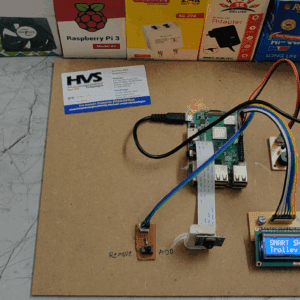
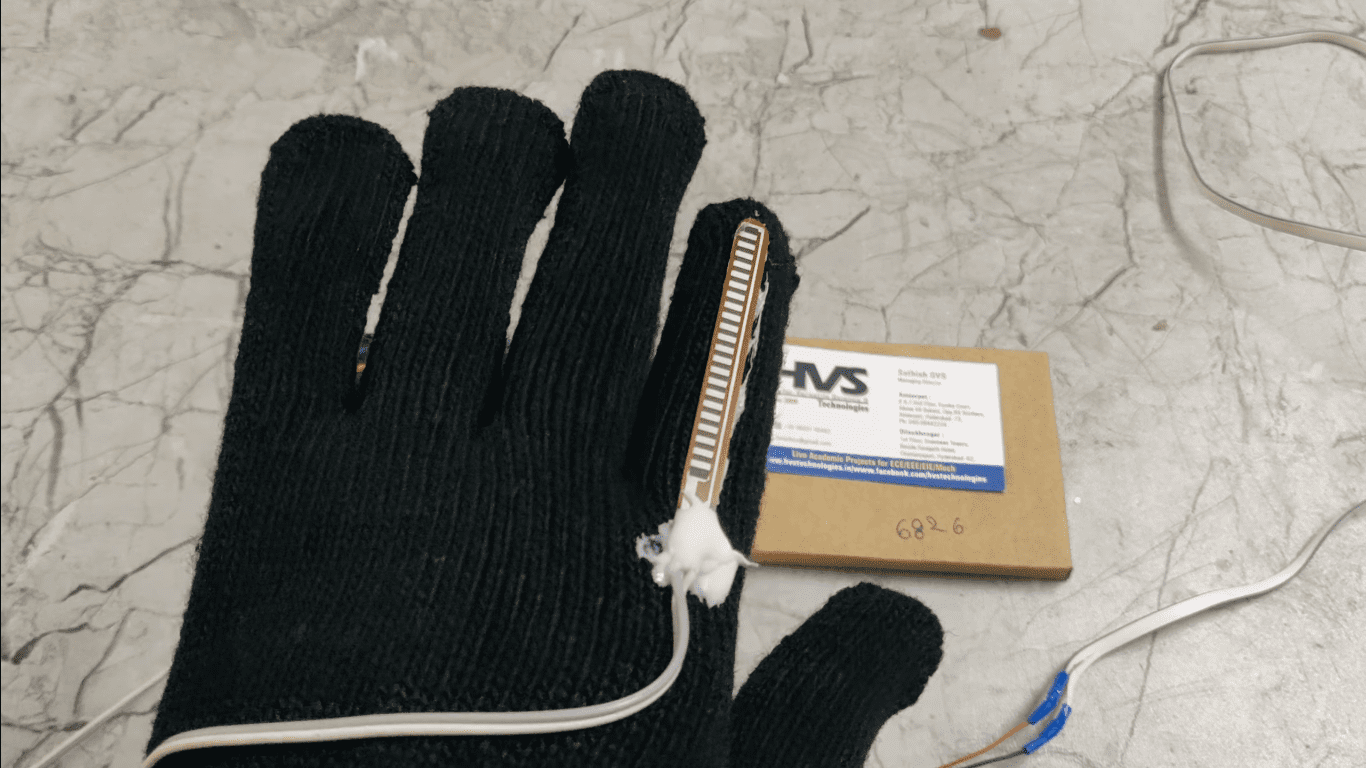
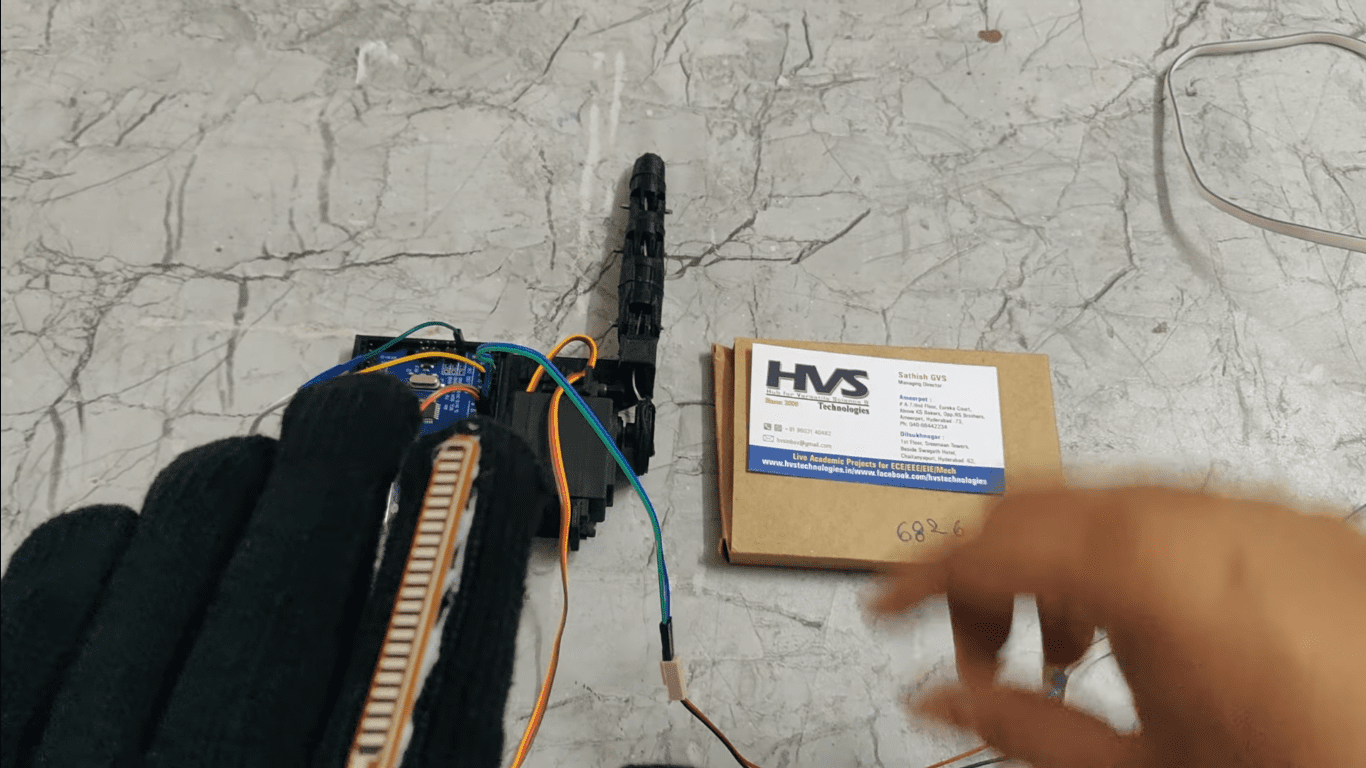
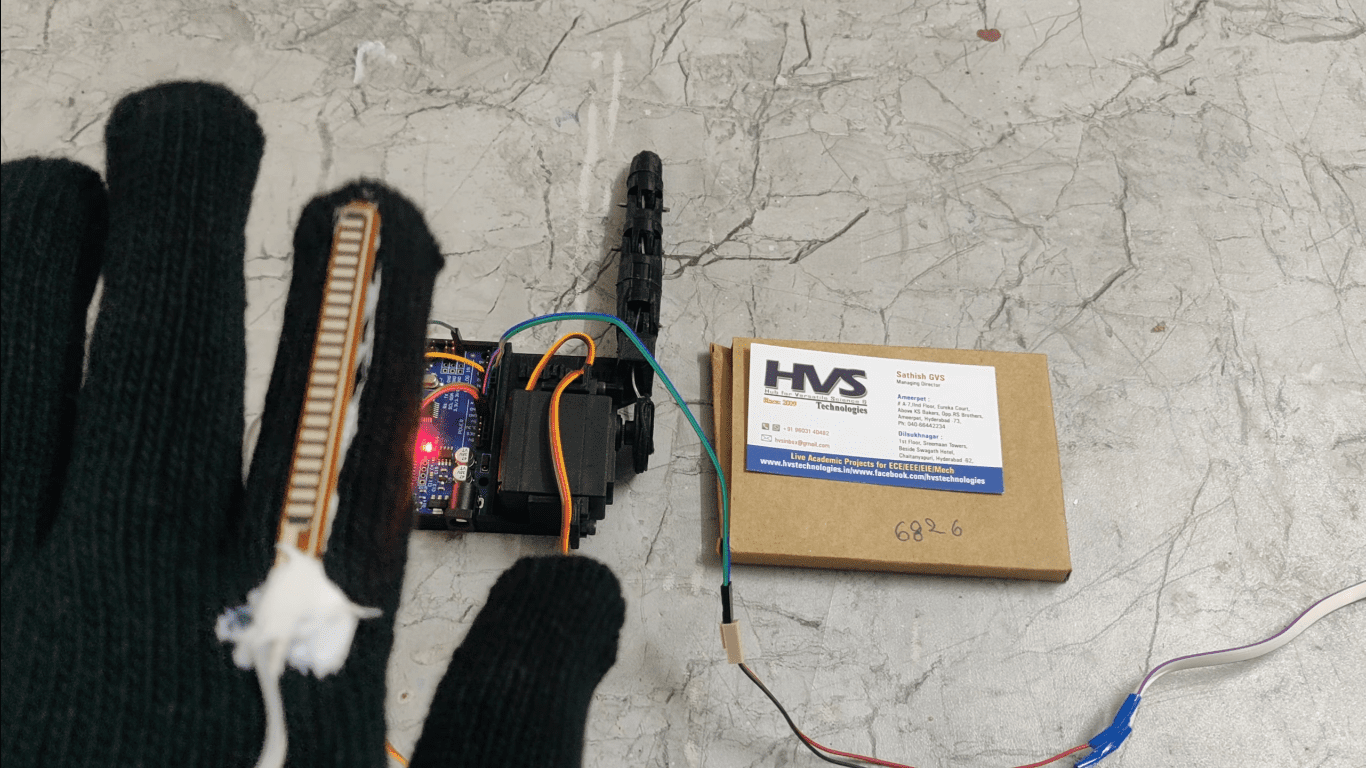
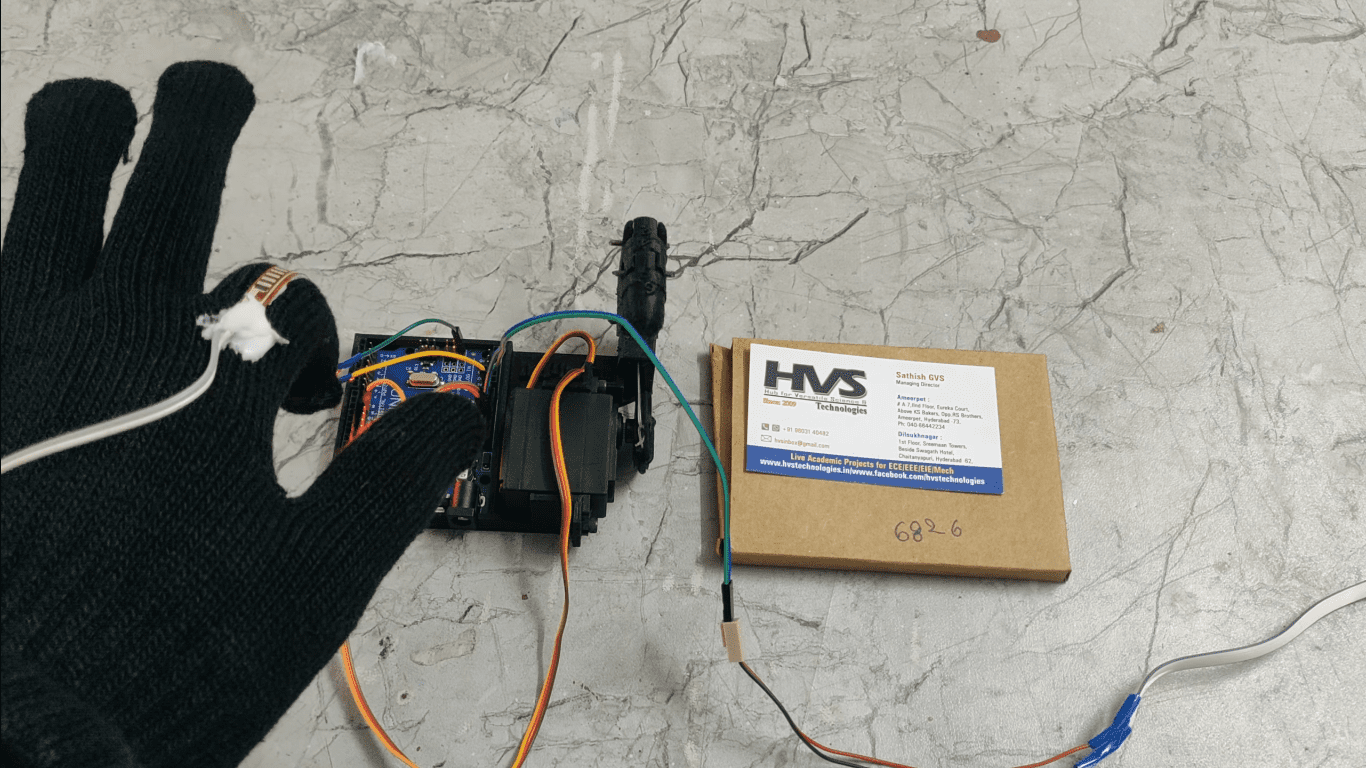
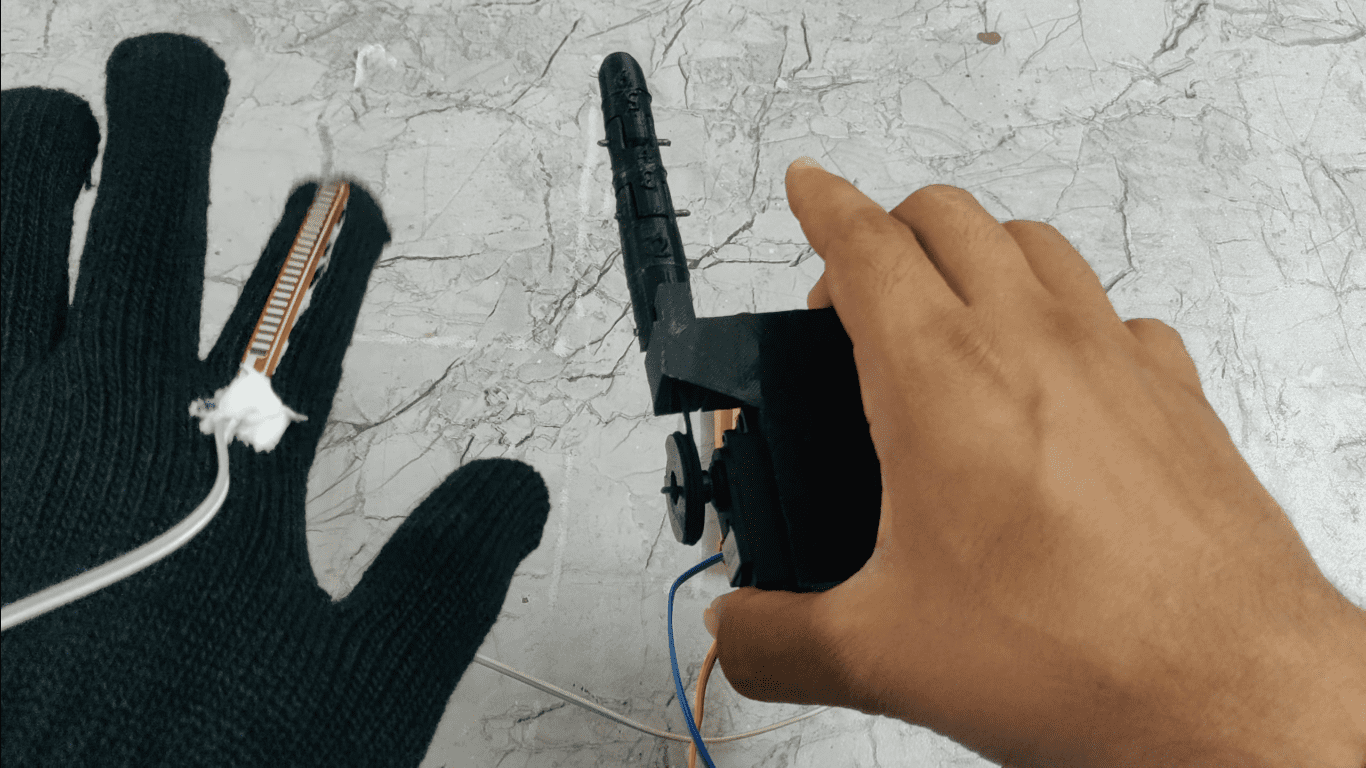
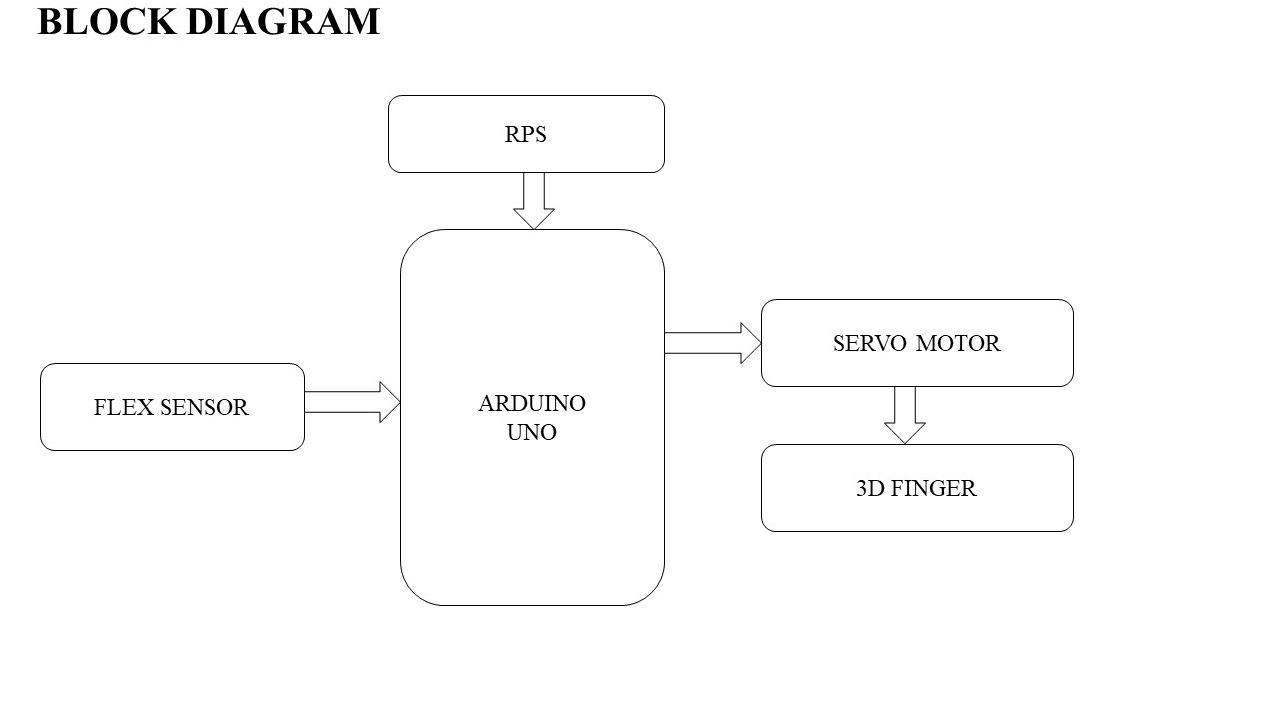
This project focuses on the design and fabrication of a prosthetic finger robot utilizing a combination of a flex sensor, Arduino UNO microcontroller, servo motor, and a 3D-printed finger structure. The aim is to develop a prosthetic device that offers improved dexterity and functionality for users with hand impairments. The prosthetic finger features a custom 3D-printed structure that is both lightweight and durable, ensuring a comfortable fit and reliable performance. A flex sensor is embedded within the finger to detect bending movements, which are then analyzed by the Arduino UNO. The microcontroller processes this data to control a servo motor, which adjusts the finger’s articulation in response to the detected movements.
 1 × ₹12,500.00
1 × ₹12,500.00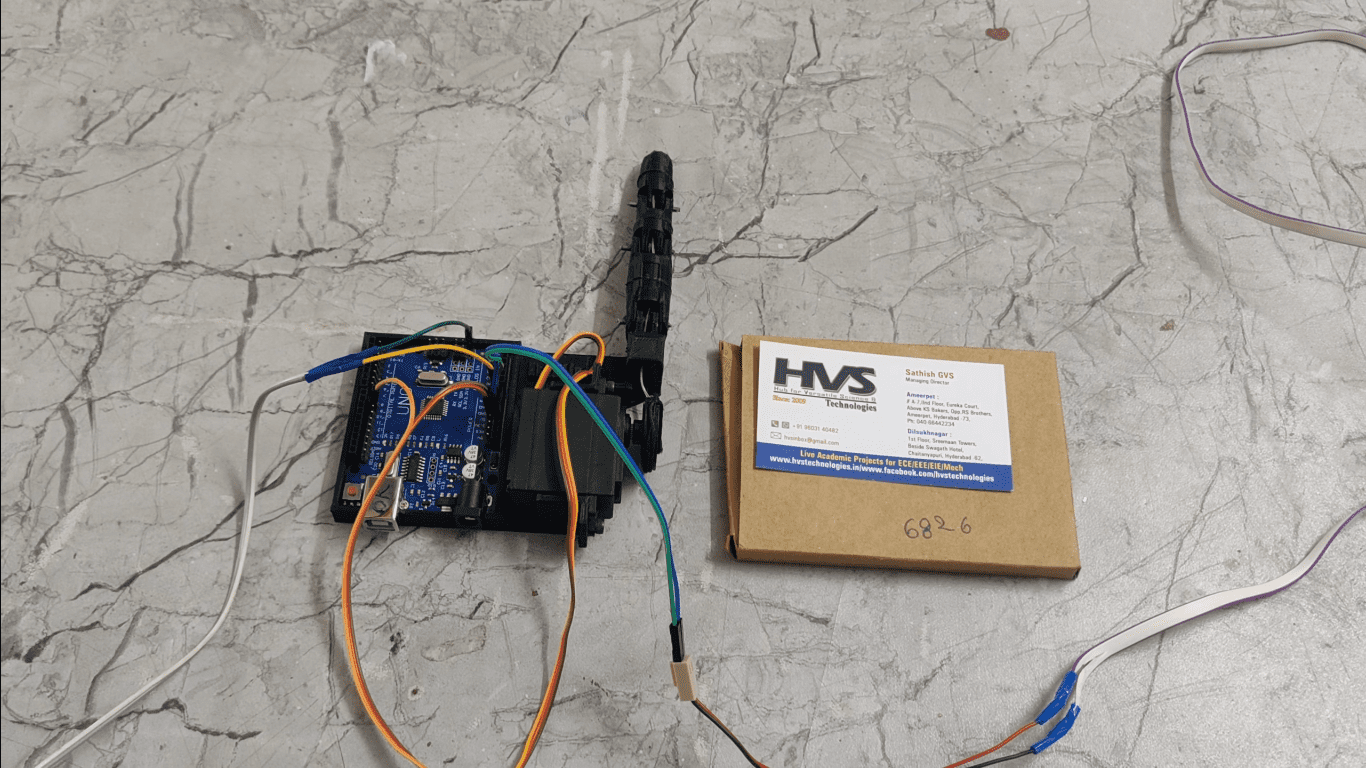
 video:
video:









