.
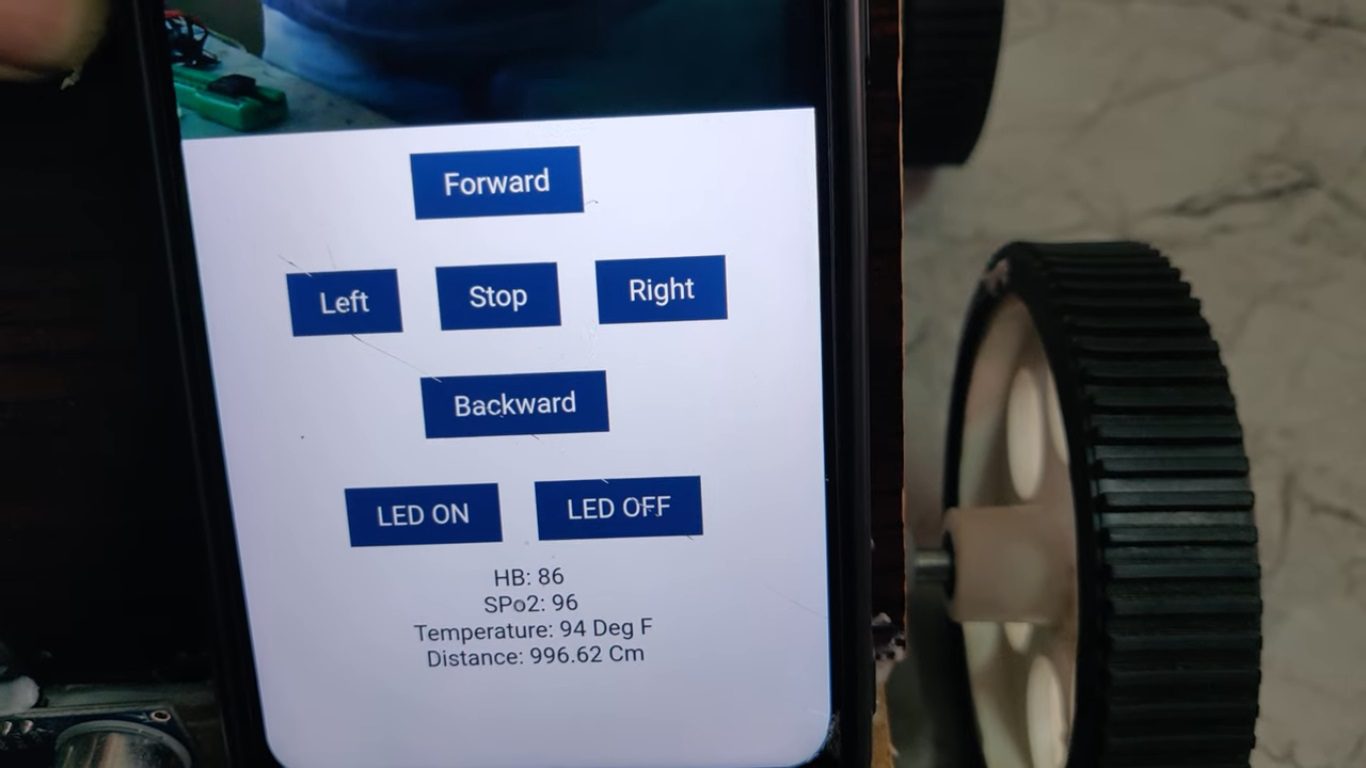
Before measuring health parameters, the robot displays a message: "PLACE THE FINGER" on its screen. Only after the patient places their finger on the sensor, the robot begins reading the heart rate, SpO2 levels, and temperature. The measured data is then displayed on the LCD and uploaded to the web browser for remote monitoring by doctors and caregivers.
The system is powered by a 12.2Ah battery, regulated through an LM2596 module, and employs a DC motor driver for controlled movement. A display module provides real-time feedback, while an LED indicator signals critical alerts. This project enhances remote patient monitoring and autonomous navigation, reducing the need for physical consultations while ensuring a safer and more efficient healthcare solution.
Objectives of the project:
 video:
video:
- Live Streaming & Remote Control – Enable users to view live video from the robot and control its movement via a web-based interface.
- Health Monitoring – Measure heart rate, SpO2, and temperature using sensors and display the data on an LCD screen and web browser.
- User Interaction – Display a message "PLACE THE FINGER" before starting health measurements to guide the patient.
- Automatic Obstacle Detection – Stop the robot automatically if an obstacle is detected to ensure safe navigation.
- Data Transmission – Upload health data to a webpage for remote monitoring by doctors and caregivers.
- Power Management – Use a 12.2Ah battery with LM2596 to ensure stable power supply for all components.
- Battery power supply
- LM2596.
- ESP32 camera module.
- MAX30100SENSOR (heartbeat and spo2).
- Temperature Sensor.
- DC motors with L293d.
- Arduino nano.
- Ultrasonic sensor.
- LCD display.
- LED indications.
- Embedded C programming.
- Arduino IDE programmer for dumping code into Micro controller.
- Express SCH for Circuit design.
- IOT technology.
 video:
video:







