No products in the cart.


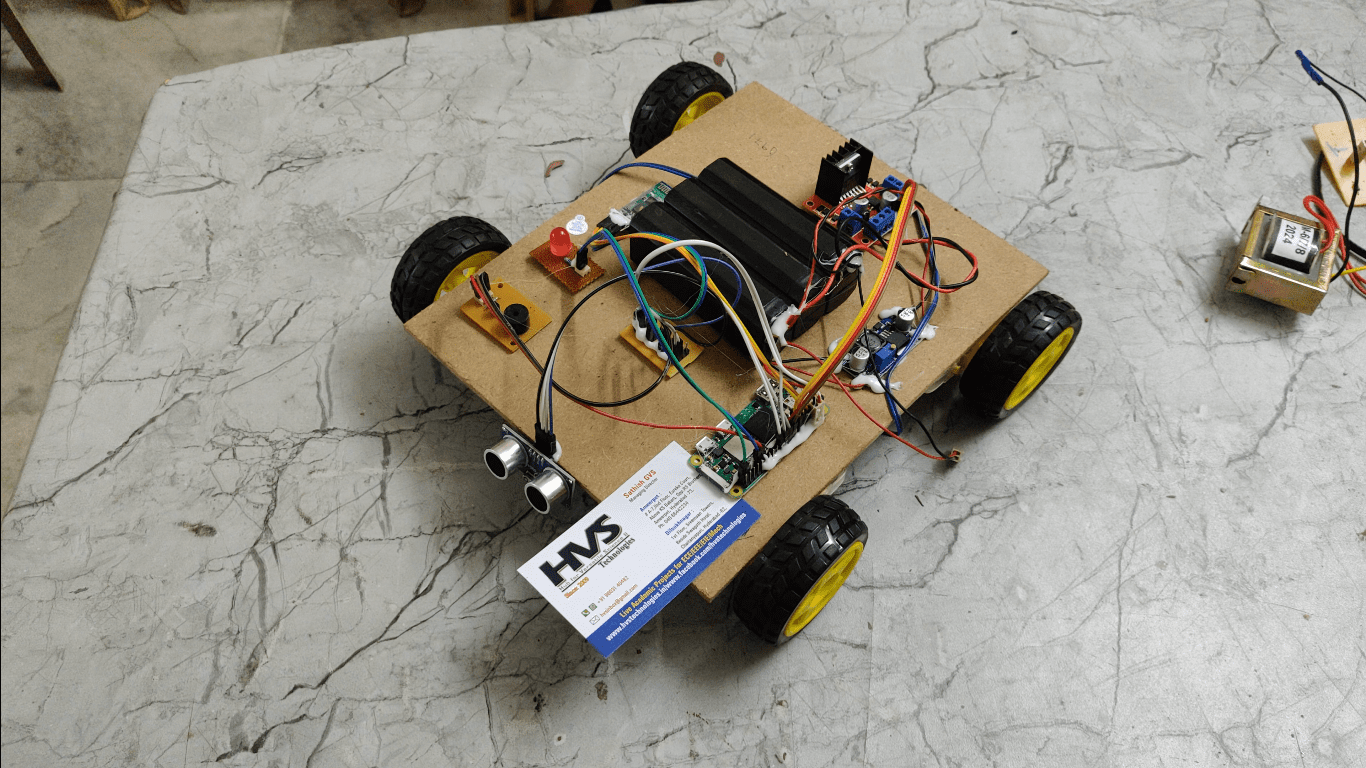
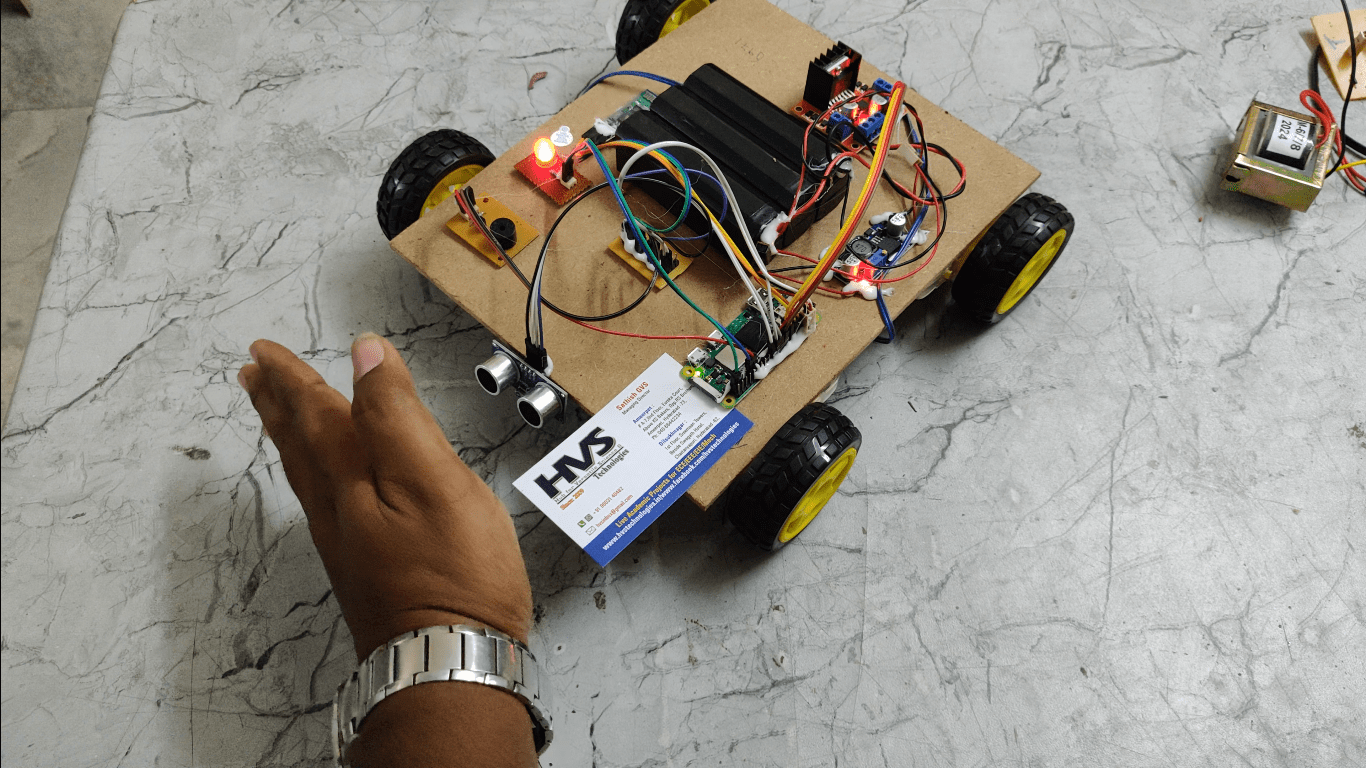
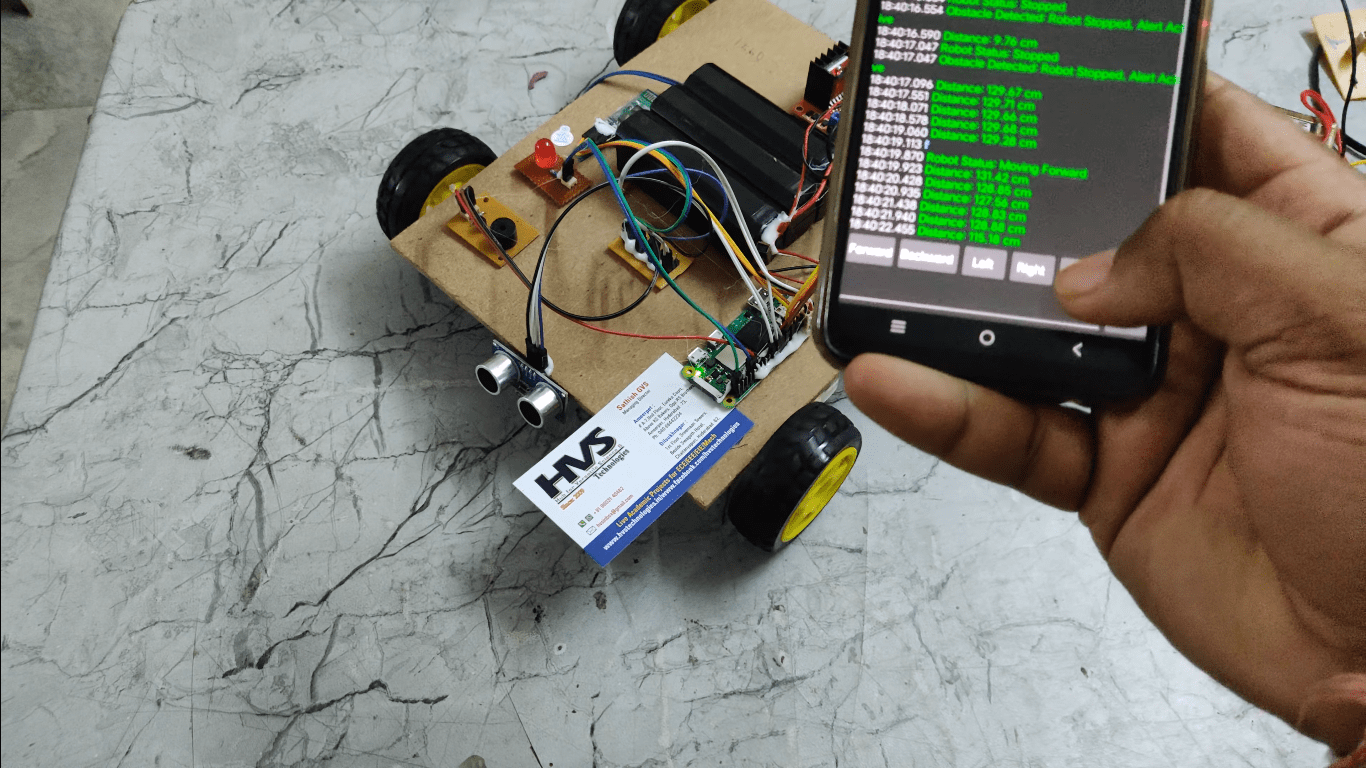
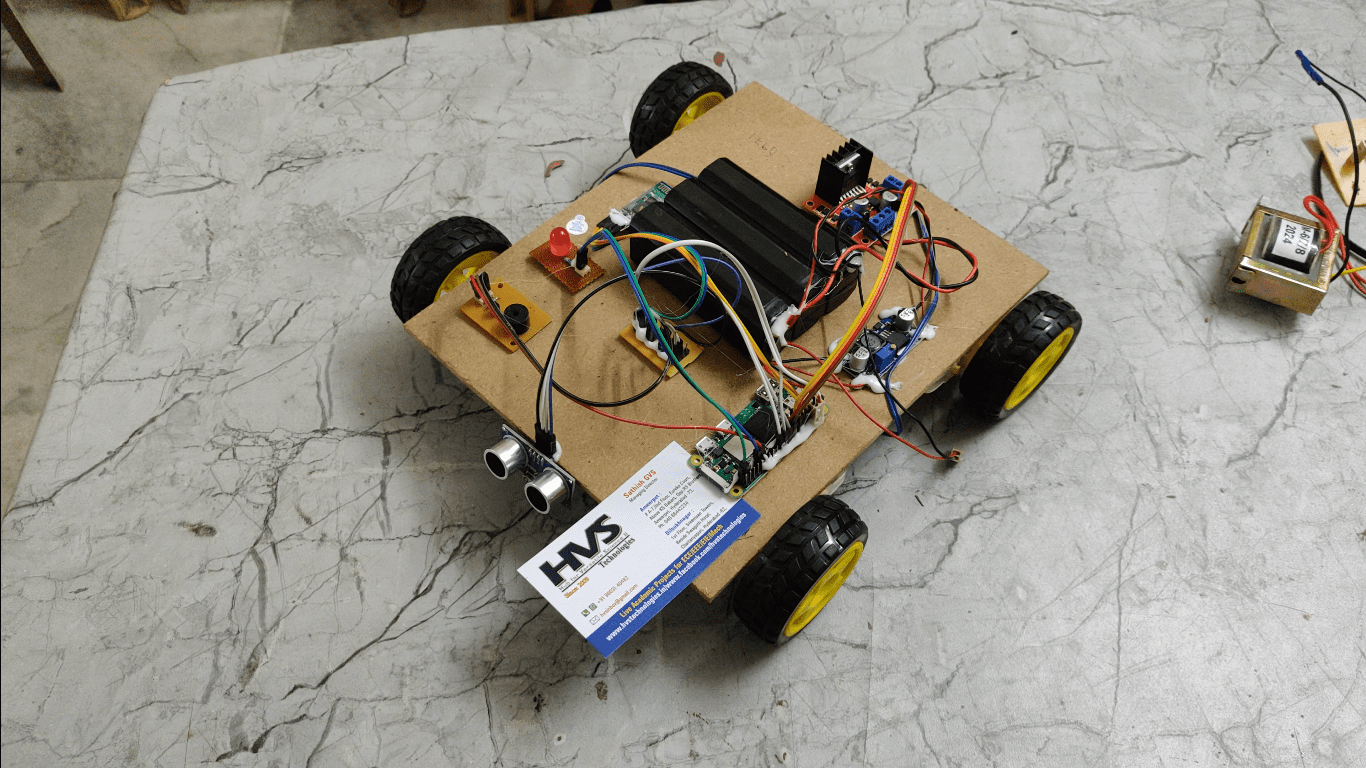
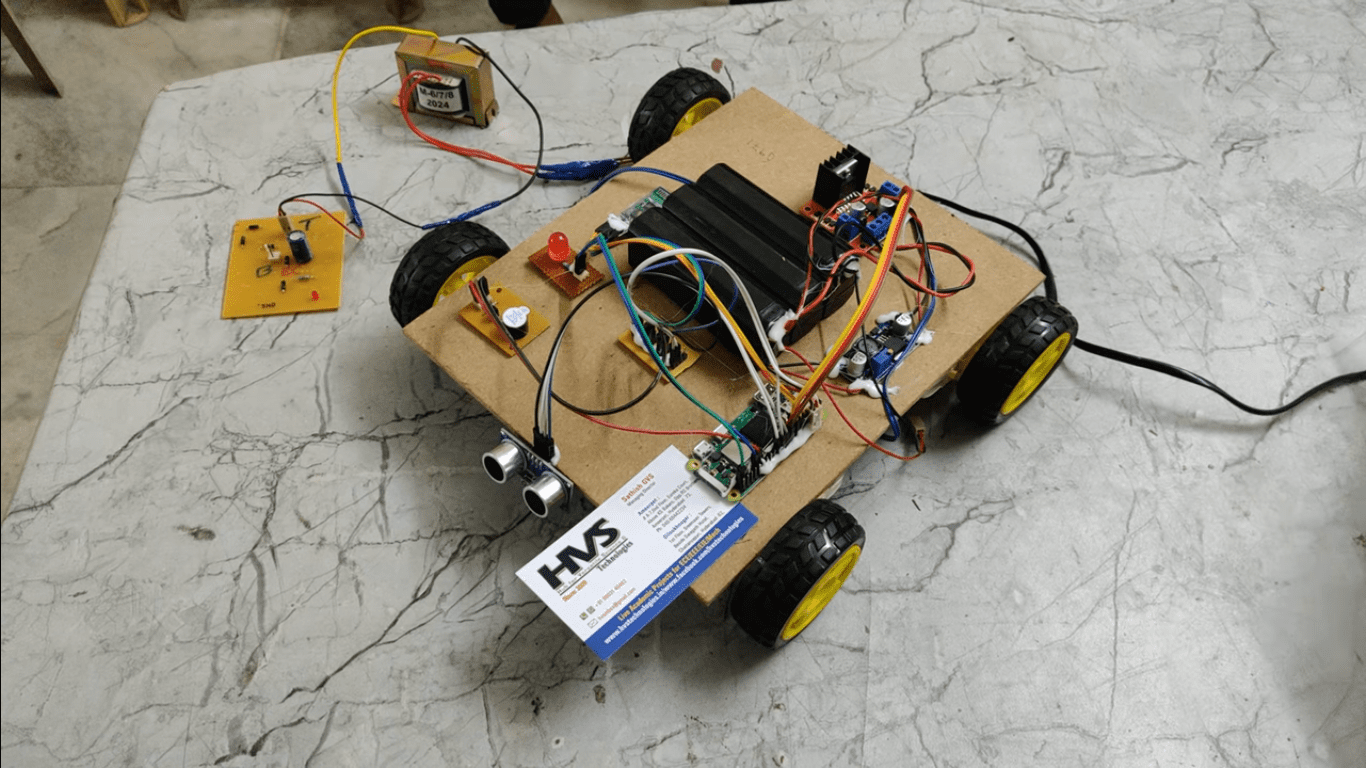
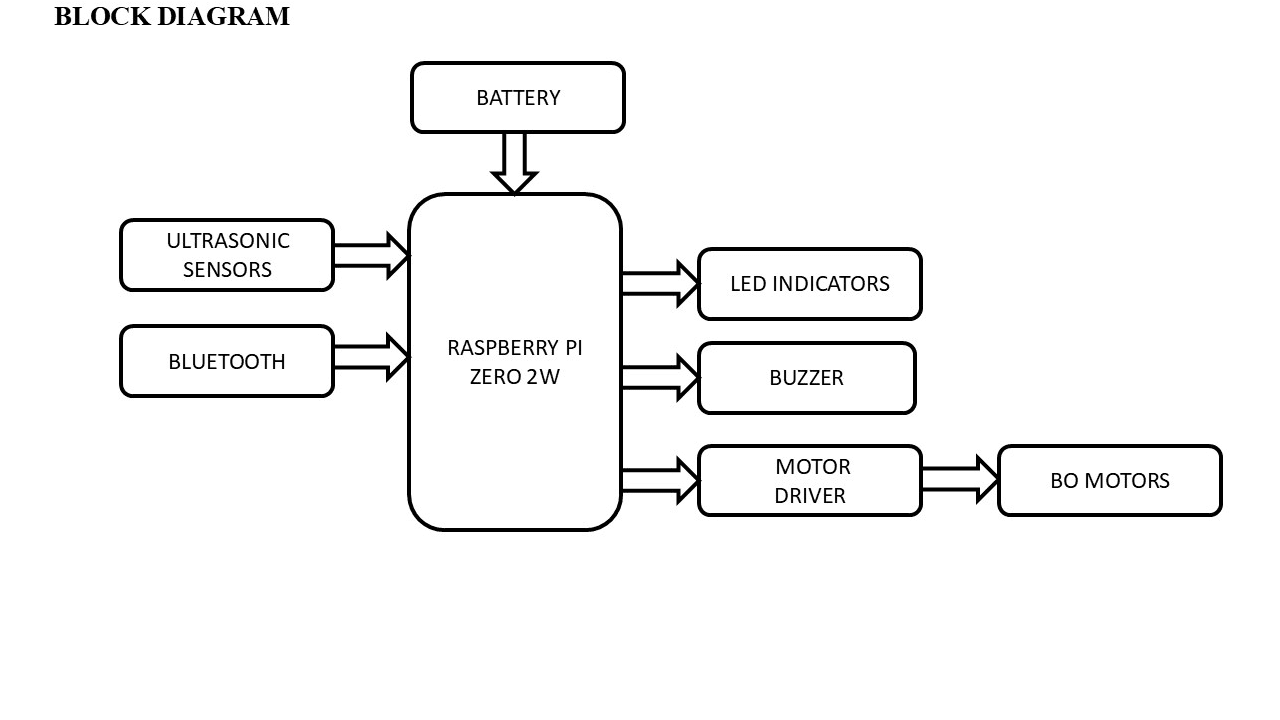
This project presents the design and implementation of an autonomous robot using a Raspberry Pi Zero 2W, coupled with various sensors and components to enable intelligent navigation and interaction. The robot is equipped with an ultrasonic sensor for obstacle detection and avoidance, a Bluetooth module for remote control, and motor drivers to control movement via BO motors. Additionally, LED indicators are used to provide visual feedback on the robot’s status, while a buzzer is incorporated to signal specific events or alerts. A rechargeable battery provides the necessary power for sustained operation. The system integrates the components through a combination of hardware and software, enabling the robot to navigate its environment autonomously, avoid obstacles, and respond to user commands via Bluetooth. The Raspberry Pi Zero 2W acts as the central processing unit, running the control algorithms and managing communication between the various modules. This project demonstrates the feasibility of creating a low-cost, compact, and versatile autonomous robot suitable for educational, research, or hobbyist applications.
Features:
- Autonomous navigation using ultrasonic sensor for obstacle detection.
- Bluetooth control for remote operation.
- BO motors for precise movement control.
- Motor driver for efficient motor control.
- LED indicators for status visualization.
- Buzzer for alerts and notifications.
- Rechargeable battery for portable, continuous power.
- Raspberry Pi Zero 2W as the central controller for processing and communication.
.The major building blocks of this project are:
 video:
video:
- Battery Power Supply.
- Raspberry Pi Zero 2w.
- Buzzer.
- Led.
- Ultrasonic Sensors.
- Bluetooth.
- Motor Driver With Bo Motors.
- Raspbian OS.
 video:
video:







