No products in the cart.




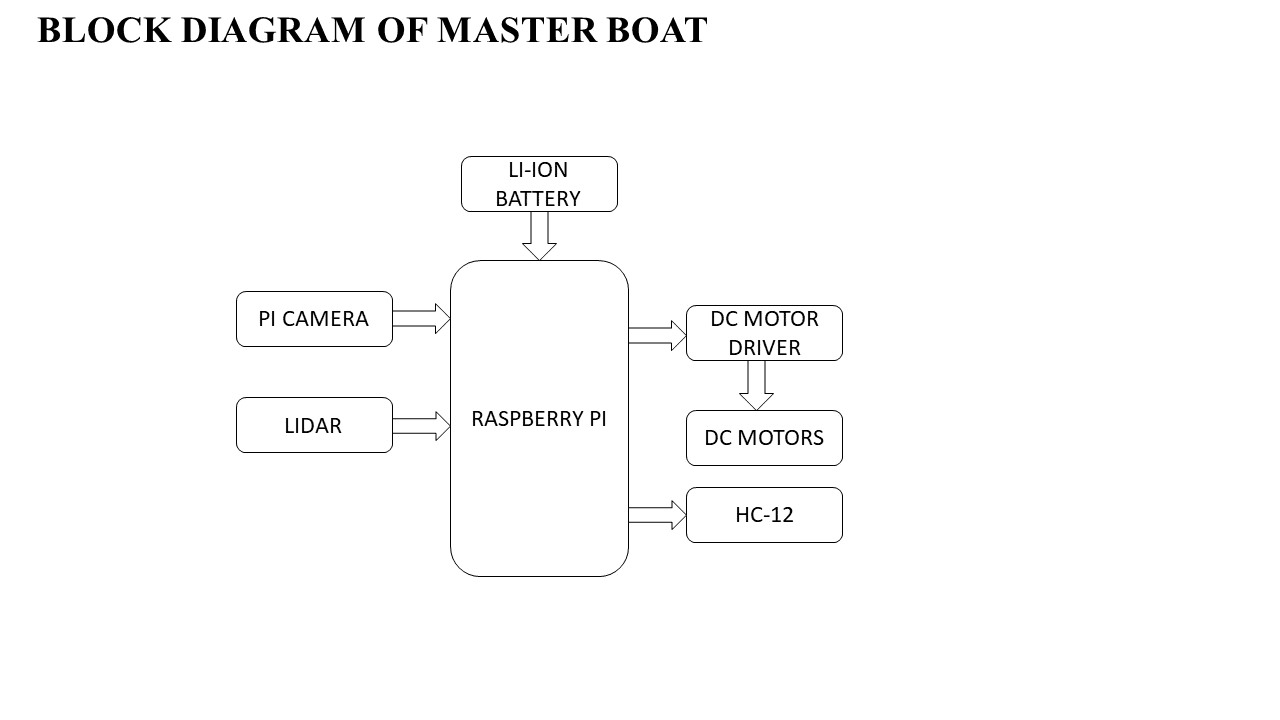
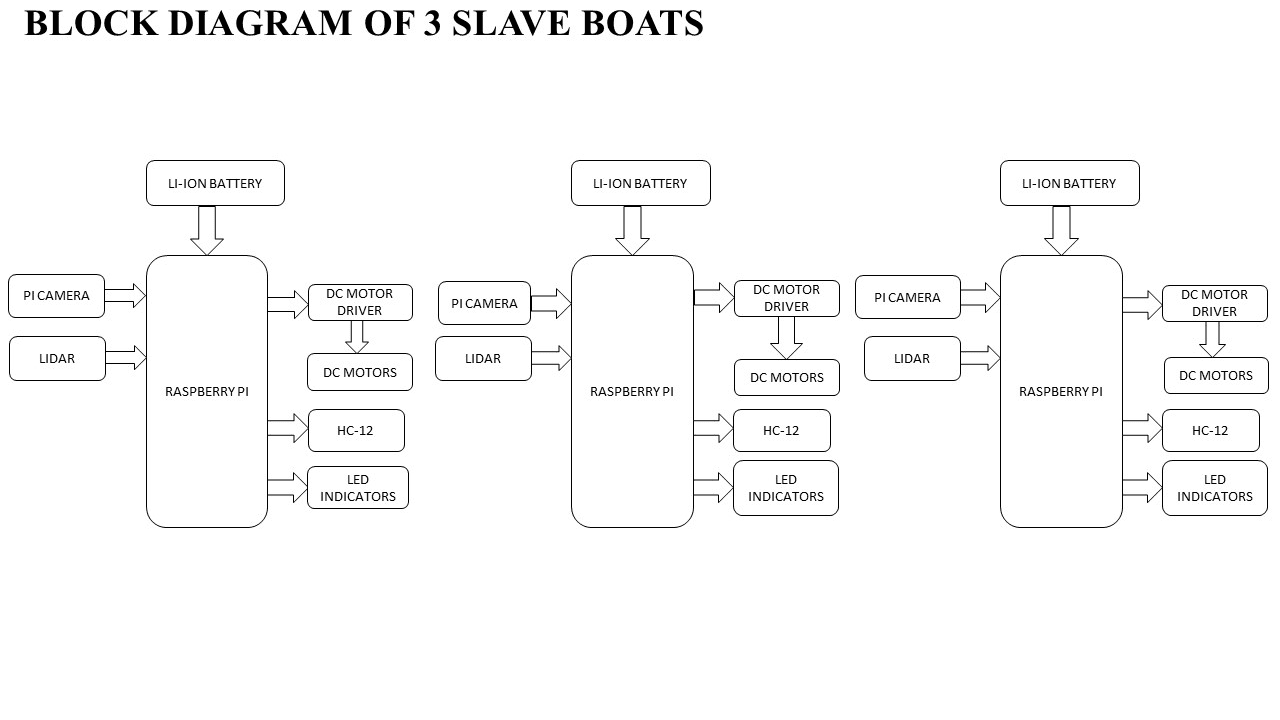
In our project. Total four boats will be there. One is the master, three are the slaves. So generally, we need to place these four boats in a particular square model at a distance of 1 meter, 1 meter and master boat will get the user input whether it is a manual controlling or automatic controlling from the browser. And when we are controlling the Master boat in manual mode, Remaining three slave boats automatically will follow inside the forward and three will forward left right. So condition is we have already placed these four boats in a particular manner, In the automatic mode, When we switching the master boat to automatic mode. Pushing the buttons on the browser only so then the master boat will inform the remaining three slave boats to follow the particular boats, and the master boat will follow one particular object which is floating On the water, whether it is a red ball or any specific boat or any ship. So you follow there, if it's a moving master boat option will move towards the particular object.
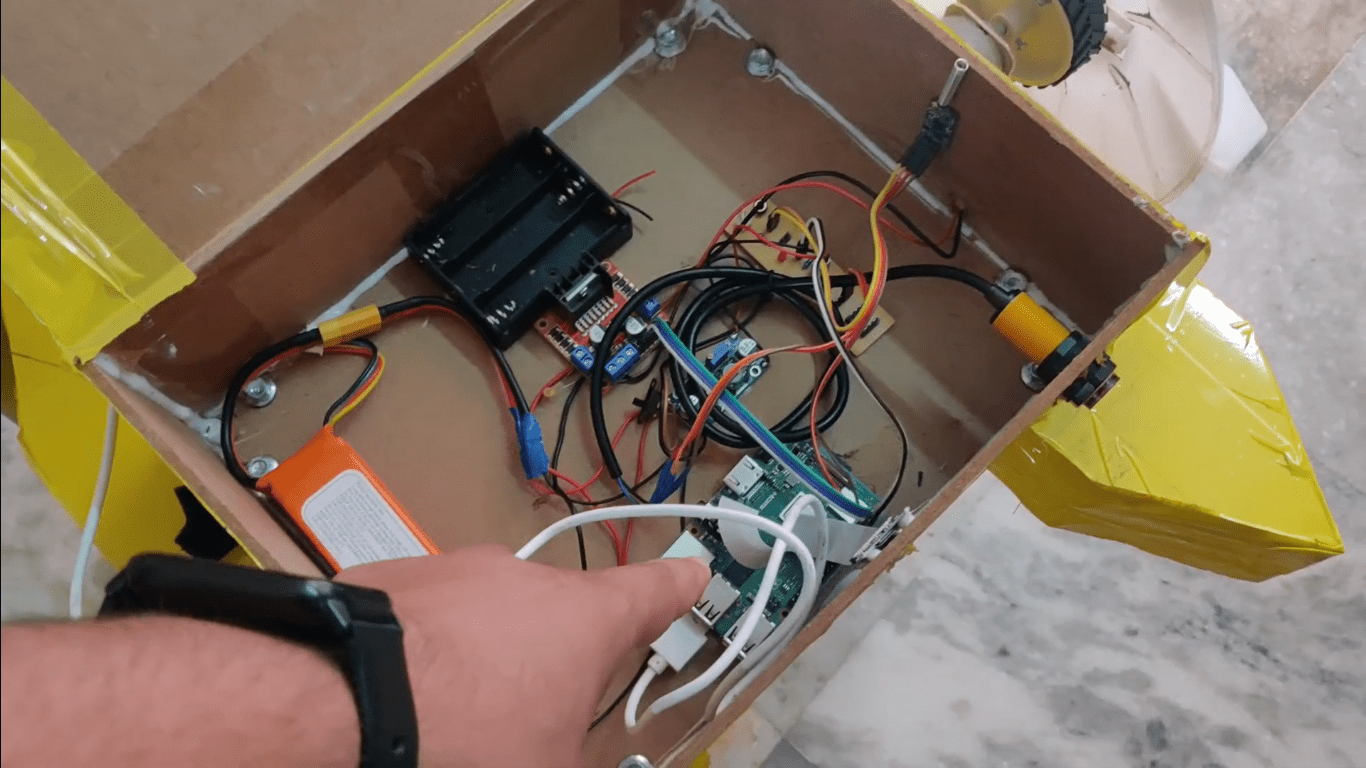
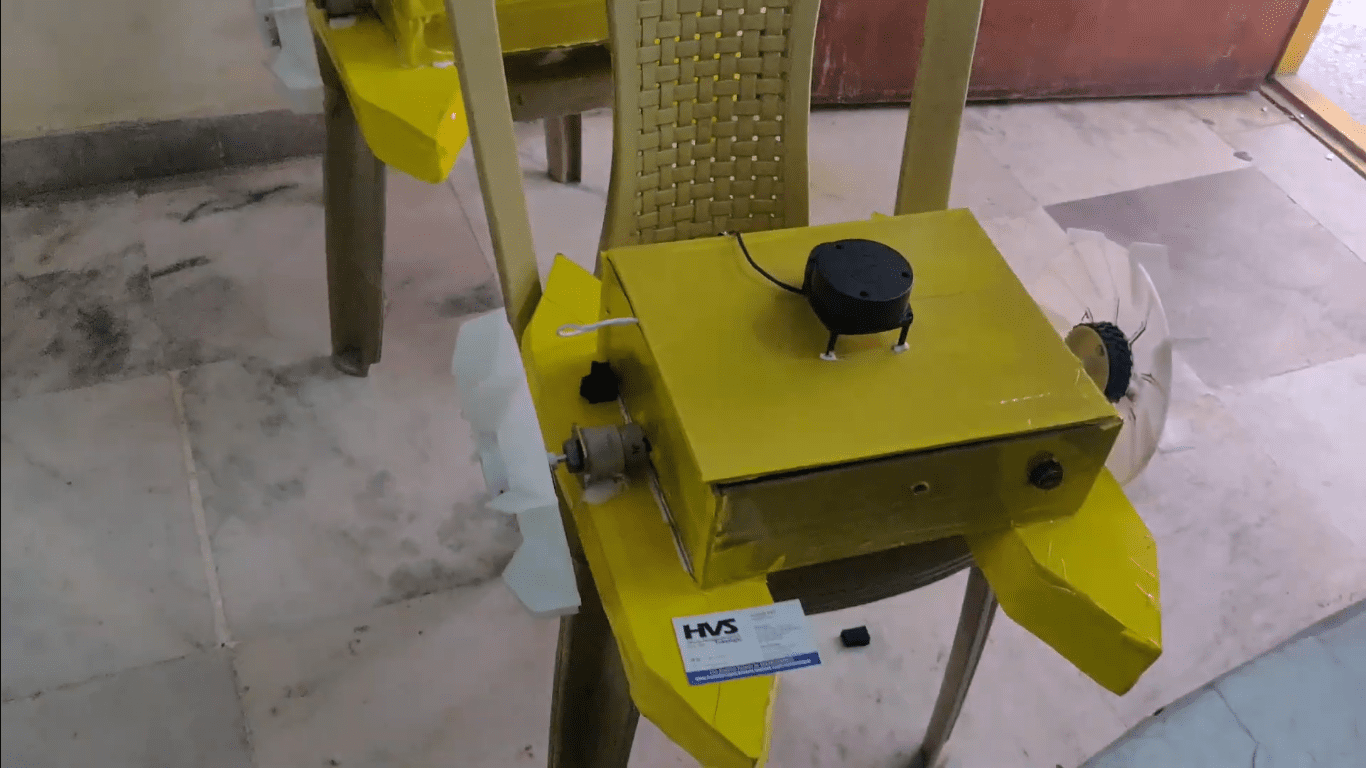
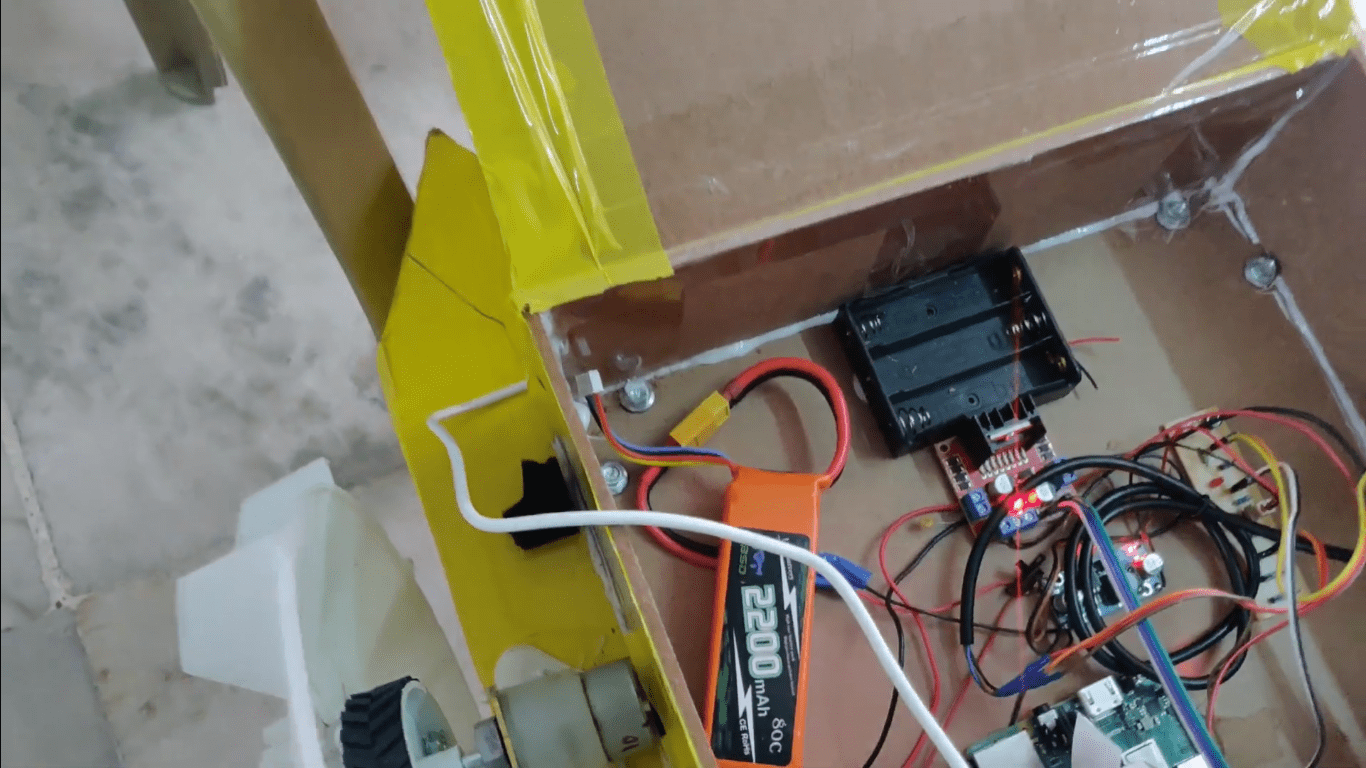
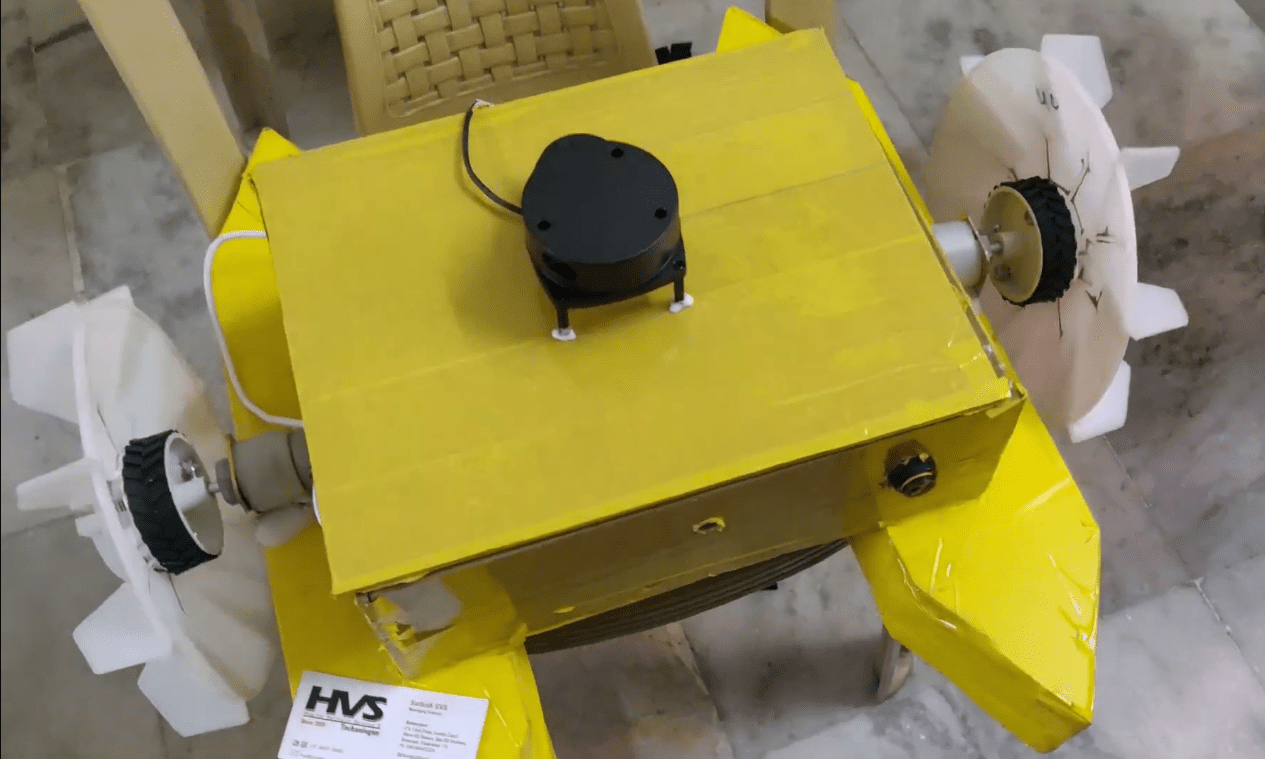
And at the point we have already placed the lidar, so which is easy to detect the objects in 360 degrees. So if in any particular side, for example, in 180 degrees, if any object Is detected. So as we have already four boats, we are going to divide, The four boats in 360 degrees Direction wise ,nothing but each Boat will get the vision of the 90 degrees. Slave three and slave two Like that, Particular side obstacle detected. Then the master boat will inform to the base station through the Zigbee only. So Zigbee technology only through the base station inform that at master boat end there is an obstacle detected. Which was directed by the Lidar. Then base station person will login through the IP address of the respective boats and get the live streaming in the browser from the base station only through WIFI technology.
The main object of this project:
 video:
video:
- Autonomous Navigation.
- Swarm Coordination.
- Target Detection.
- Decision Making.
- LINUX operating system.
- Express SCH for Circuit design.
 video:
video:







