No products in the cart.



The main aim of this project is to design a robotic arm which is operated wirelessly using flex and MEMS technology. In this we are using ZIGBEE wireless communication between hand gesture and arm.
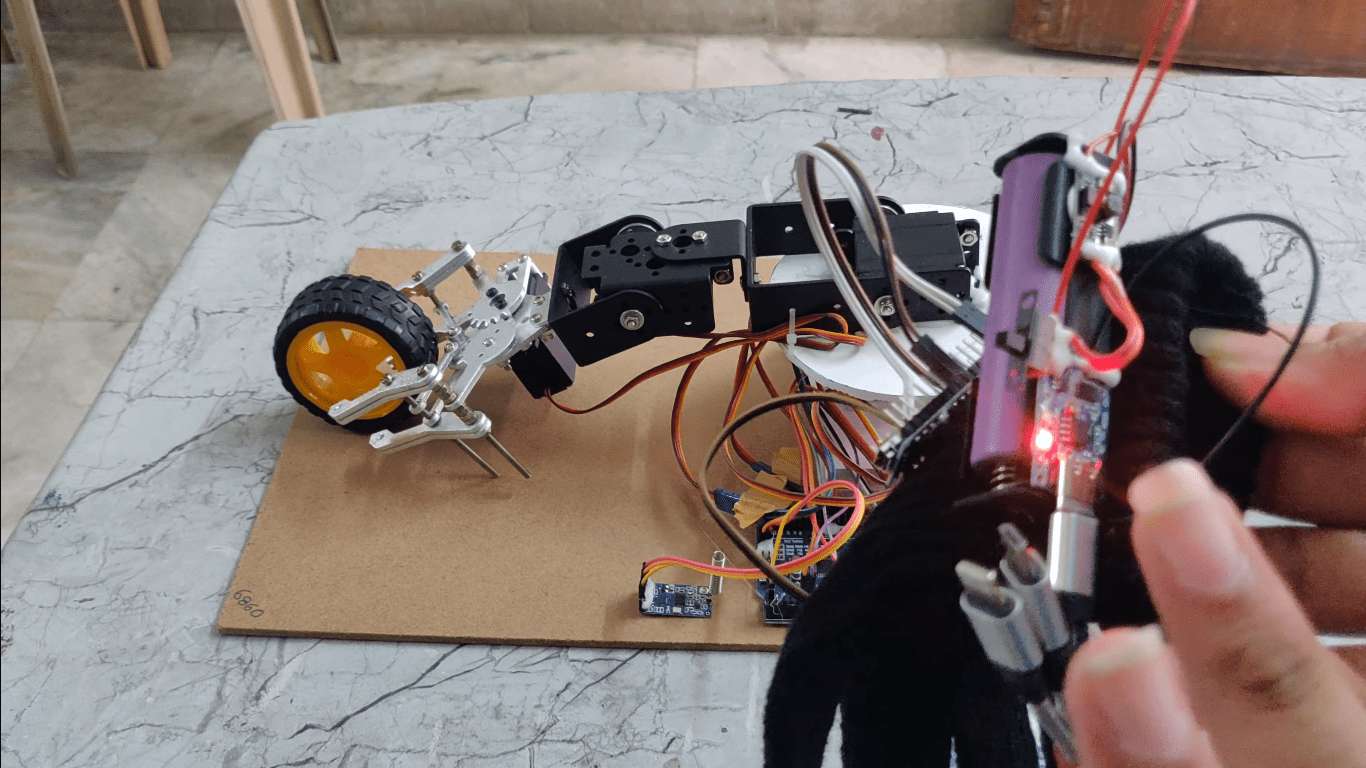
This flex sensor is a unique component that changes resistance in proportion to the degree it is bent. The sensor when lying flat has a nominal resistance of 10,000 ohms (10K). As the flex sensor is bent the resistance increases in proportion. At 90 degrees the sensors resistance will increase to approximately 35,000 ohms (35K).This device is very helpful for paralysis and physically challenged persons.
Zigbee is a PAN technology based on the IEEE 802.15.4 standard. Unlike Bluetooth or wireless USB devices, Zigbee devices have the ability to form a mesh network between nodes. Meshing is a type of daisy chaining from one device to another. This technique allows the short range of an individual node to be expanded and multiplied, covering a much larger area.
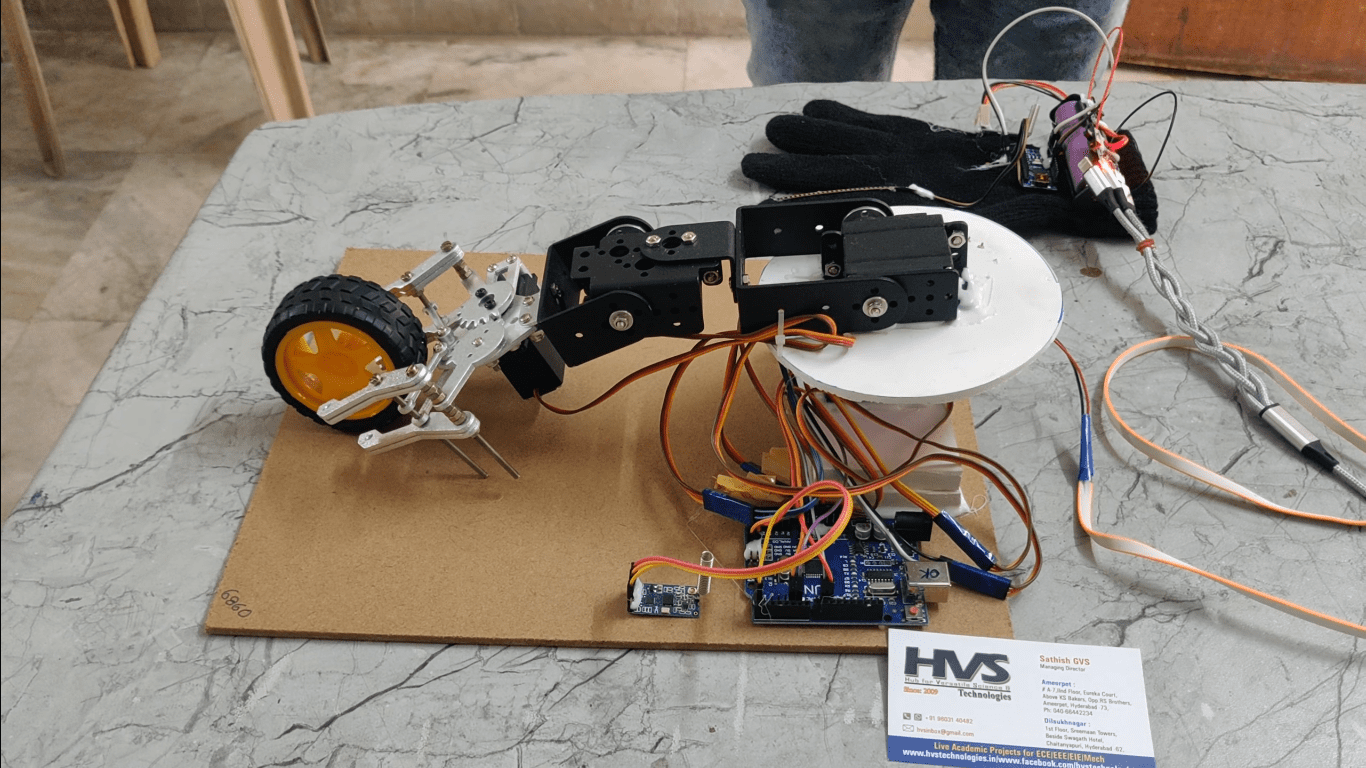
This project makes a use of MEMS, flex sensor, zigbee tx, zigbee rx, arduino nano, arduino UNO, Servo motors along with gripper.
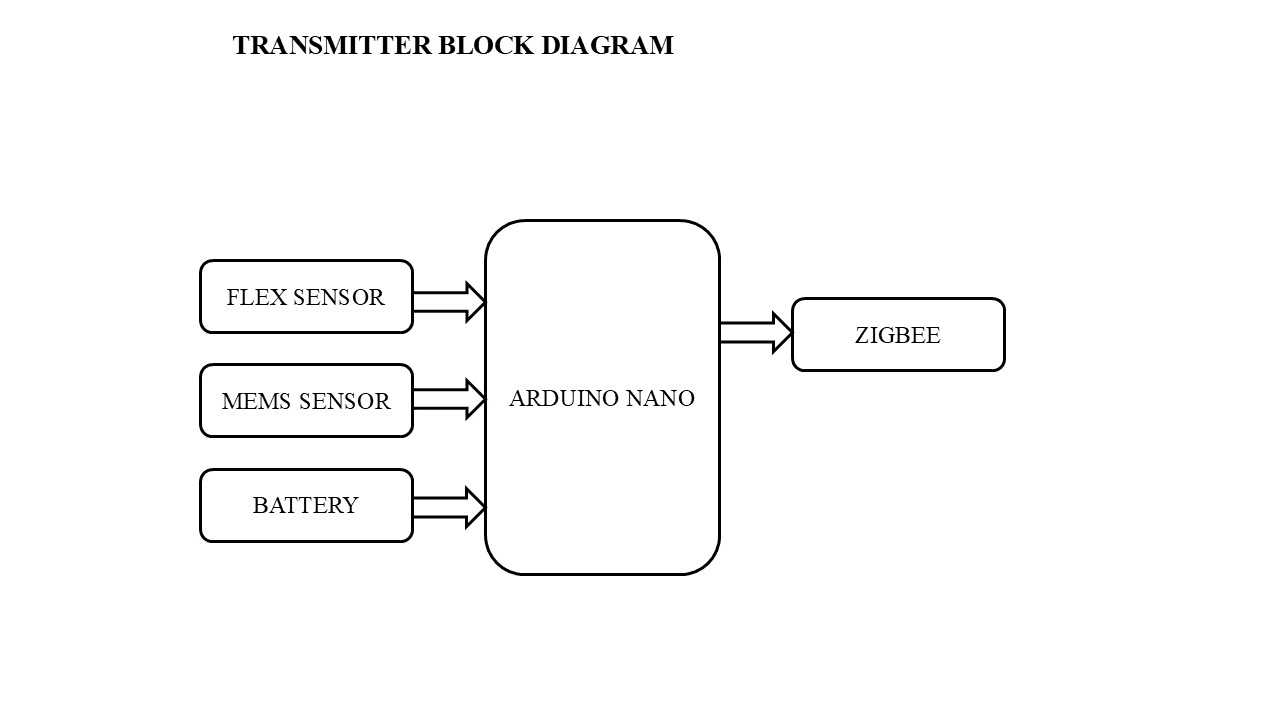
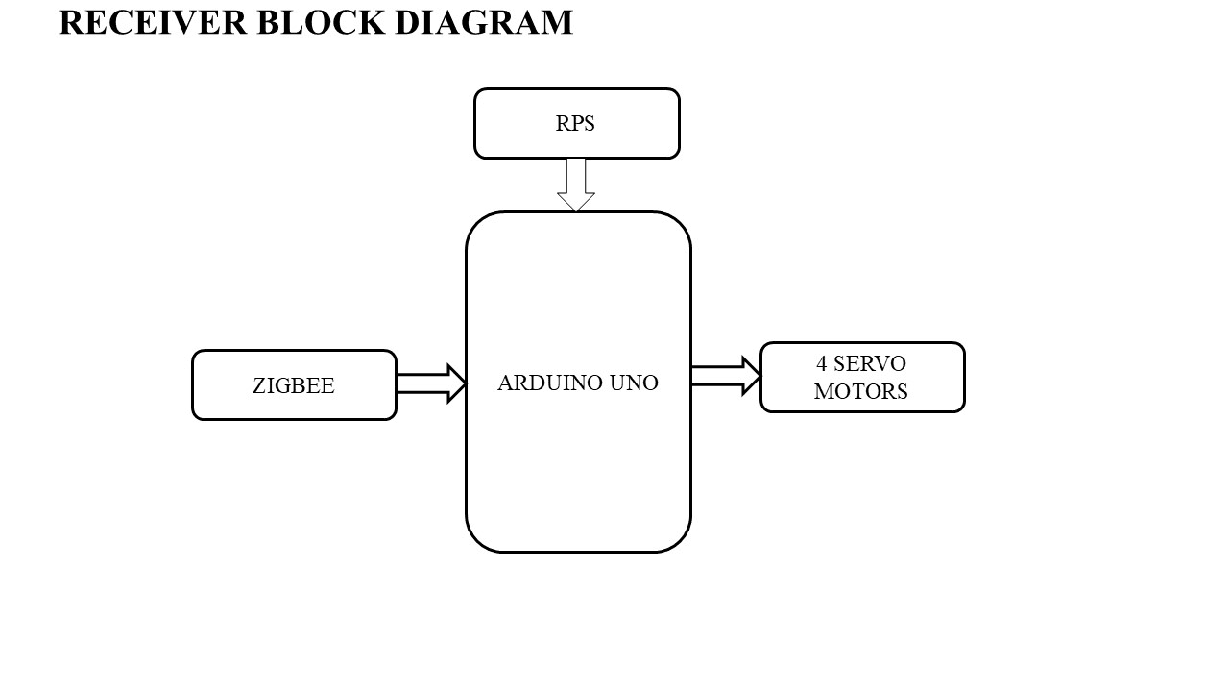
The MEMS sensor is uses for rotational velocity along the X, Y, Z axes to control the up and down motion of robotic arm. Flex sensor gives resistance value in accordance to the direction which it is bent to control the ARM fingers. These values are fed to the arduino nano microcontroller. This data is transmits with the help of Zigbee transmitter module and received by zigbee receiver also fed as same to the arduino UNO.
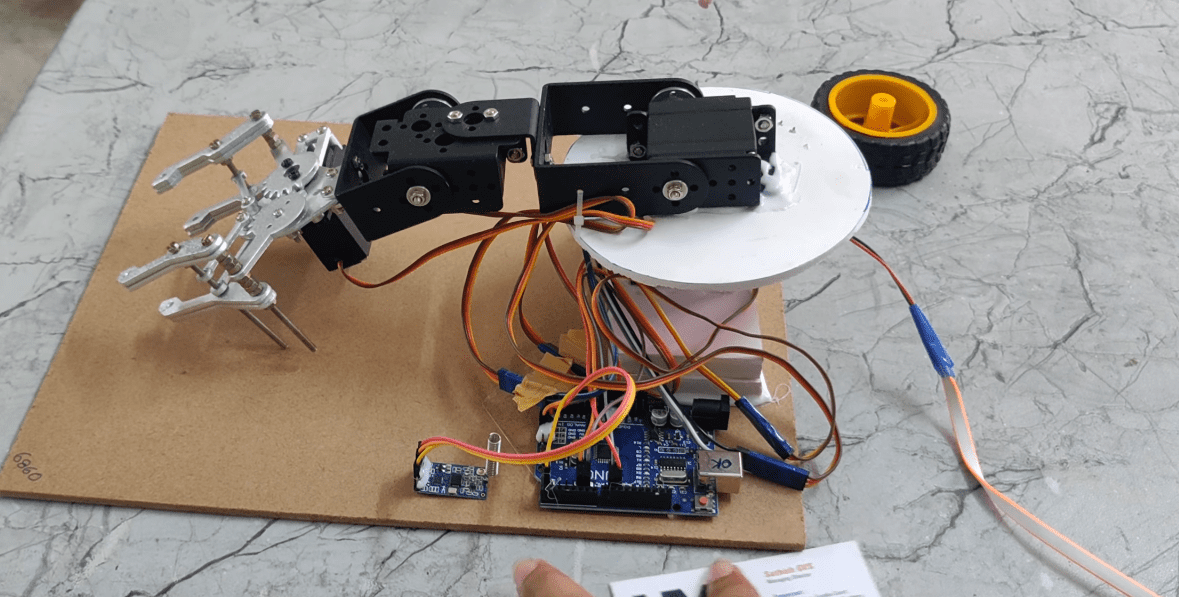
The Servo motors along are interfaced to the arduino UNO microcontroller. Based on the received data arduino will control the direction of ARM. This ARM will control the up-down and open-close motions to pick and place the objects.
The main objectives of the project:
 video:
video:
- Designs a wireless control robotic ARM.
- Hand gesture using MEMS and FLEX sensor.
- Wireless communication using Zigbee technology.
- To achieve this task using arduino uno, nano Microcontroller.
- Regulated power supply.
- Battery Supply(9v,12v).
- Arduino uno Microcontroller.
- Arduino nano.
- Flex sensor.
- MEMS sensor.
- Zigbee transmitter and receiver modules.
- 4-Servo motors.
- Robotic arm.
- Hand glove.
- LED indicators.
- Arduino IDE for compiling and dumping code into Microcontroller.
- Express SCH for Circuit design.
 video:
video:







