No products in the cart.



Note: mentioned price excluding shipping charges.
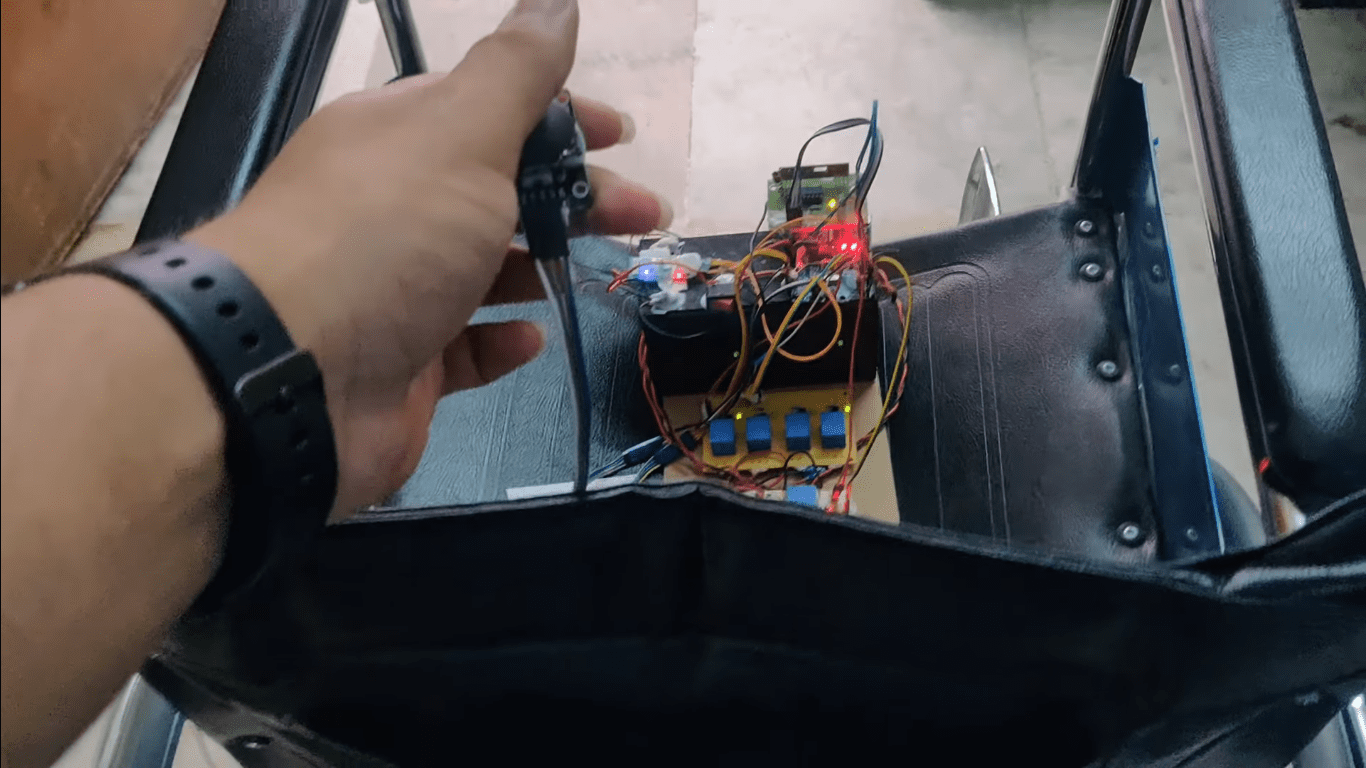
The main aim of this project is to design a wheel chair for physically challenged people to mainly help for the leg amputees.As this project uses joystick technology, MEMS accelerometer and android voice commands for controlling the direction of the wheel chair, which takes less effort by the user to operate it, so that even a patient can operate without any difficulty. Wheel chair movement can be controlled in Forward, Reverse, Left and Right direction and it can be stop.
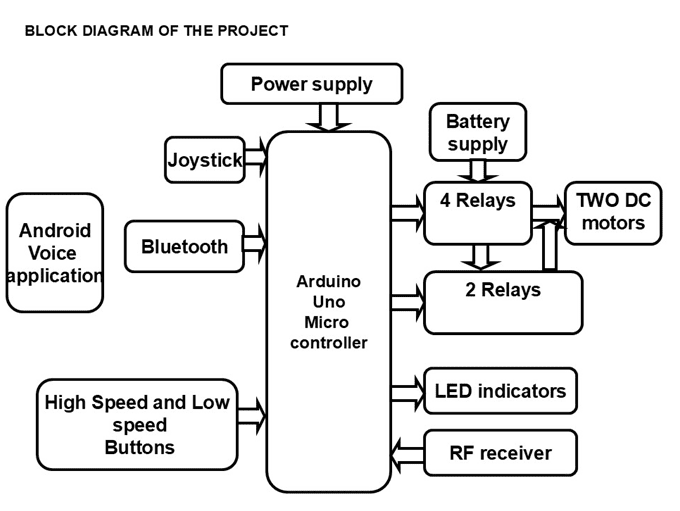
To control the wheel chair by hand movement using joystick. Joystick is a simple device with four direction movement. It can be made to produce an analog voltage which is processed by the microcontroller to produce the corresponding digital output with the help of inbuilt ADC.
To control the wheel chair using voice commands using Bluetooth technology. In this project we are using HC-05 Bluetooth module to receives the voice commands from android voice app.
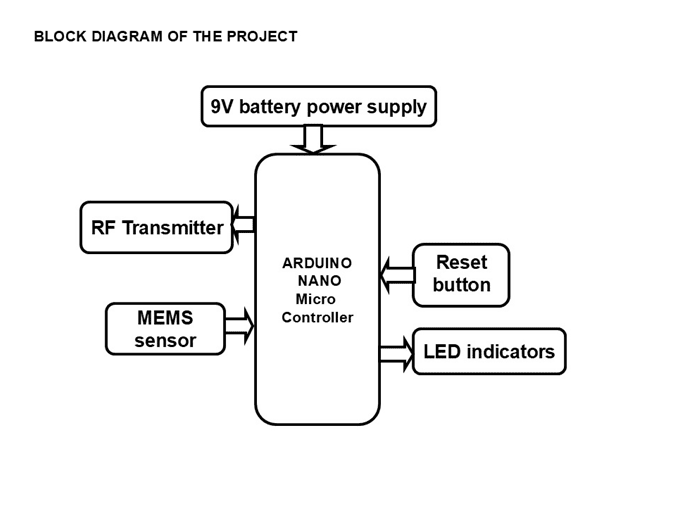
To control the wheel chair by head movement using MEMS accelerometer.ADXL345 Tripple Axis Accelerometer Board is a small, thin, low power, 3-axis accelerometer with high resolution (13-bit) measurement at up to ±16g. Digital output data is format as 16-bit twos. It measures the static acceleration of gravity in tilt-sensing applications. By using two pushbuttons we can set speed of wheelchair as increase or decrease.
Arduino will continuously read the data from HC-05 Bluetooth module, mems and joystick. Based on the received command Arduino will control the direction (like left, right, front, back and stop) of the wheel chair through relays.
 video:
video:
Features:
- Design of realtime wheelchair can be operated with multiple.
- Wheelchair Speed setting capability.
- To control the wheelchair using joystick, MEMS and Android voice.
This project provides with the learning’s on the following aspects
- Joystick technology.
- Bluetooth wirelesstechnology.
- MEMS Working.
- Interfacing DC Motors with Microcontroller.
- Relay Module Working.
- Embedded C programming.
- PCB Design and development.
The major building blocks of this project are:
- Battery power supply.
- Arduino Micro controller.
- DC motors with Relay drivers.
- Joystick.
- HC-05 Bluetooth.
- Android voice app.
- MEMS .
- Wheel chair.
- Two push buttons.
Software’s used:
- Arduino IDE for compiling and dumping code into Microcontroller.
- Embedded C Language.
- Express SCH for Circuit design.
 video:
video: