Subtotal ₹14,250.00


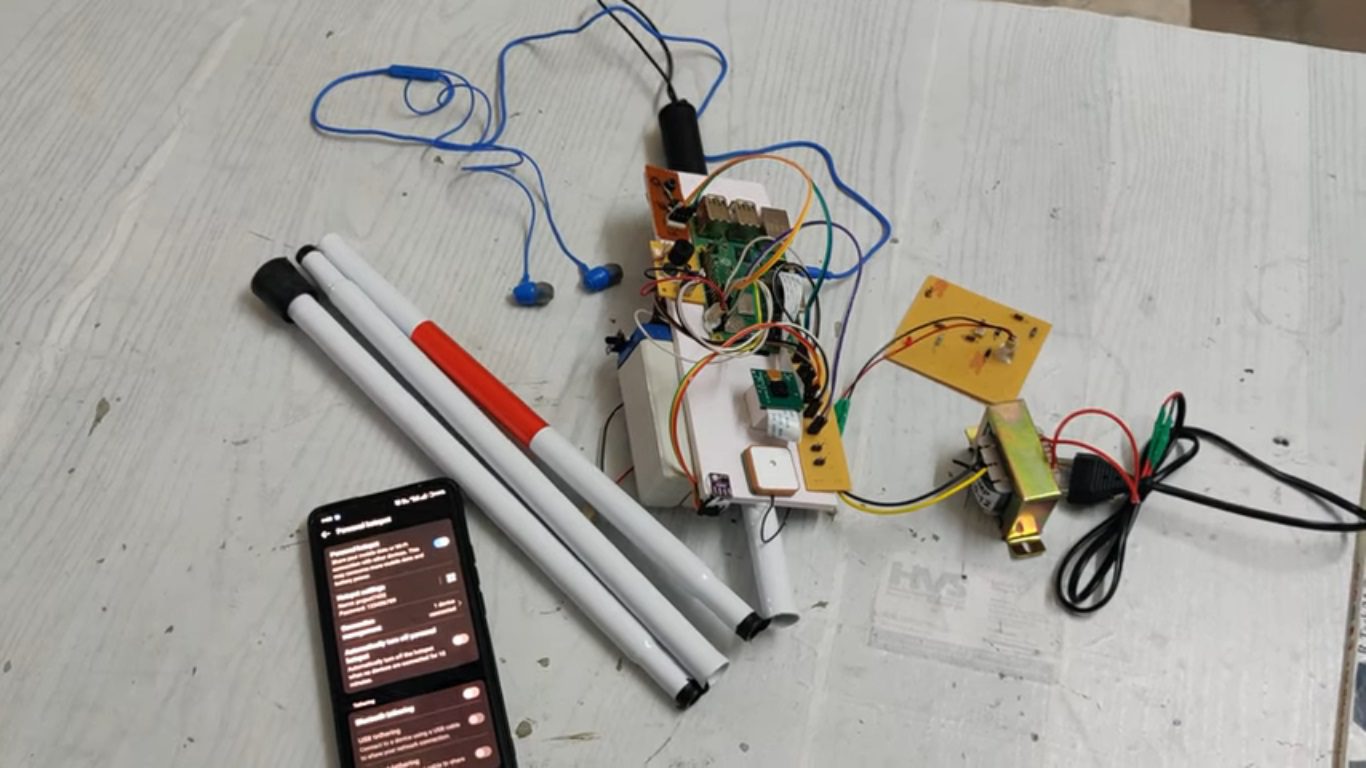


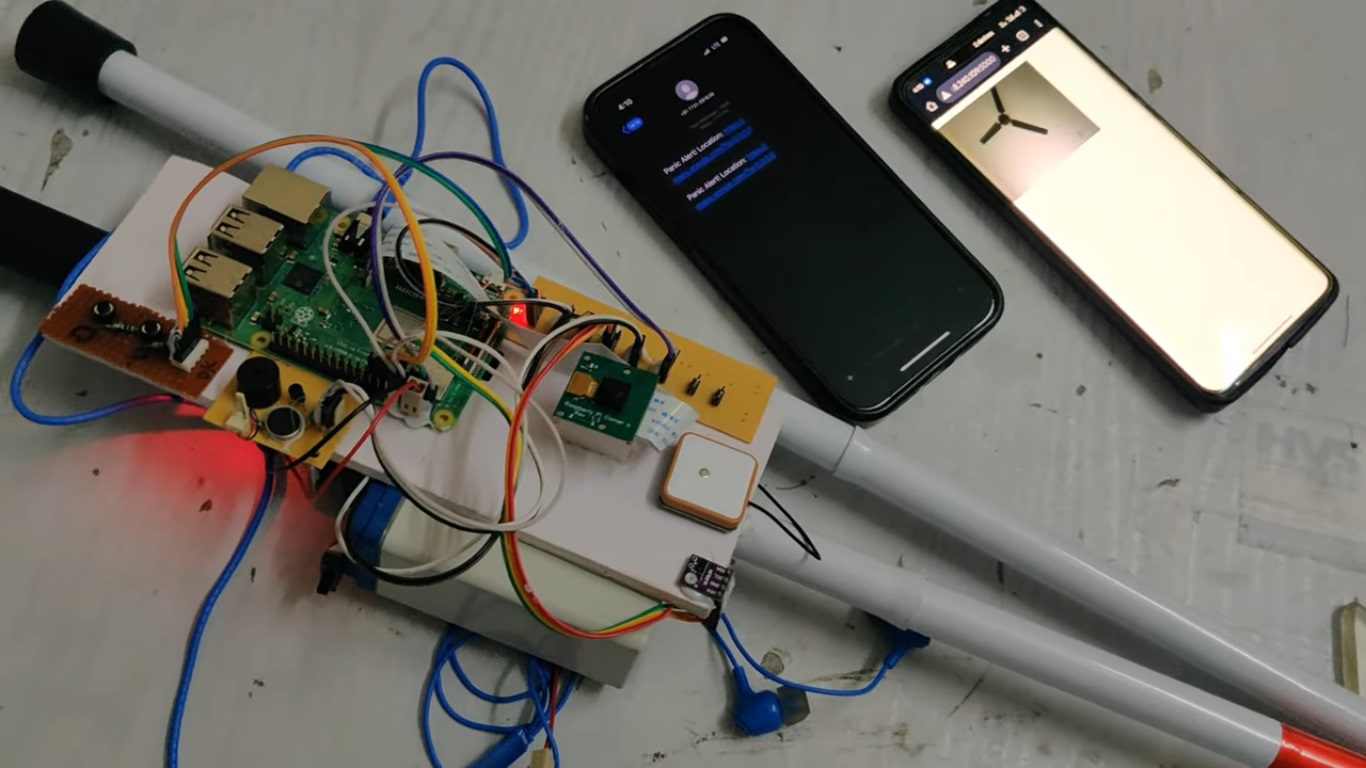
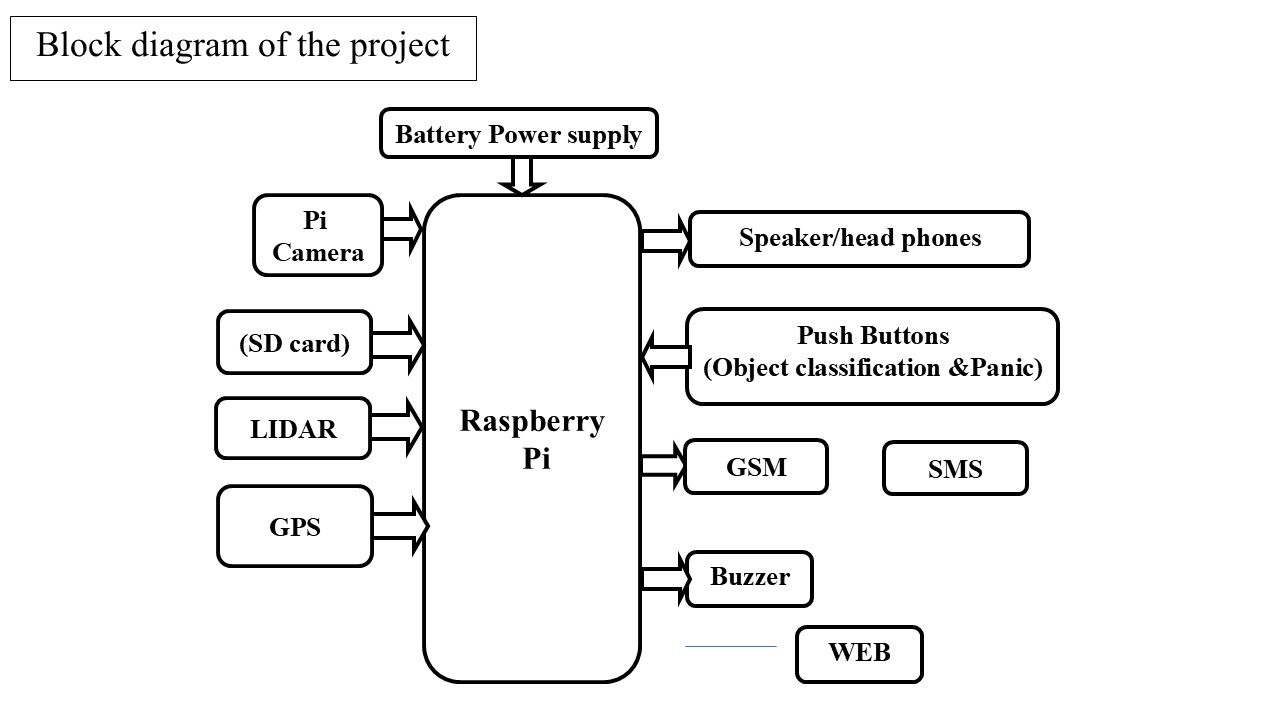
This project presents the design and development of a Smart Cane for Visually Impaired Individuals, integrating advanced technologies to enhance mobility, safety, and independence. The system uses a Raspberry Pi 3B+ as the core processing unit, interfaced with a Pi Camera, LIDAR sensor, GSM/GPS modules, and audio output devices. The primary functionality involves real-time object classification and obstacle detection, delivering essential environmental awareness to the user.
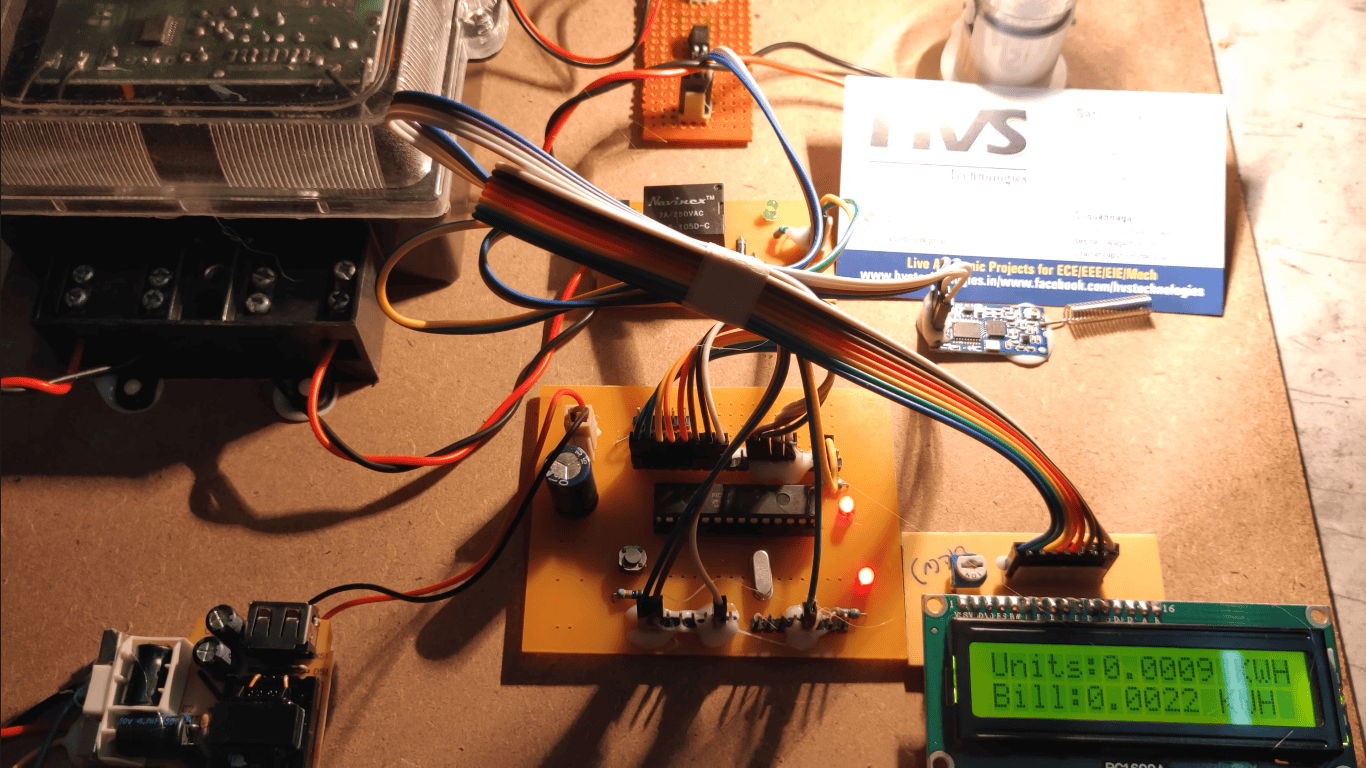
The Pi Camera continuously monitors the scene in front of the user. Upon pressing an input switch, it captures an image and classifies objects using trained machine learning models. These classifications, such as "chair" or "person," are announced through voice output via earphones, allowing the user to understand their surroundings non-visually. The LIDAR sensor is employed to detect obstacles within a 50 cm range, prompting vibration and audible alerts to prevent collisions.
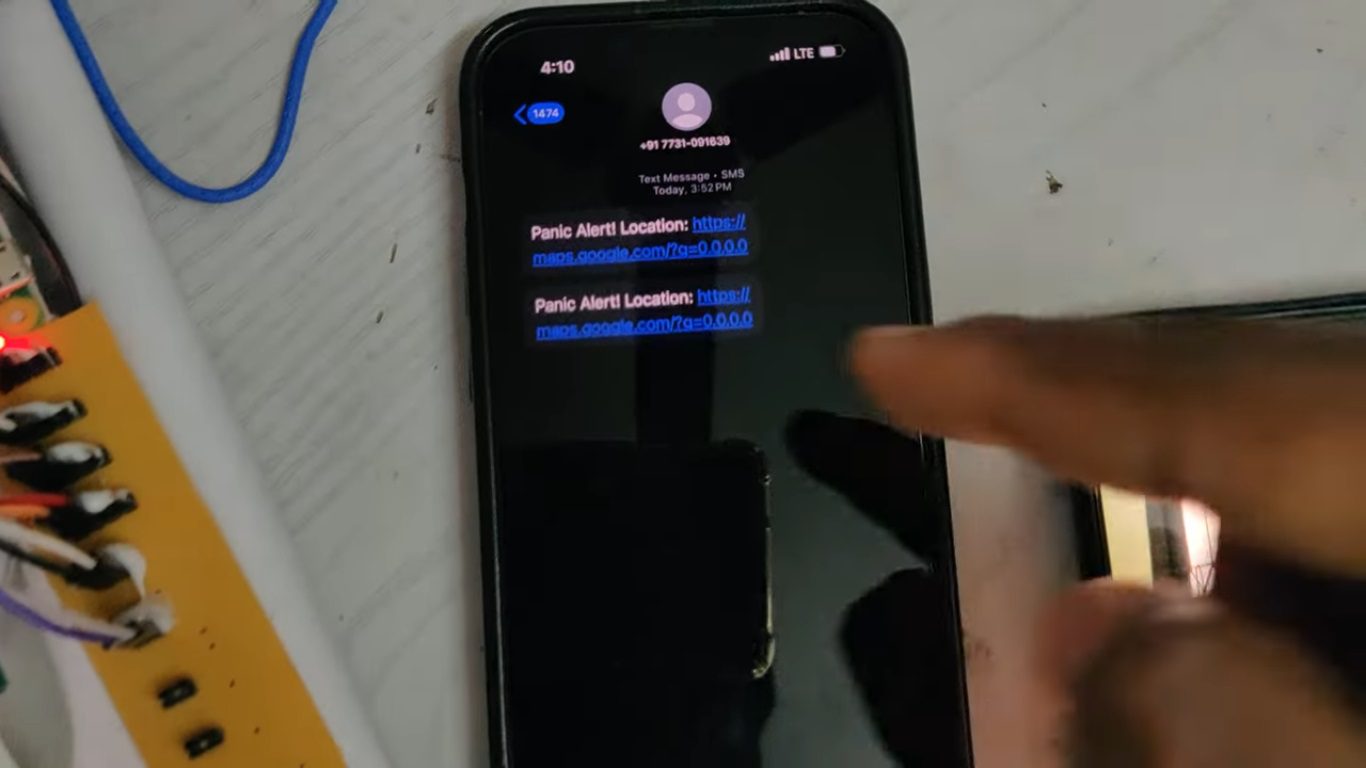
In emergencies, a dedicated panic switch can be activated to send an SMS alert with GPS coordinates to a registered phone number using the GSM module. This feature enhances personal safety by providing location-based assistance during critical situations. The system also includes a rechargeable battery pack managed by an LM2596 voltage regulator, ensuring stable 5V power distribution across all modules.
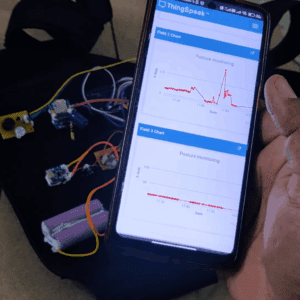
A supportive hotspot and mobile application (Network Analyzer) enable temporary video streaming and network diagnostics for setup and testing. Overall, the Smart Cane combines AI-based object recognition, real-time alerts, and communication technologies to deliver a comprehensive assistive solution tailored for the visually impaired, promoting confidence and autonomy in everyday navigation.
Objectives:
 video:
video:
- Detect obstacles using LIDAR and alert the user through sound and vibration.
- Classify objects in front using a Pi Camera and announce them via voice output.
- Provide real-time audio feedback through earphones for object identification.
- Enable emergency alert functionality via a panic switch.
- Send SMS alerts with GPS location to a registered phone number during emergencies.
- Ensure portable operation with a rechargeable battery and regulated power supply.
- Utilize Raspberry Pi as the central controller for processing and coordination.
- Offer basic mobile interface for testing object classification outputs.
- Power supply.
- Raspberry Pi3 b+ processor.
- Pi Camera.
- SD card.
- LIDAR Sensor.
- GSM Module .
- GPS Module.
- EARPHONES.
- Buzzer .
- Two Push Buttons.
- Rechargeable Battery.
- LM2596 Voltage Regulator.
- Embedded Linux programming.
- Express SCH for Circuit design.
- Python-tesseract is an optical character recognition (OCR).
 video:
video: