No products in the cart.




The Smart Green Ship Sensor-Based Stability and Safety Monitoring System with Integrated Oil Spill Collector is an intelligent, eco-friendly marine solution designed to enhance ship safety, stability, and environmental protection through real-time monitoring and automated control.
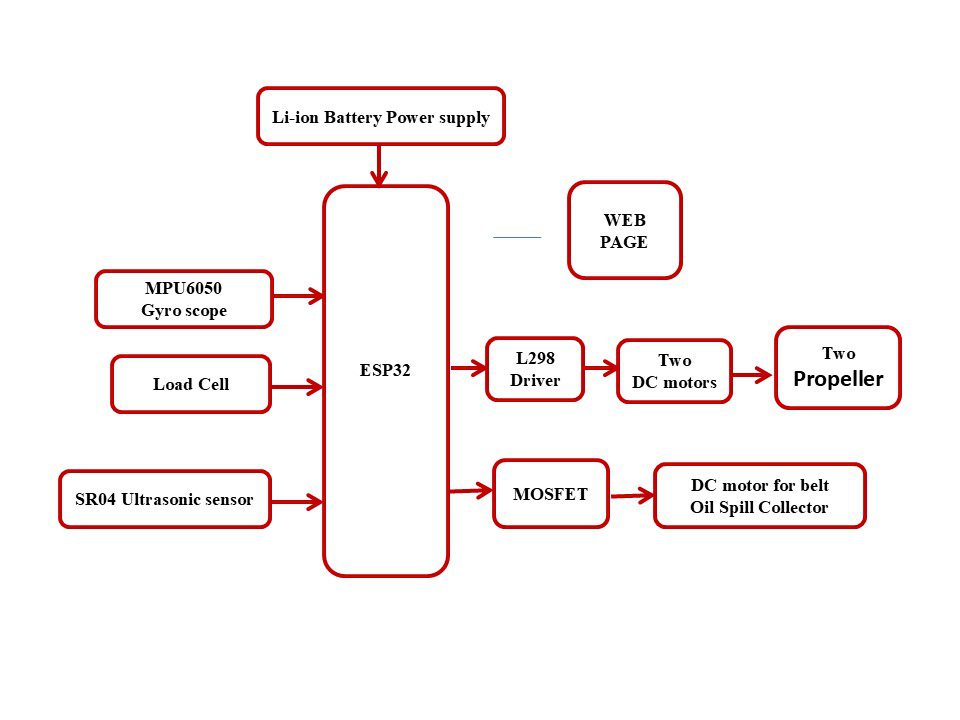
This system is built around an ESP32 microcontroller that continuously collects and processes data from multiple onboard sensors. An MPU6050 gyroscope monitors ship tilt and orientation across the X, Y, and Z axes to ensure stability during operation. A load cell measures weight variations to detect imbalance or overload conditions, while an ultrasonic sensor (SR04) identifies nearby obstacles to prevent collisions and ensure safe navigation.
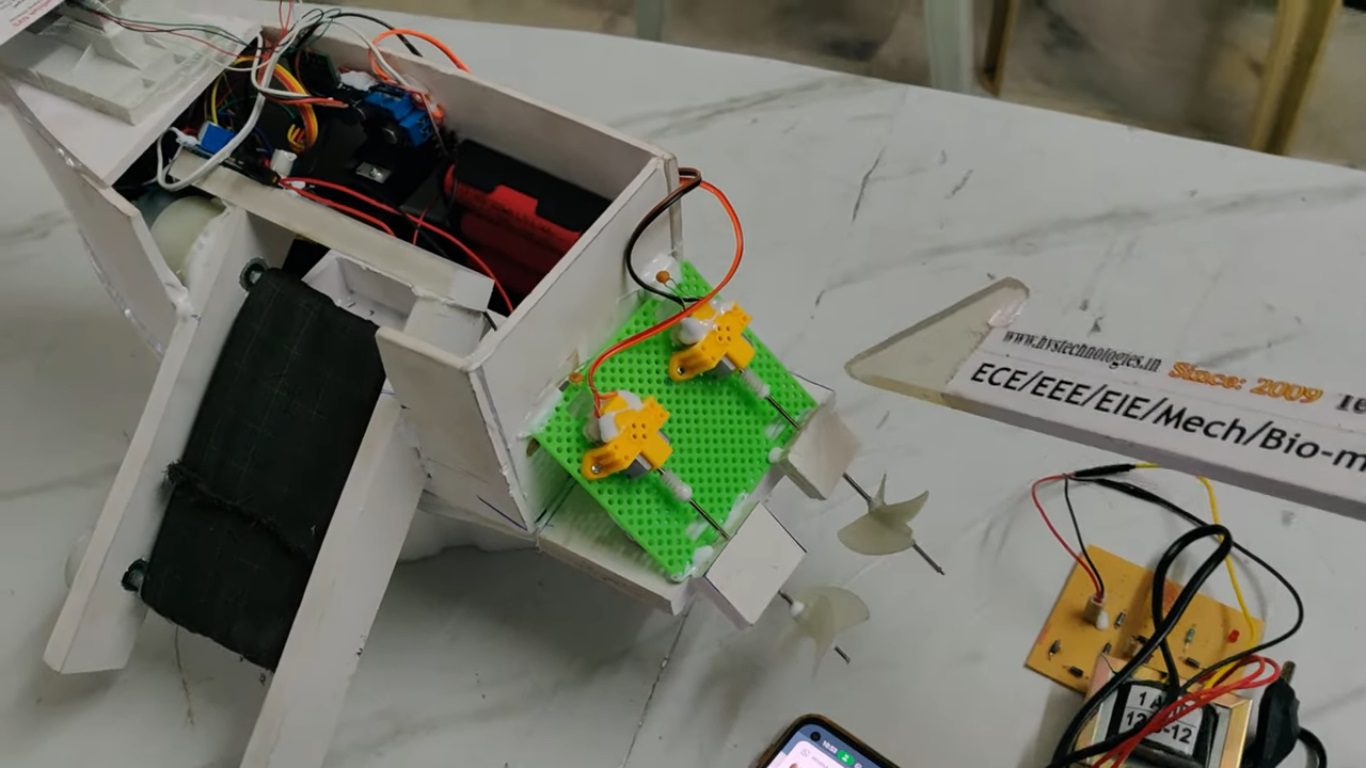
The ship’s propulsion is controlled using dual DC motors driven by an L298 motor driver, enabling directional movement via a web-based interface. Additionally, an oil spill collection mechanism is integrated using a belt-driven DC motor controlled through a MOSFET switching circuit. This allows remote activation of the oil collection belt to gather surface oil contaminants efficiently.
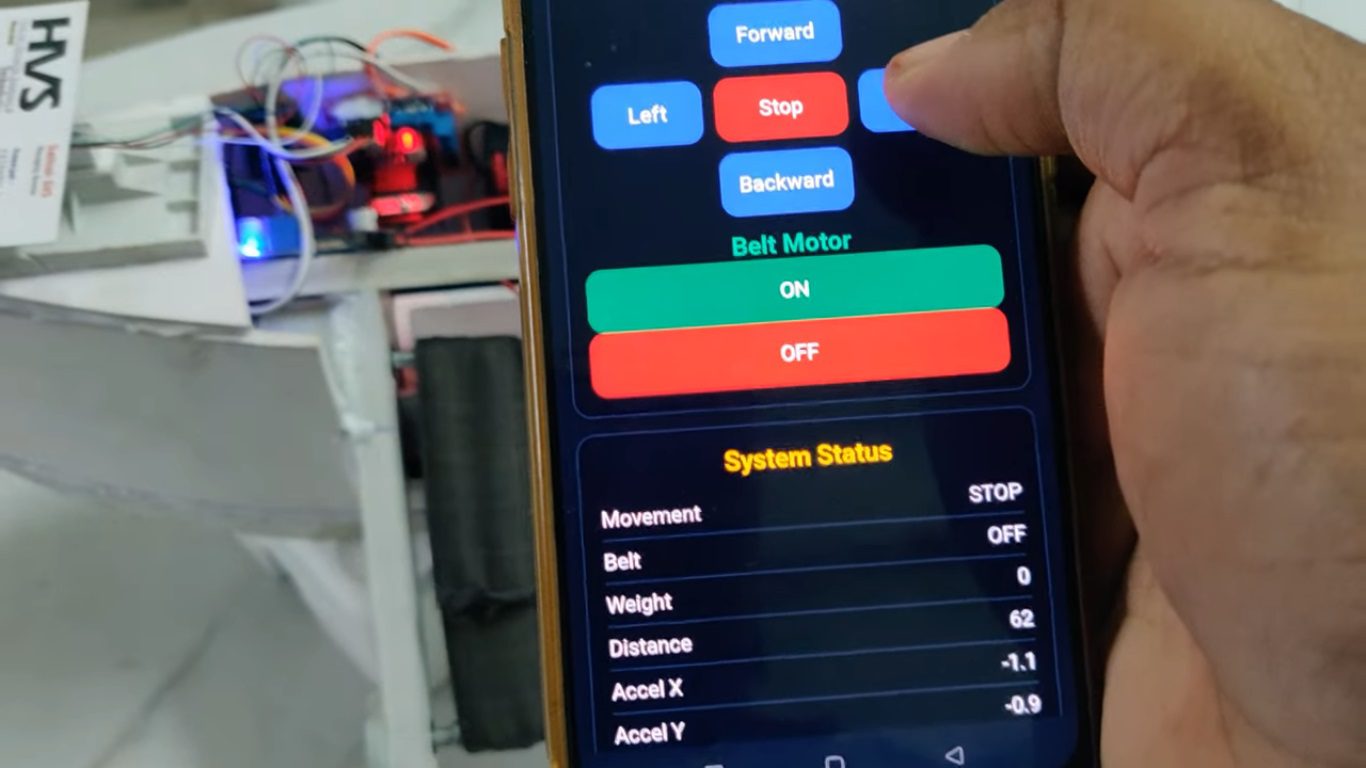
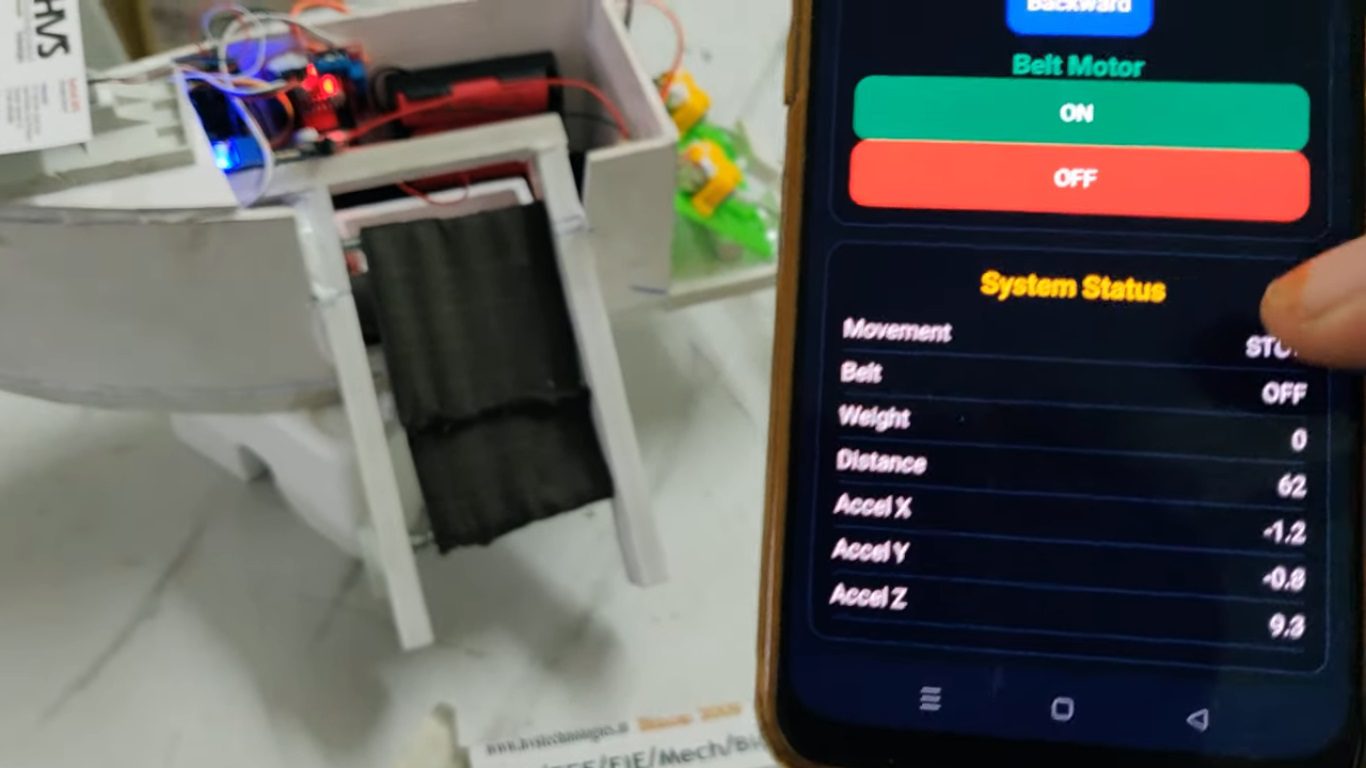
All critical parameters — including ship orientation, obstacle distance, load weight, propulsion movement, and oil belt status — are transmitted in real time to a web dashboard via ESP32 Wi-Fi connectivity. This enables remote monitoring and control of ship navigation and pollution management systems from any location.
Powered by a Li-ion battery system, the proposed design promotes sustainable marine operations by combining smart navigation safety with environmental cleanup functionality. The system provides a low-cost, scalable solution for future autonomous marine vessels focused on both operational safety and ecological preservation.
Objectives:
 video:
video:
To monitor ship stability in real-time: Using the MPU6050 gyroscope to measure tilt and orientation along X, Y, and Z axes to prevent imbalance and ensure safe navigation.
To detect obstacles and avoid collisions: By integrating an ultrasonic sensor (SR04) to measure the distance of nearby objects in the ship’s path.
To measure onboard load conditions: Using a load cell to monitor weight distribution and detect overload or imbalance situations.
To enable remote ship navigation: Controlling propulsion motors through a web-based interface using ESP32 Wi-Fi connectivity.
To integrate an automated oil spill collection system: Operating a belt-driven oil collector using a MOSFET-controlled DC motor.
To provide real-time web monitoring: Displaying ship tilt (XYZ axis), obstacle distance, load weight, movement status, and oil belt operation on a live dashboard.
To enhance marine safety: By continuously monitoring ship movement and environmental conditions.
To support environmental protection: Through efficient detection and collection of oil spills from water surfaces.
To develop a smart and energy-efficient system: Powered by a Li-ion battery for sustainable marine operations.
To create a low-cost IoT-based smart ship model: That combines safety monitoring with pollution control.
The major building blocks of this project are:- Li-ion Battery Power supply.
- ESP32.
- Ultrasonic sensor.
- Mpu6050 Gyro scope.
- Load cell.
- DC Motors with L298.
- DC motor for belt movement.
- ARDUINO IDE.
- Embedded C language.
- WEB Technology.
 video:
video: