No products in the cart.


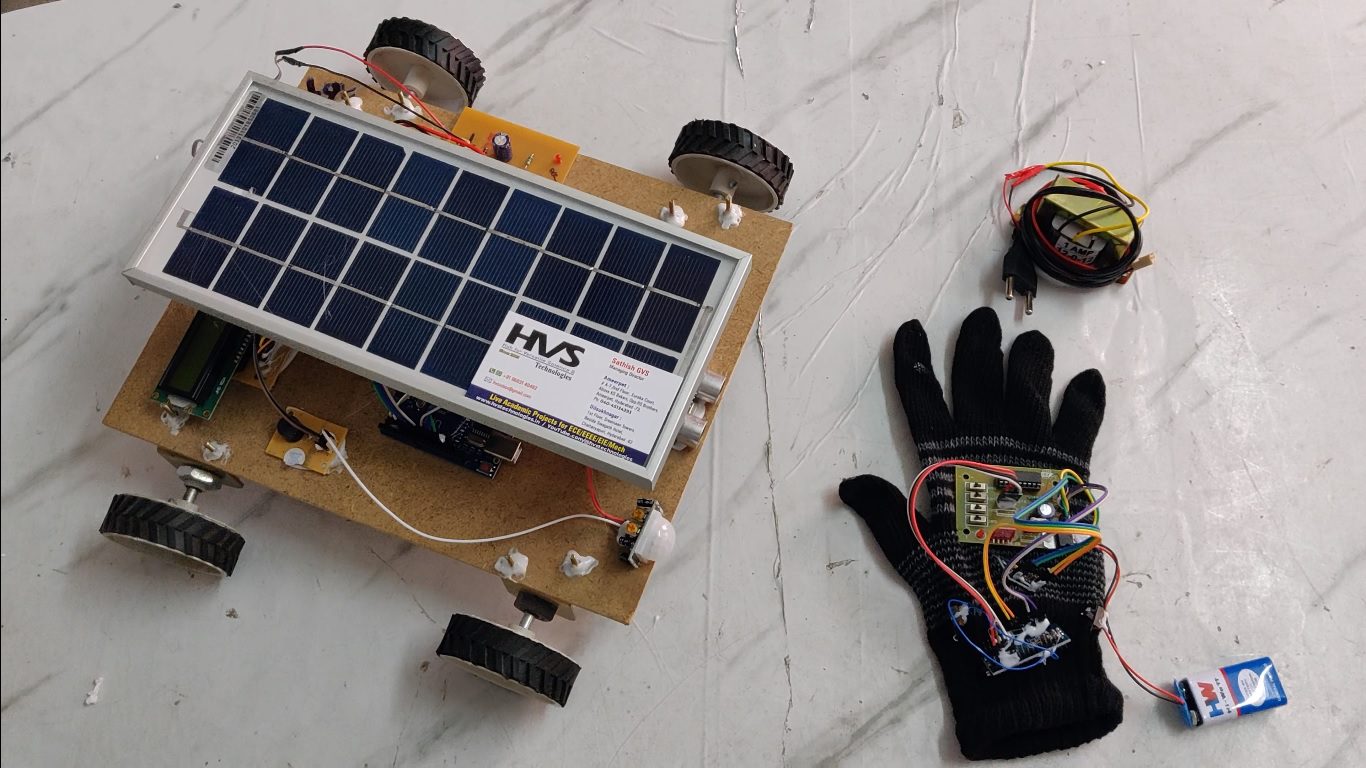
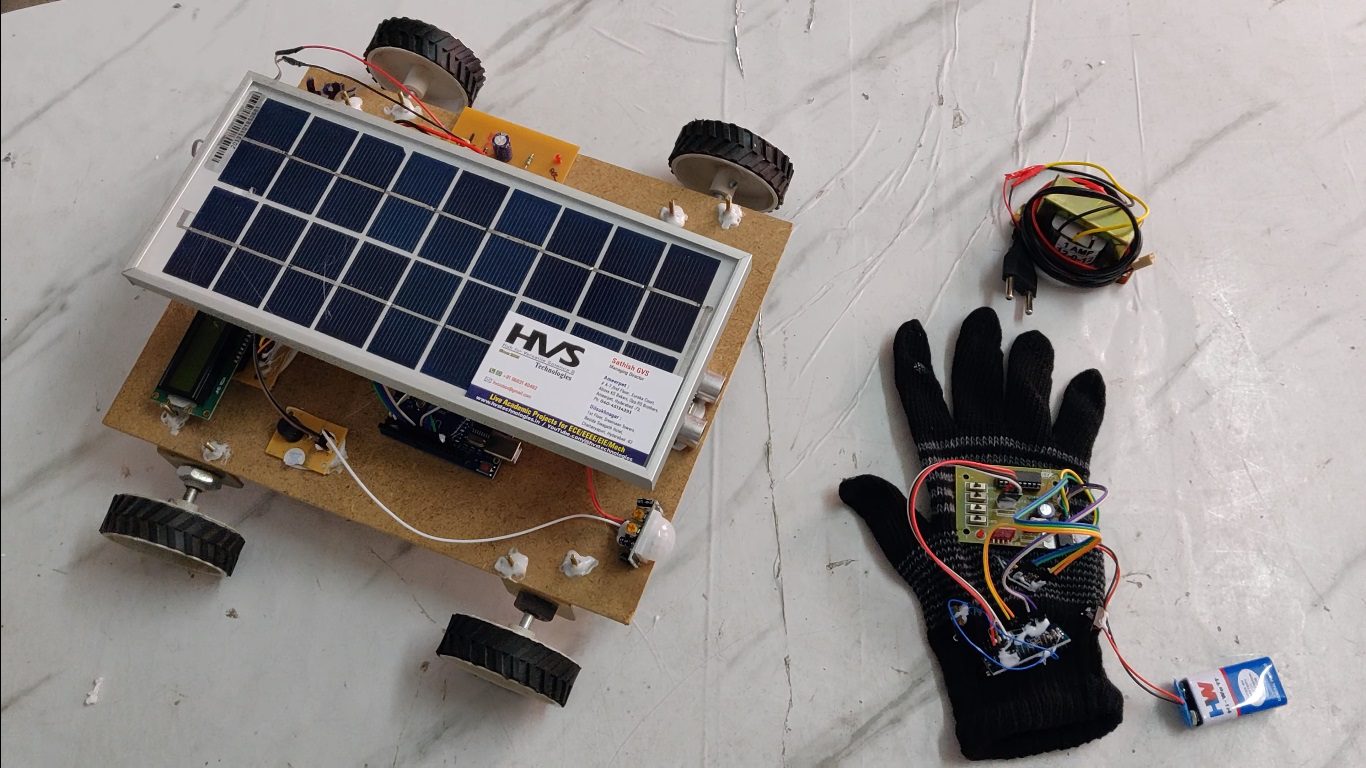
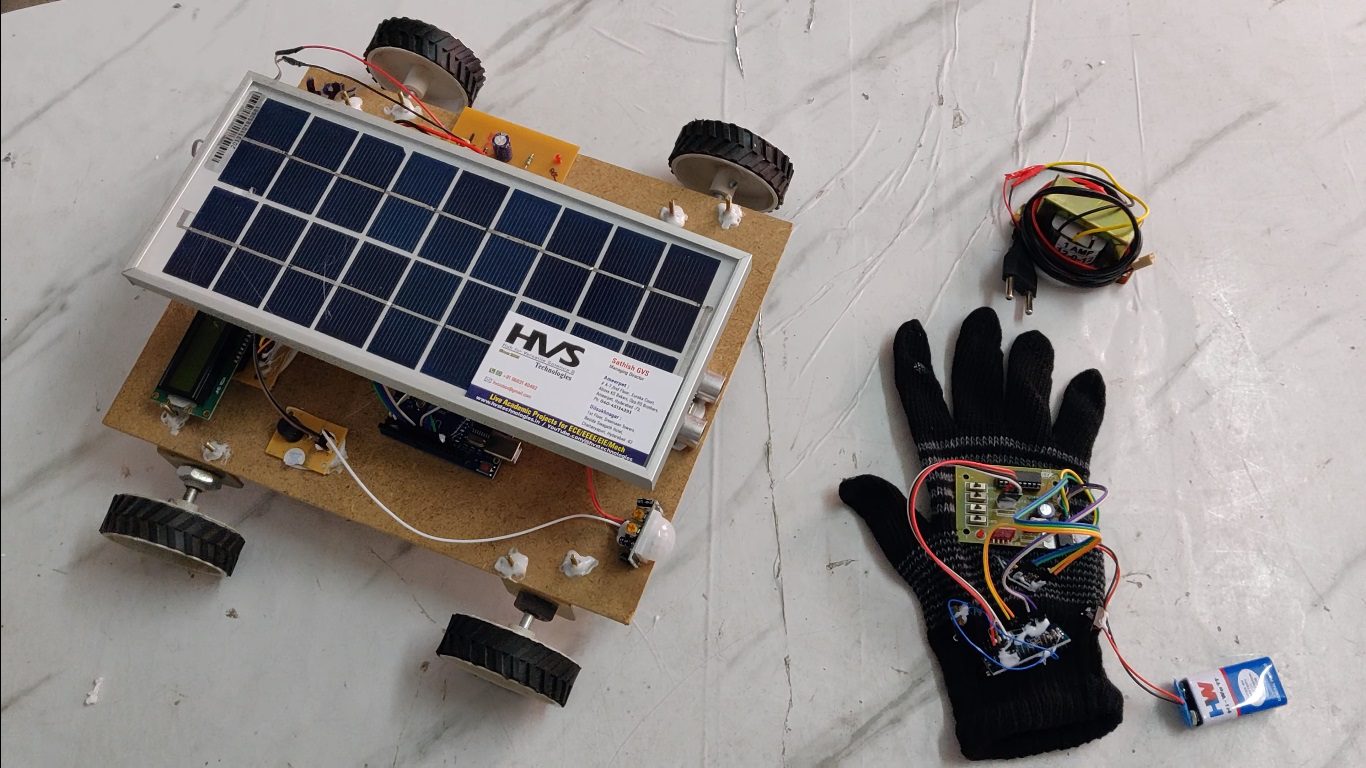

In modern military environments, ensuring safe surveillance and reconnaissance without risking human life is critically important. This project presents the design and development of a Solar Powered Gesture-Controlled Military Robot with Human Detection and Obstacle Avoidance. The system enables wireless robot navigation using hand gestures, making operation intuitive and efficient in challenging terrains.
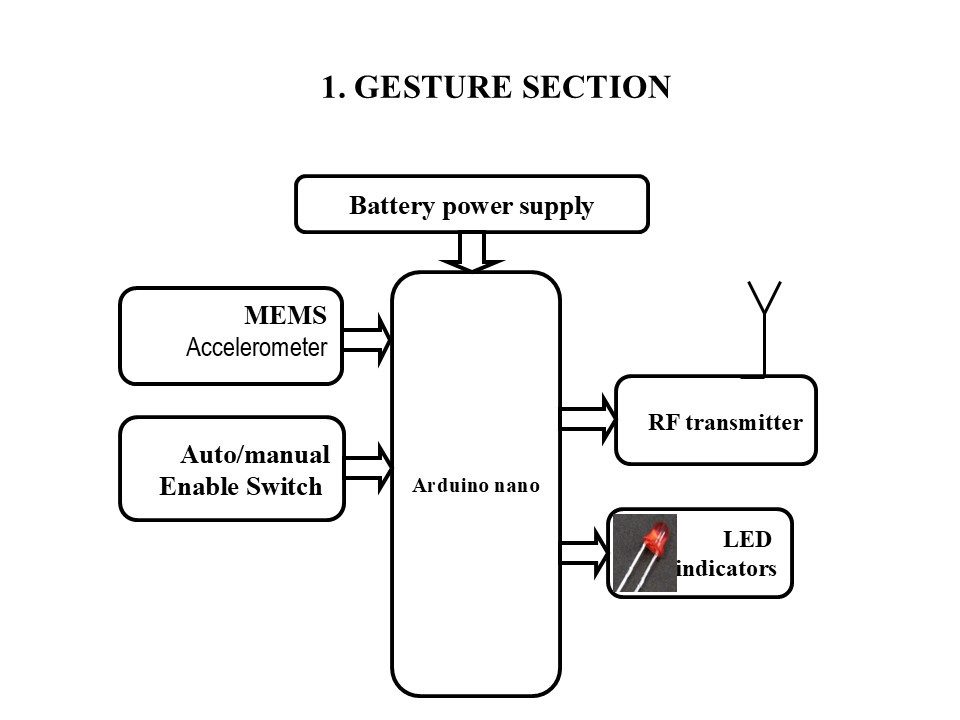
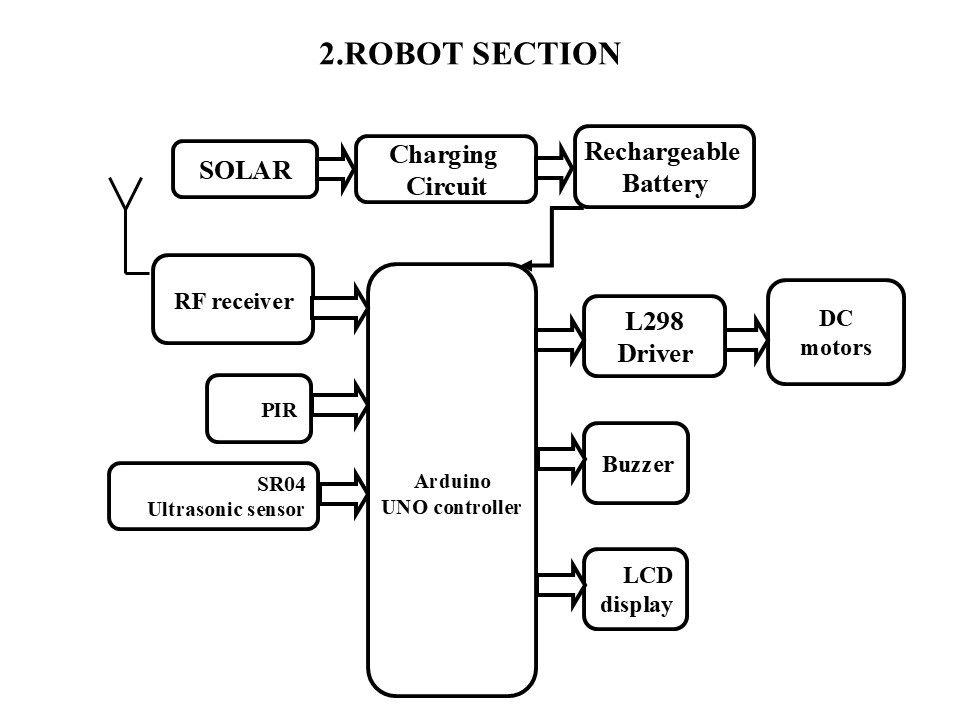
The gesture control unit is built using a MEMS accelerometer interfaced with an Arduino Nano. Hand movements are detected and converted into directional commands, which are transmitted wirelessly through an RF transmitter. The robot section receives these commands via an RF receiver and processes them using an Arduino Uno for motion control.
To enhance operational intelligence, the robot integrates a PIR sensor for human detection and an ultrasonic (SR04) sensor for obstacle detection. The PIR sensor identifies motion in restricted zones, enabling surveillance capabilities, while the ultrasonic sensor continuously monitors nearby obstacles to prevent collisions. The robot can function in both manual (gesture-based) and autonomous modes, selectable through a control switch.
A solar-powered charging system with a rechargeable battery ensures energy-efficient and long-duration deployment in remote military bases. The L298 motor driver controls the DC motors for movement, while a buzzer provides alert signals during human detection or obstacle proximity. Real-time information such as gesture commands, detected obstacles, and operational mode is displayed on an LCD screen for monitoring.
This system offers a cost-effective, energy-efficient, and safe robotic solution for military surveillance, border monitoring, and hazardous area inspection, reducing human risk while enhancing operational capability.
The main objectives of the project are:
 video:
video:
To develop a wireless gesture-based control system that allows intuitive robot movement using hand motions.
To implement human detection using a PIR sensor for surveillance in restricted or sensitive military zones.
To integrate obstacle detection using an ultrasonic (SR04) sensor to enable safe navigation and collision avoidance.
To design a system capable of operating in both manual (gesture-controlled) and autonomous modes.
To establish reliable RF wireless communication between the gesture unit and the robot.
To utilize solar energy with rechargeable battery storage for long-duration and energy-efficient operation in remote locations.
To provide real-time system feedback such as motion direction, obstacle distance, and operating mode through an LCD display.
To enhance safety by generating alerts using a buzzer during human detection or obstacle presence.
To build a cost-effective and low-power surveillance robot suitable for military base monitoring and hazardous area inspection.
The major building blocks of this project are:- Solar.
- Charging Circuit.
- Battery.
- Arduino uno and Arduino nano Microcontrollers.
- MEMS Accelerometer sensor.
- RF transmitter and receiver modules.
- PIR Sensor.
- Encoder and Decoder.
- SR04 Ultrasonic sensor.
- Mode Enable Switch
- DC motors with drivers.
- LED indicators
- Embedded C programming.
- Arduino IDE for dumping code into Micro controller.
- Express SCH for Circuit design.
 video:
video:







